注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
2.1.4 ポテンショメータ
注釈
お使いのキットの種類によって、 ADC0834 か MCP3008 のどちらかをご確認のうえ、それぞれの説明に進んでください。
前書き
ADC機能を使用してアナログ信号をデジタル信号に変換でき、この実験では、 ADC0834を使用してADCに関する関数を取得する。 ここでは、ポテンショメータを使用してこのプロセスを実装する。 ポテンショメーターはADC機能によって変換される物理量-電圧を変更する。
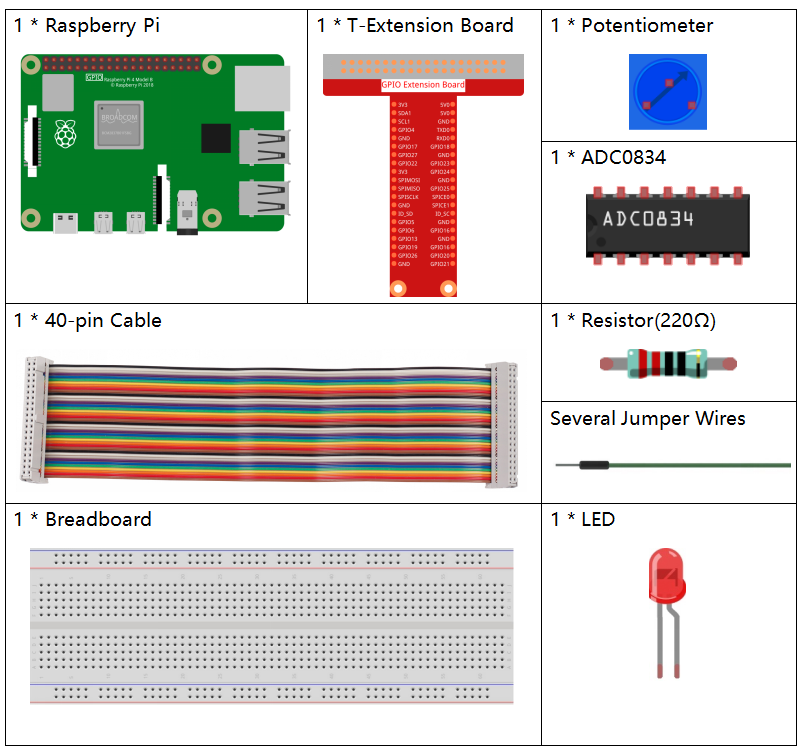
部品
原理
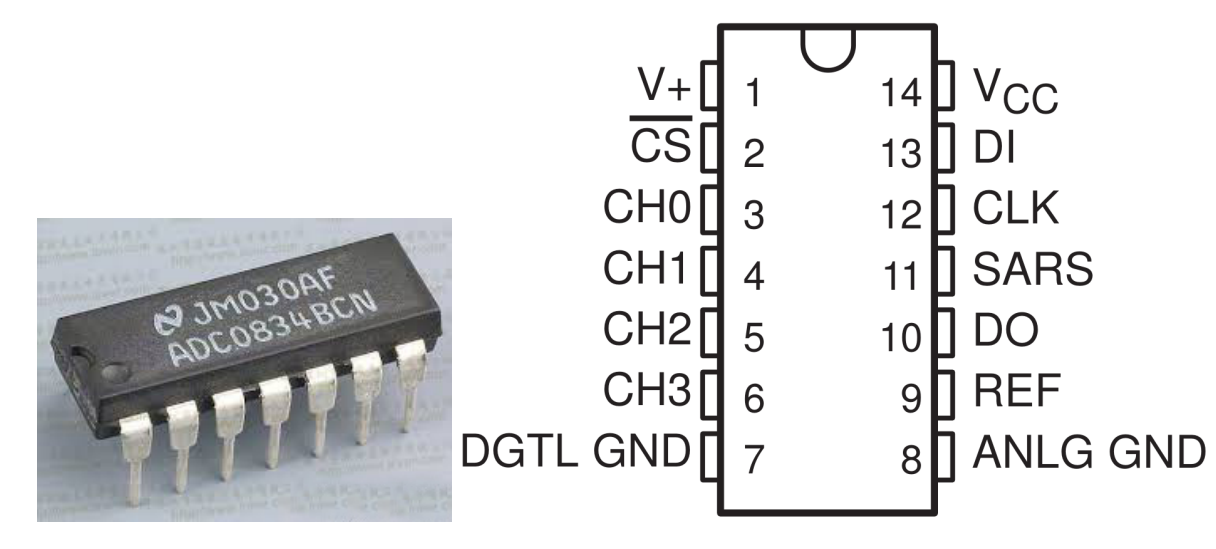
ADC0834
ADC0834 は、入力構成可能なマルチチャンネル マルチプレクサとシリアル入出力を備えた 8 ビットの逐次比較型 A/D コンバータです。 シリアル入出力は、標準的なシフトレジスターやマイクロプロセッサーとのインターフェースとして構成されています。
操作の順序
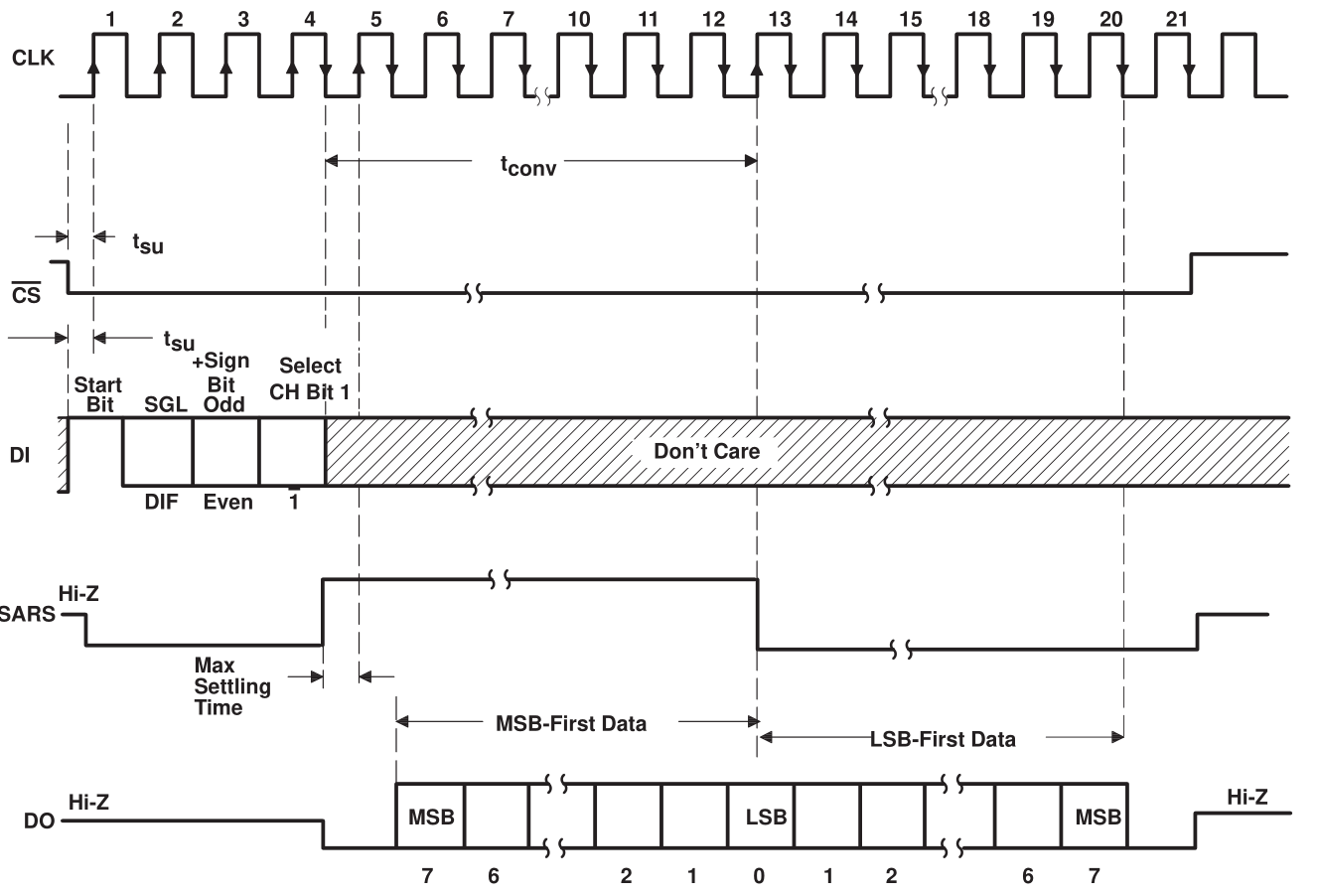
変換はCSをlowに設定することで開始され、 論理回路がすべて有効になる。 変換プロセスを完了するには、CSをlowに保持する必要がある。 次に、プロセッサからクロック入力を受信する。 クロック入力のLowからHighへの遷移ごとに、 DI上のデータがマルチプレクサーアドレスシフトレジスタに入力される。 入力の最初のロジックhighはスタートビットである。スタートビットの後に、 3〜4ビットの割り当てワードが続く。クロック入力のLowからHighへの遷移ごとに、 スタートビットと割り当てワードがシフトレジスターにシフトする。 スタートビットがマルチプレクサレジスタの開始位置にシフトされると、 入力チャネルが選択され、変換が開始される。SAR Statu出力(SARS)は、 変換が進行中であることを示すために高レベルになり、 マルチプレクサーシフトレジスタへのDIは変換中は無効になる。
1クロック周期の間隔が自動的に挿入されて、 選択されたマルチプレックスチャネルの安定化を実現する。 データ出力DOは高インピーダンス状態から出て、 マルチプレクサの整定時間のこの1クロック期間に先行するLowを提供する。 SARコンパレータは、抵抗ラダーからの連続出力を入力アナログ信号と比較する。 コンパレータ出力は、アナログ入力が抵抗ラダー出力より大きいか小さいかを示す。 変換が進むと、変換データがDO出力ピンから同時に出力され、最上位ビット(MSB)が最初になる。
