Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauche tiefer in Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten ein.
Warum beitreten?
Expertenunterstützung: Löse Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tausche Tipps und Tutorials aus, um deine Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalte frühzeitigen Zugang zu neuen Produktankündigungen und Vorschauen.
Sonderrabatte: Genieße exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Verlosungen: Nimm an Verlosungen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu erschaffen? Klicke auf [hier] und tritt noch heute bei!
3.1.4 Intelligenter Lüfter (MCP3008)
Bemerkung
Je nach deiner Kit-Version überprüfe bitte, ob du ADC0834 oder MCP3008 hast, und fahre mit dem entsprechenden Abschnitt fort.
Einführung
In diesem Projekt verwenden wir Motoren, Taster und Thermistoren, um einen manuellen + automatischen intelligenten Lüfter zu bauen, dessen Windgeschwindigkeit einstellbar ist.
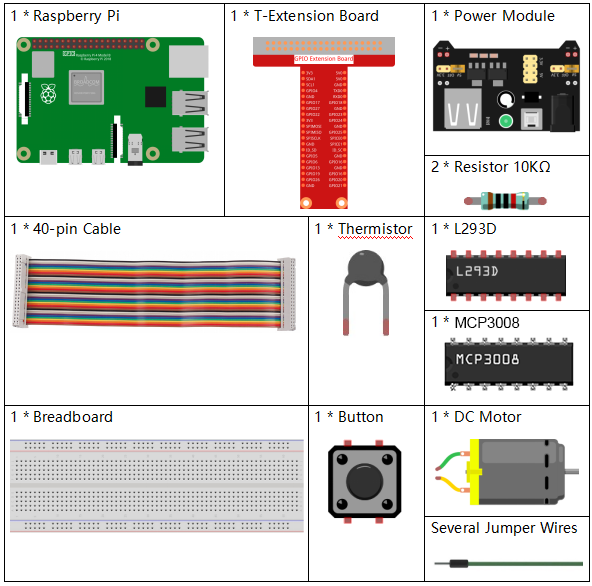
Benötigte Komponenten
In diesem Projekt benötigen wir die folgenden Komponenten.
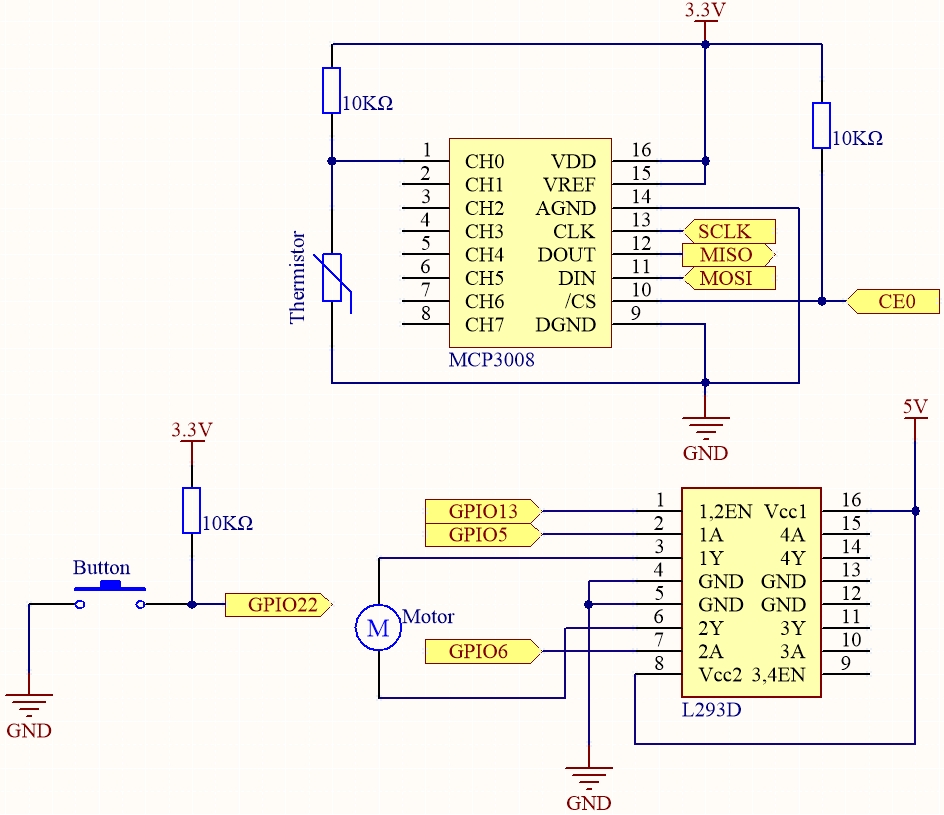
Schaltplan
T-Board-Name |
Physical |
WiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |
Experimentelle Schritte
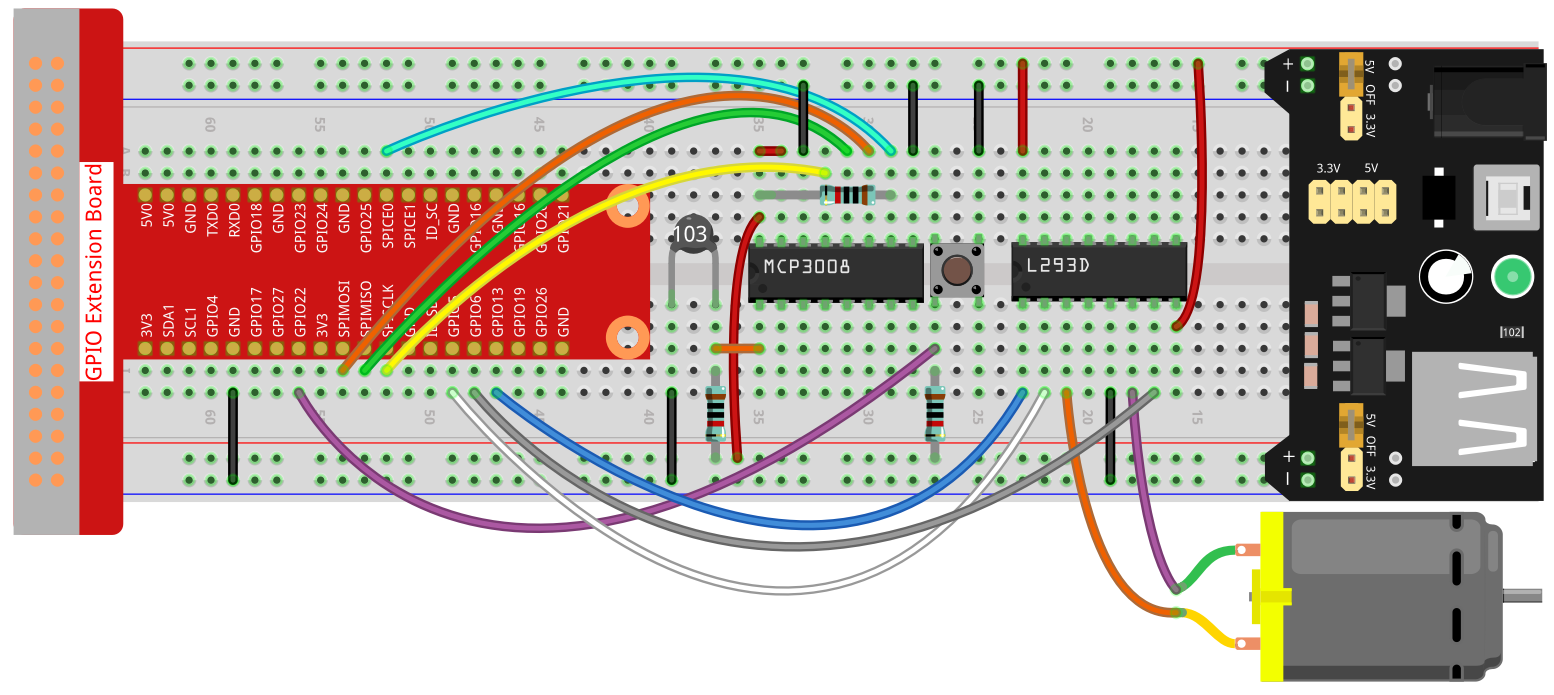
Schritt 1: Baue die Schaltung auf.
