Nota
¡Hola, bienvenido a la Comunidad de Aficionados a Raspberry Pi, Arduino y ESP32 de SunFounder en Facebook! Profundiza en Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte de expertos: Resuelve problemas posventa y desafíos técnicos con ayuda de nuestra comunidad y equipo.
Aprender y compartir: Intercambia consejos y tutoriales para mejorar tus habilidades.
Vistas previas exclusivas: Obtén acceso anticipado a anuncios de nuevos productos y avances.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más nuevos.
Promociones festivas y sorteos: Participa en sorteos y promociones de fiestas.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [aquí] y únete hoy!
3.3 Detectar el Obstáculo¶
Este módulo se instala comúnmente en automóviles y robots para juzgar la existencia de obstáculos por delante. También se utiliza ampliamente en dispositivos portátiles, grifos de agua y otros.
Componentes Necesarios
En este proyecto, necesitamos los siguientes componentes.
Es definitivamente conveniente comprar un kit completo, aquí está el enlace:
Nombre |
ELEMENTOS EN ESTE KIT |
ENLACE |
|---|---|---|
3 in 1 Starter Kit |
380+ |
También puedes comprarlos por separado en los enlaces a continuación.
INTRODUCCIÓN DEL COMPONENTE |
ENLACE DE COMPRA |
|---|---|
Esquemático
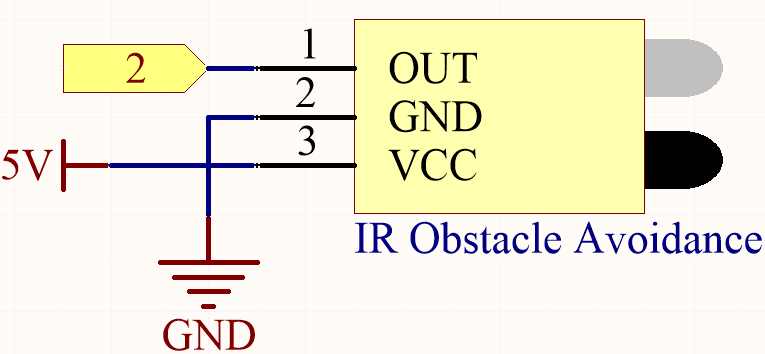
El pin digital 2 se usa para leer la señal del Módulo de Evitación de Obstáculos IR. Conectamos el VCC del Módulo Sensor IR a 5V, GND a GND, OUT al pin digital 2.
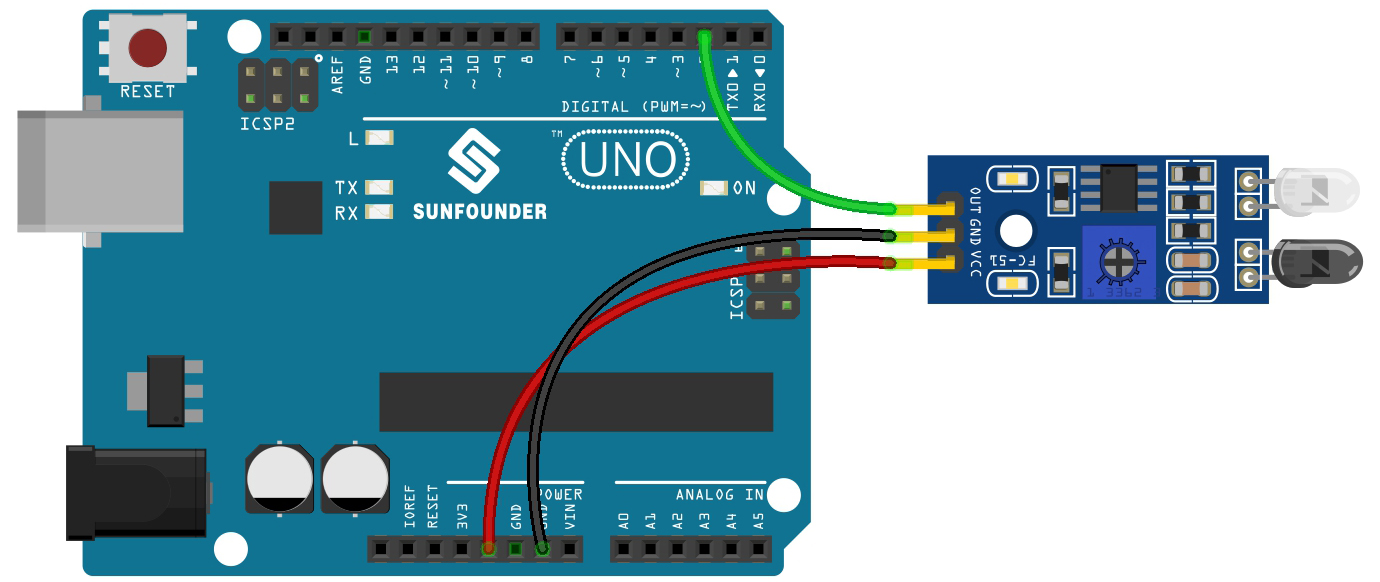
Cableado
Código
Nota
Puedes abrir el archivo
3.3.detect_the_obstacle.inoen la ruta3in1-kit\basic_project\3.3.detect_the_obstacle.O copia este código en Arduino IDE.
O carga el código a través del Editor Web de Arduino.
Cuando el módulo de evitación de obstáculos IR detecta algo bloqueando su frente, aparecerá [0] en el monitor serial, de lo contrario, se mostrará [1].