8クロック周期後、変換が完了し、SARS出力がLOWになる。 最後に、MSBファーストデータストリームの後に最下位ビットファーストデータを出力する。
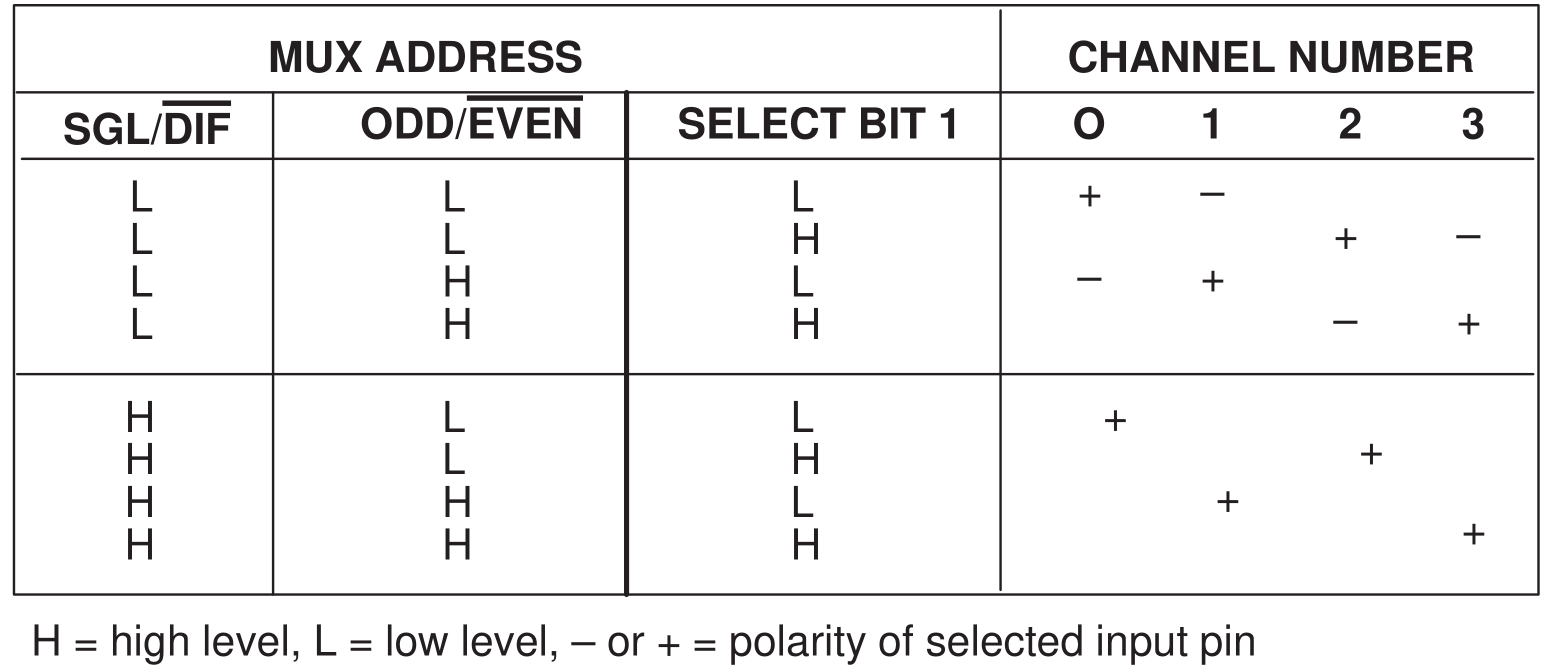
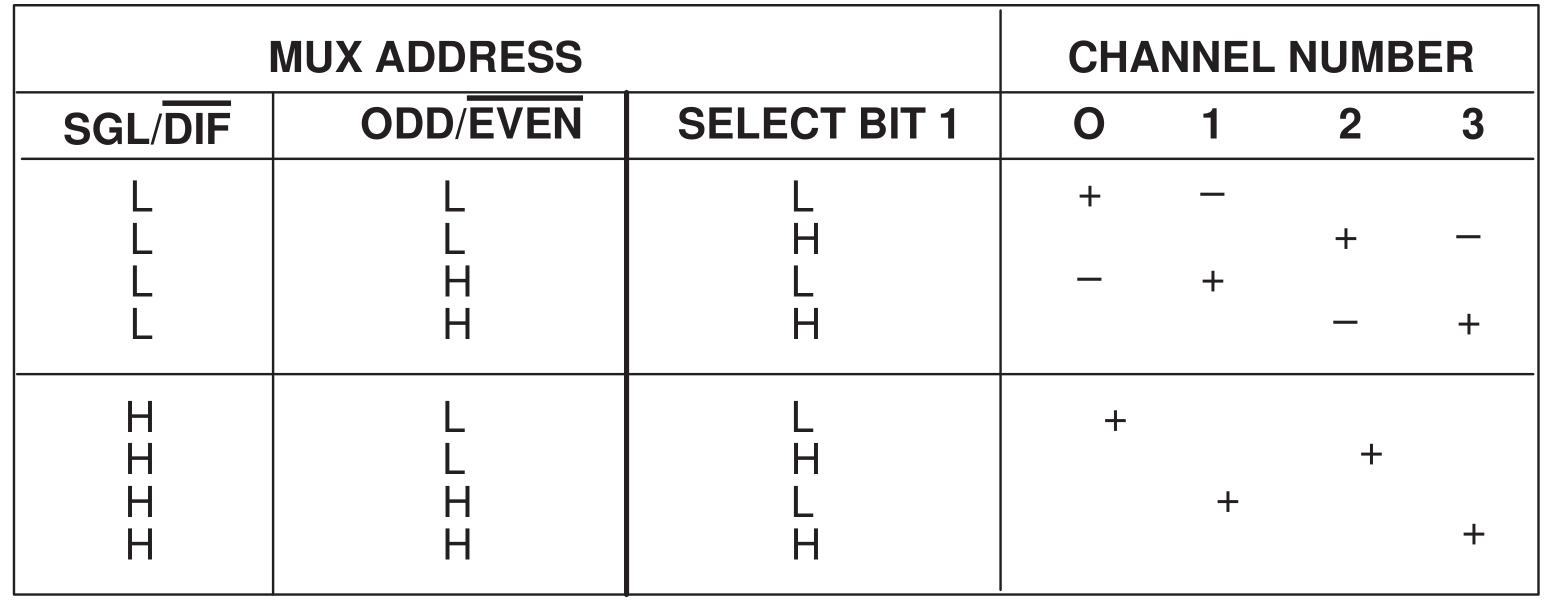
ADC0834 MUXアドレス制御論理表
ポテンショメータ
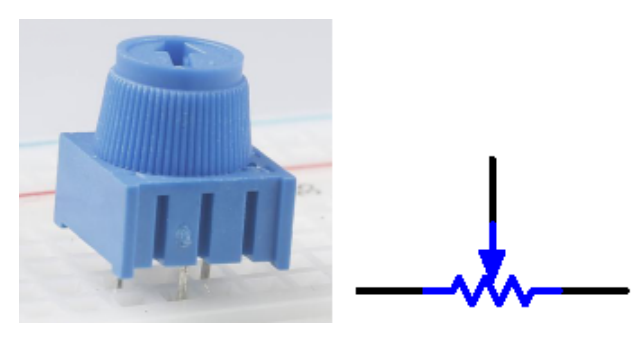
ポテンショメーターも3つの端子を持つ抵抗部品であり、その抵抗値は定期的な変動に応じて調整できる。 ポテンショメータは通常、抵抗器と可動ブラシで構成されている。 ブラシが抵抗に沿って移動しているとき、変位に応じて特定の抵抗または電圧出力が生成される。
回路内のポテンショメータの機能は次のとおりである:
分圧器として機能する
ポテンショメータは連続的に調整可能な抵抗器である。 ポテンショメータのシャフトまたはスライドハンドルを調整すると、 可動接点が抵抗器上でスライドする。この時点で、ポテンショメータに印加される電圧と、 可動アームが回転した角度または移動距離に応じて、電圧を出力できる。
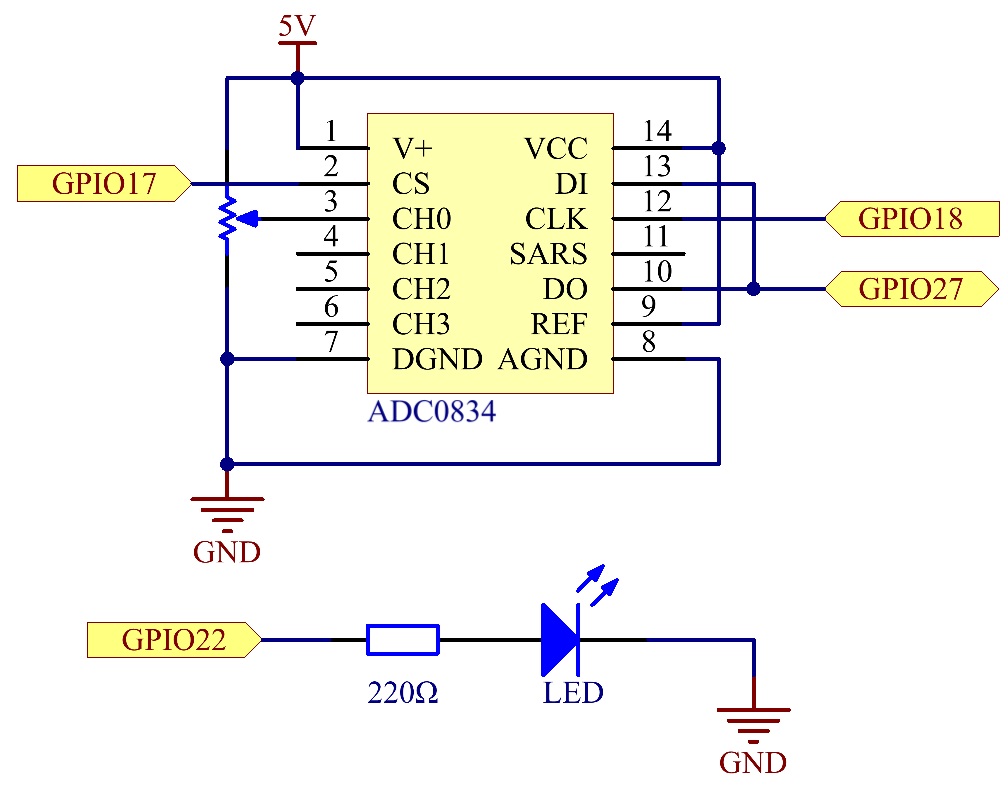
回路図
実験手順
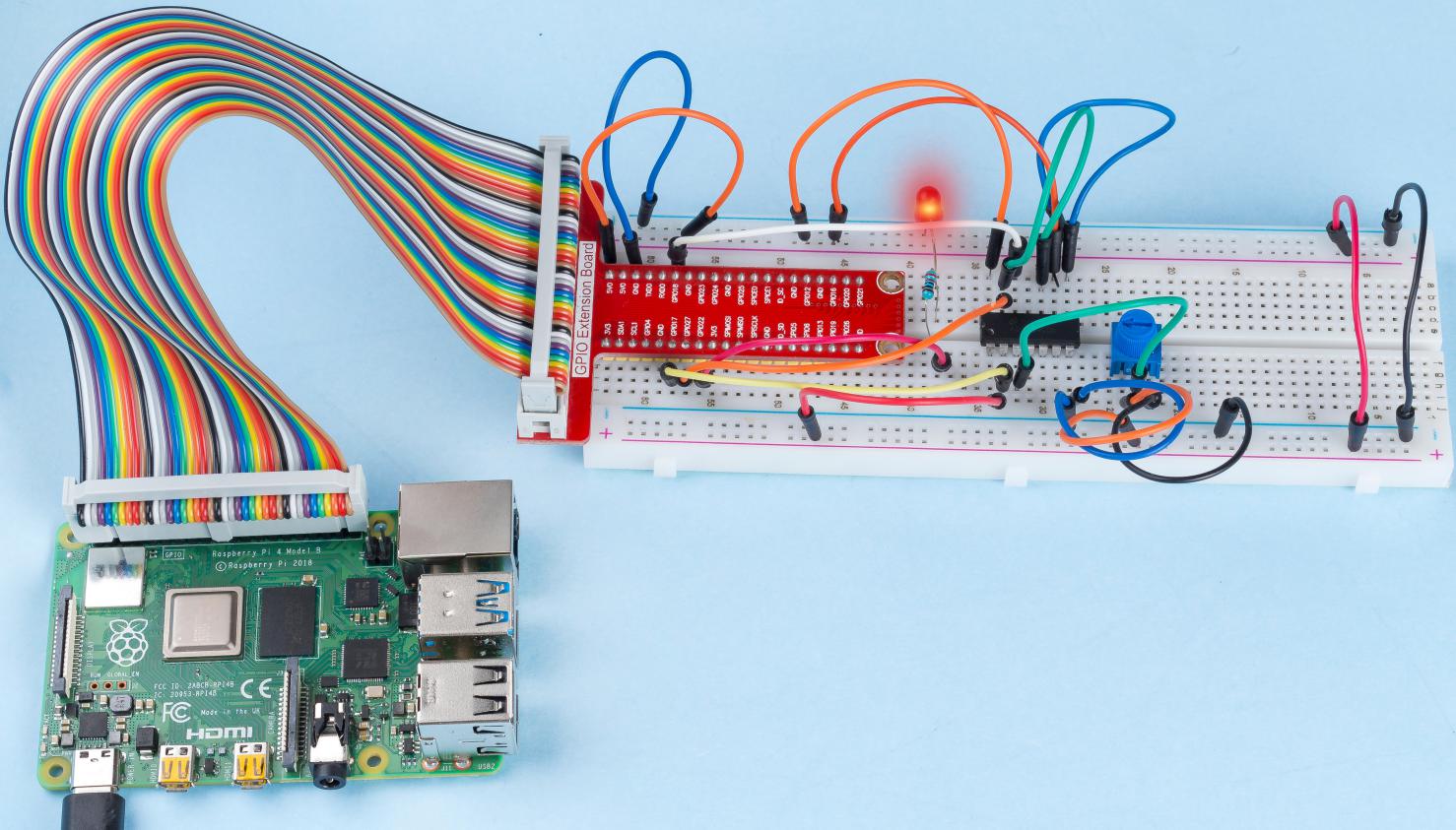
ステップ1: 回路を作る。
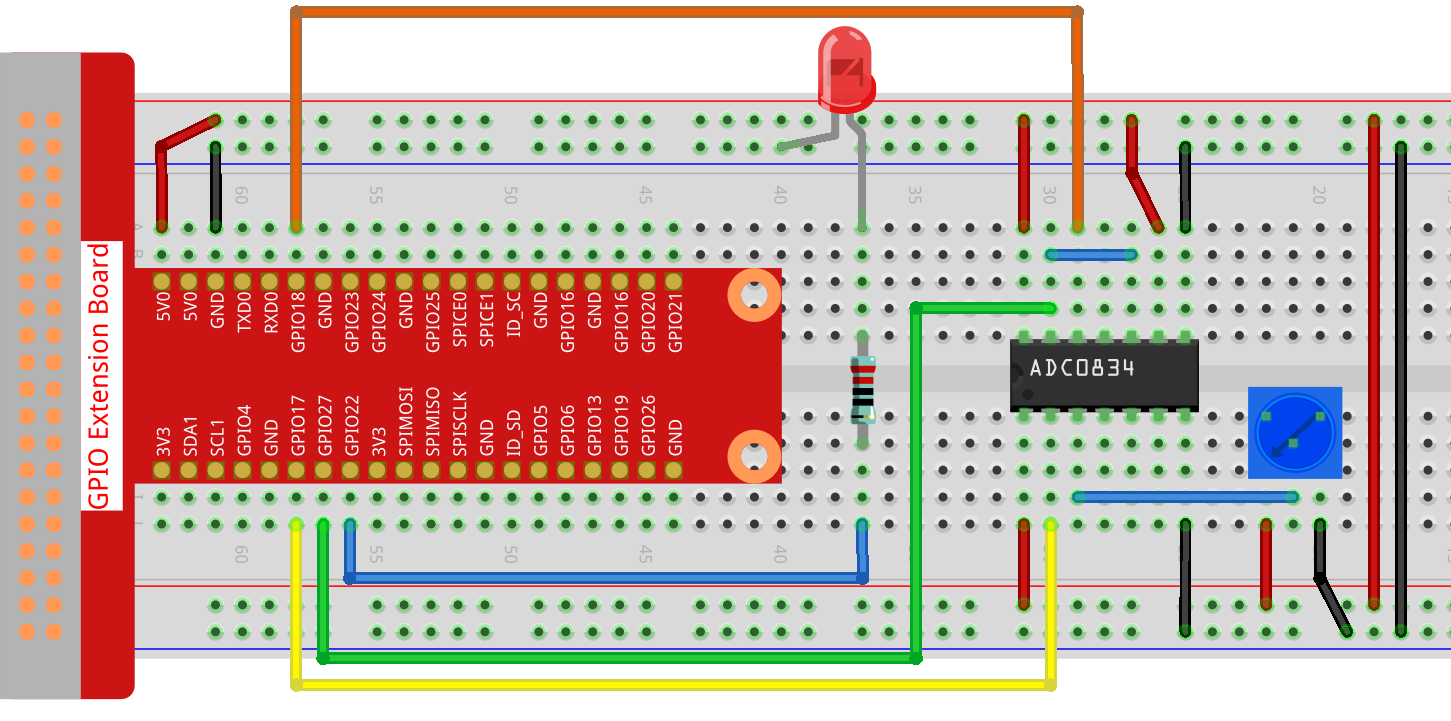
注釈
写真に示されている対応する位置を参照して、チップを配置してください。配置するときにチップの溝は左側にあることに注意してください。
C言語ユーザー向け
ステップ2: コードファイルを開く。
cd ~/davinci-kit-for-raspberry-pi/c/2.1.4/
ステップ3: コードをコンパイルする。
gcc 2.1.4_Potentiometer.c -lwiringPi
ステップ4: 実行する。
sudo ./a.out
コードの実行後、ポテンショメーターのノブを回すと、それに応じてLEDの輝度が変化する。
コード
#include <wiringPi.h>
#include <stdio.h>
#include <softPwm.h>
typedef unsigned char uchar;
typedef unsigned int uint;
#define ADC_CS 0
#define ADC_CLK 1
#define ADC_DIO 2
#define LedPin 3