Bemerkung
Das Strommodul kann mit einer 9V-Batterie über den im Kit enthaltenen 9V-Batterieclip betrieben werden. Stecke die Jumperkappe des Strommoduls in die 5V-Stromschiene des Breadboards.

Schritt 2: Gehe in den Code-Ordner.
cd ~/davinci-kit-for-raspberry-pi/c/3.1.4-2/
Schritt 3: Kompiliere.
gcc 3.1.4_SmartFan.c -o SmartFan -lwiringPi -lm
Schritt 4: Führe die erstellte Datei aus.
./SmartFan
Während der Code läuft, starte den Lüfter, indem du den Taster drückst. Jedes Drücken erhöht oder verringert die Geschwindigkeit um eine Stufe. Es gibt 5 Geschwindigkeitsstufen: 0–4. Wenn die 4. Stufe erreicht ist und du erneut drückst, stoppt der Lüfter (Stufe 0).
Sobald die Temperatur um mehr als 2 °C steigt oder fällt, wird die Geschwindigkeit automatisch um eine Stufe erhöht oder verringert.
Bemerkung
Falls es nach dem Ausführen nicht funktioniert oder die Fehlermeldung „wiringPi.h: No such file or directory“ erscheint, siehe Installieren und Überprüfen von WiringPi.
Code
#include <wiringPi.h>
#include <wiringPiSPI.h>
#include <stdio.h>
#include <softPwm.h>
#include <math.h>
#define SPI_CHANNEL 0
#define SPI_SPEED 1000000
#define MotorPin1 21
#define MotorPin2 22
#define MotorEnable 23
#define BtnPin 3
int read_ADC(int channel)
{
if (channel < 0 || channel > 7) return -1;
unsigned char buffer[3];
buffer[0] = 1; // Startbit
buffer[1] = (8 + channel) << 4; // Single-Ended-Modus und Kanal
buffer[2] = 0;
wiringPiSPIDataRW(SPI_CHANNEL, buffer, 3);
int result = ((buffer[1] & 3) << 8) | buffer[2];
return result;
}
int temperture()
{
int analogVal = read_ADC(0);
double Vr = 3.3 * analogVal / 1023.0; // 3,3V als Vref
double Rt = 10000.0 * Vr / (3.3 - Vr);
double temp = 1 / (((log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0)));
double cel = temp - 273.15;
double Fah = cel * 1.8 + 32;
printf("Celsius: %.2f C Fahrenheit: %.2f F\n", cel, Fah);
return (int)cel;
}
int motor(int level)
{
if (level == 0) {
digitalWrite(MotorEnable, LOW);
return 0;
}
if (level >= 4) {
level = 4;
}
digitalWrite(MotorEnable, HIGH);
softPwmWrite(MotorPin1, level * 25);
return level;
}
void setup()
{
if (wiringPiSetup() == -1) {
printf("wiringPi-Setup fehlgeschlagen!\n");
return;
}
if (wiringPiSPISetup(SPI_CHANNEL, SPI_SPEED) == -1) {
printf("SPI-Setup fehlgeschlagen!\n");
return;
}
softPwmCreate(MotorPin1, 0, 100);
softPwmCreate(MotorPin2, 0, 100);
pinMode(MotorEnable, OUTPUT);
pinMode(BtnPin, INPUT);
}
int main(void)
{
setup();
int currentState, lastState = 0;
int level = 0;
int currentTemp, markTemp = 0;
while (1) {
currentState = digitalRead(BtnPin);
currentTemp = temperture();
if (currentTemp <= 0) continue;
if (currentState == 1 && lastState == 0) {
level = (level + 1) % 5;
markTemp = currentTemp;
delay(500);
}
lastState = currentState;
if (level != 0) {
if (currentTemp - markTemp <= -2) {
level = level - 1;
markTemp = currentTemp;
}
if (currentTemp - markTemp >= 2) {
level = level + 1;
markTemp = currentTemp;
}
}
level = motor(level);
}
return 0;
}
Code-Erklärung
int read_ADC(int channel)
{
if (channel < 0 || channel > 7) return -1;
unsigned char buffer[3];
buffer[0] = 1; // Startbit
buffer[1] = (8 + channel) << 4; // Single-Ended-Modus und Kanal
buffer[2] = 0;
wiringPiSPIDataRW(SPI_CHANNEL, buffer, 3);
int result = ((buffer[1] & 3) << 8) | buffer[2];
return result;
}
Diese Funktion liest den analogen Eingang des MCP3008 am angegebenen Kanal. Sie sendet einen 3-Byte-SPI-Befehl und gibt einen 10-Bit-Digitalwert (0–1023) zurück.
int temperture()
{
int analogVal = read_ADC(0);
double Vr = 3.3 * analogVal / 1023.0; // 3,3V als Vref
double Rt = 10000.0 * Vr / (3.3 - Vr);
double temp = 1 / (((log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0)));
double cel = temp - 273.15;
double Fah = cel * 1.8 + 32;
printf("Celsius: %.2f C Fahrenheit: %.2f F\n", cel, Fah);
return (int)cel;
}
Die Funktion temperture() liest das analoge Signal des Thermistors über den MCP3008,
berechnet die Spannung und den Widerstand und wandelt diese mithilfe der Thermistorformel (Steinhart–Hart-Approximation) in °C und °F um.
int motor(int level)
{
if (level == 0) {
digitalWrite(MotorEnable, LOW);
return 0;
}
if (level >= 4) {
level = 4;
}
digitalWrite(MotorEnable, HIGH);
softPwmWrite(MotorPin1, level * 25);
return level;
}
Die Funktion motor() steuert die Lüftergeschwindigkeit über PWM.
Die Stufen reichen von 0–4, wobei 0 den Lüfter ausschaltet und jede höhere Stufe den Tastgrad um 25 % erhöht.
void setup()
{
if (wiringPiSetup() == -1) {
printf("wiringPi-Setup fehlgeschlagen!\n");
return;
}
if (wiringPiSPISetup(SPI_CHANNEL, SPI_SPEED) == -1) {
printf("SPI-Setup fehlgeschlagen!\n");
return;
}
softPwmCreate(MotorPin1, 0, 100);
softPwmCreate(MotorPin2, 0, 100);
pinMode(MotorEnable, OUTPUT);
pinMode(BtnPin, INPUT);
}
Die Funktion setup() initialisiert WiringPi, richtet SPI ein,
konfiguriert PWM und GPIO-Pins für Motorsteuerung und Tastereingabe.
int main(void)
{
setup();
int currentState, lastState = 0;
int level = 0;
int currentTemp, markTemp = 0;
while (1) {
currentState = digitalRead(BtnPin);
currentTemp = temperture();
if (currentTemp <= 0) continue;
if (currentState == 1 && lastState == 0) {
level = (level + 1) % 5;
markTemp = currentTemp;
delay(500);
}
lastState = currentState;
if (level != 0) {
if (currentTemp - markTemp <= -2) {
level = level - 1;
markTemp = currentTemp;
}
if (currentTemp - markTemp >= 2) {
level = level + 1;
markTemp = currentTemp;
}
}
level = motor(level);
}
return 0;
}
Die main()-Funktion enthält die Hauptschleife:
Liest kontinuierlich den Tasterzustand und die aktuelle Temperatur.
Bei Tastendruck wird die Lüfterstufe erhöht (0–4) und die Temperatur gespeichert.
Ändert sich die Temperatur um ±2 °C, wird die Lüftergeschwindigkeit automatisch angepasst.
Ruft
motor(level)auf, um die PWM-Ausgabe entsprechend der aktuellen Stufe zu setzen.