uchar get_ADC_Result(uint channel)
{
uchar i;
uchar dat1=0, dat2=0;
int sel = channel > 1 & 1;
int odd = channel & 1;
digitalWrite(ADC_CLK, 1);
delayMicroseconds(2);
digitalWrite(ADC_CLK, 0);
delayMicroseconds(2);
pinMode(ADC_DIO, OUTPUT);
digitalWrite(ADC_CS, 0);
// Start bit
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
//Single End mode
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// ODD
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,odd); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
//Select
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,sel); delayMicroseconds(2);
digitalWrite(ADC_CLK,1);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
for(i=0;i<8;i++)
{
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
pinMode(ADC_DIO, INPUT);
dat1=dat1<<1 | digitalRead(ADC_DIO);
}
for(i=0;i<8;i++)
{
dat2 = dat2 | ((uchar)(digitalRead(ADC_DIO))<<i);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
}
digitalWrite(ADC_CS,1);
pinMode(ADC_DIO, OUTPUT);
return(dat1==dat2) ? dat1 : 0;
}
int main(void)
{
uchar analogVal;
if(wiringPiSetup() == -1){ //when initialize wiring failed,print messageto screen
printf("setup wiringPi failed !");
return 1;
}
softPwmCreate(LedPin, 0, 100);
pinMode(ADC_CS, OUTPUT);
pinMode(ADC_CLK, OUTPUT);
while(1){
analogVal = get_ADC_Result(0);
printf("Current analogVal : %d\n", analogVal);
delay(100);
softPwmWrite(LedPin, analogVal);
delay(100);
}
return 0;
}
コードの説明
#define ADC_CS 0
#define ADC_CLK 1
#define ADC_DIO 2
#define LedPin 3
ADC0834のCS、CLK、DIOを定義し、それぞれGPIO0、GPIO1、GPIO2に接続する。それから、GPIO3にLEDを取り付ける。
uchar get_ADC_Result(uint channel)
{
uchar i;
uchar dat1=0, dat2=0;
int sel = channel > 1 & 1;
int odd = channel & 1;
digitalWrite(ADC_CLK, 1);
delayMicroseconds(2);
digitalWrite(ADC_CLK, 0);
delayMicroseconds(2);
pinMode(ADC_DIO, OUTPUT);
digitalWrite(ADC_CS, 0);
// Start bit
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
//Single End mode
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// ODD
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,odd); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
//Select
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,sel); delayMicroseconds(2);
digitalWrite(ADC_CLK,1);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
for(i=0;i<8;i++)
{
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
pinMode(ADC_DIO, INPUT);
dat1=dat1<<1 | digitalRead(ADC_DIO);
}
for(i=0;i<8;i++)
{
dat2 = dat2 | ((uchar)(digitalRead(ADC_DIO))<<i);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
}
digitalWrite(ADC_CS,1);
pinMode(ADC_DIO, OUTPUT);
return(dat1==dat2) ? dat1 : 0;
}
ADC0834 には、アナログからデジタルへの変換を行う機能がある。特定の ワークフローは次のとおりです:
digitalWrite(ADC_CS, 0);
CSを低レベルに設定し、AD変換の有効化を開始する。
// Start bit
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
クロック入力の lowからhighへの遷移が最初に発生したとき、 スタートビットとしてDIOを 1に設定する。次の三つのステップには 、割り当て単語が3つある 。
//Single End mode
digitalWrite(ADC_CLK,0);
igitalWrite(ADC_DIO,1); delayMicroseconds(2);
gitalWrite(ADC_CLK,1); delayMicroseconds(2);
クロック入力のlowからhighへの遷移が二回発生したらすぐに、DIOを1に設定し、SGLモードを選択する。
// ODD
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,odd); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
三回目に発生すると、DIOの値は変数 odd によって制御される。
//Select
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,sel); delayMicroseconds(2);
digitalWrite(ADC_CLK,1);
CLKのパルスが4番目に低レベルから高レベルに変換されると、DIOの値は変数 sel によって制御される。
channel = 0、sel = 0、odd = 0の条件下では、 sel および odd に関する演算式は次のとおりである:
int sel = channel > 1 & 1;
int odd = channel & 1;
channel = 1、sel = 0、odd = 1という条件が満たされている場合、 次のアドレス制御ロジックテーブルを参照してください。ここで、 CH1が選択され、開始ビットがマルチプレクサレジスタの開始位置にシフトされ、変換が開始される。
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
ここでは、DIOを1に二回設定し、それを無視してください。
for(i=0;i<8;i++)
{
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
pinMode(ADC_DIO, INPUT);
dat1=dat1<<1 | digitalRead(ADC_DIO);
}
最初の for() statement で、CLKの五番目のパルスがHighレベルから低レベルに変換したらすぐに、
DIOを入力モードに設定してください。
それから、変換が開始され、変換された値が変数dat1に保存される。8クロック周期後、変換が完了する。
for(i=0;i<8;i++)
{
dat2 = dat2 | ((uchar)(digitalRead(ADC_DIO))<<i);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
}
2番目最初の for()statement では、
他の最初の8つの後にDOを介して値を変換を出力し、変数dat2に保存する。
digitalWrite(ADC_CS,1);
pinMode(ADC_DIO, OUTPUT);
return(dat1==dat2) ? dat1 : 0;
return(dat1 == dat2)? dat1:0; は、変換中に得られた値と出力値を比較するために使用される。
それらが互いに等しい場合、変換値dat1を出力する。
それ以外の場合は、0を出力する。これで、ADC0834の処理が完了した。
softPwmCreate(LedPin, 0, 100);
この機能はソフトウェアを使用してPWMピンLedPinを作成し、 初期パルス幅を0に設定し、PWMの周期を100 x 100usにするために使用される。
while(1){
analogVal = get_ADC_Result(0);
printf("Current analogVal : %d\n", analogVal);
softPwmWrite(LedPin, analogVal);
delay(100);
}
メイ プログラムで、 ポテンショメーターに最初接続されているチャンネル0 0 の値 を 読み取る 。 そして、最初値を最初変数analogValに保存してから LedPinに書き込む。 これで、ポテンショメータの値によってLEDの輝度が変化することを見ることができる。
Pythonユーザー向け
ステップ2: コードファイルを開く
cd ~/davinci-kit-for-raspberry-pi/python/
ステップ3: 実行する。
sudo python3 2.1.4_Potentiometer.py
コードの実行後、ポテンショメーターのノブを回すと、それに応じてLEDの輝度が変化する。
コード
注釈
以下のコードを 変更/リセット/コピー/実行/停止 できます。 ただし、その前に、 davinci-kit-for-raspberry-pi/python のようなソースコードパスに移動する必要があります。
import RPi.GPIO as GPIO
import ADC0834
import time
LedPin = 22
def setup():
global led_val
# Set the GPIO modes to BCM Numbering
GPIO.setmode(GPIO.BCM)
# Set all LedPin's mode to output and initial level to High(3.3v)
GPIO.setup(LedPin, GPIO.OUT, initial=GPIO.HIGH)
ADC0834.setup()
# Set led as pwm channel and frequece to 2KHz
led_val = GPIO.PWM(LedPin, 2000)
# Set all begin with value 0
led_val.start(0)
def destroy():
# Stop all pwm channel
led_val.stop()
# Release resource
GPIO.cleanup()
def loop():
while True:
analogVal = ADC0834.getResult()
print ('analog value = %d' % analogVal)
led_val.ChangeDutyCycle(analogVal*100/255)
time.sleep(0.2)
if __name__ == '__main__':
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the program destroy() will be executed.
destroy()
コードの説明
import ADC0834
ADC0834ライブラリをインポートする。コマンド nano ADC0834.py を呼び出して、ライブラリの内容を確認できる。
def setup():
global led_val
# Set the GPIO modes to BCM Numbering
GPIO.setmode(GPIO.BCM)
# Set all LedPin's mode to output and initial level to High(3.3v)
GPIO.setup(LedPin, GPIO.OUT, initial=GPIO.HIGH)
ADC0834.setup()
# Set led as pwm channel and frequece to 2KHz
led_val = GPIO.PWM(LedPin, 2000)
# Set all begin with value 0
led_val.start(0)
setup() で、命名方法をBCMとして定義し、LedPinをPWMチャネルとして設定し、2Khzの周波数にレンダリングする。
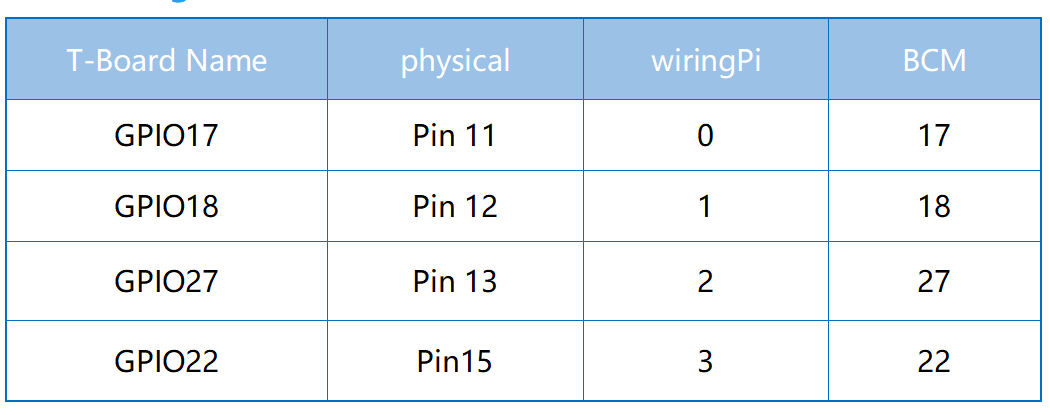
ADC0834.setup(): ADC0834を初期化し、ADC0834の定義されたCS、CLK、DIOをそれぞれGPIO17、GPIO18、GPIO27に接続する。
def loop():
while True:
res = ADC0834.getResult()
print ('res = %d' % res)
R_val = MAP(res, 0, 255, 0, 100)
led_val.ChangeDutyCycle(R_val)
time.sleep(0.2)
関数 getResult() はADC0834の4つのチャンネルのアナログ値を読み取るために使用される。
デフォルトでは、関数はCH0の値を読み取り、
他のチャネルを読み取りたい場合は、() にチャネル番号を入力してください(例えば getResult(1) )。
関数 loop() は最初にCH0の値を読み取り、それから変数resに値を割り当てる。
その後、関数MAPを呼び出して、ポテンショメーターの読み取り値を0〜100にマッピングする。
このステップはLedPinのデューティサイクルを制御するために使用される。
これで、ポテンショメータの値によってLEDの輝度が変化していることがわかる。
現象画像