Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
Ultrasonic Module
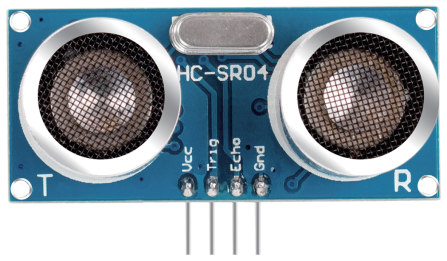
Ultrasonic ranging module provides 2cm - 400cm non-contact measurement function, and the ranging accuracy can reach to 3mm. It can ensure that the signal is stable within 5m, and the signal is gradually weakened after 5m, till the 7m position disappears.
The module includes ultrasonic transmitters, receiver and control circuit. The basic principles are as follows:
Use an IO flip-flop to process a high level signal of at least 10us.
The module automatically sends eight 40khz and detects if there is a pulse signal return.
If the signal returns, passing the high level, the high output IO duration is the time from the transmission of the ultrasonic wave to the return of it. Here, test distance = (high time x sound speed (340 m / s) / 2.
The timing diagram is shown below.
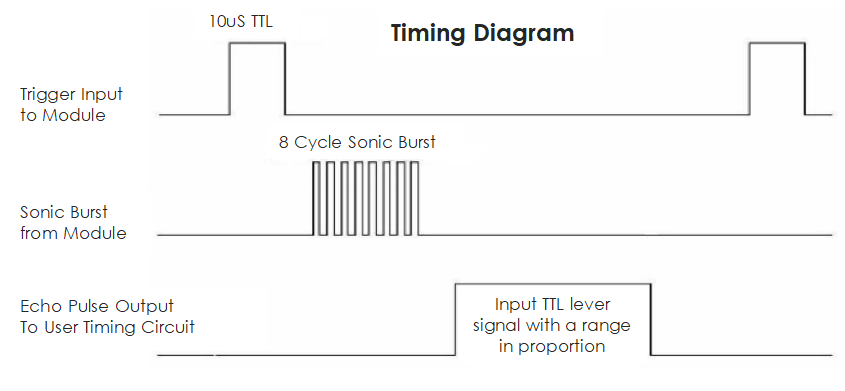
You only need to supply a short 10us pulse for the trigger input to start the ranging, and then the module will send out an 8 cycle burst of ultrasound at 40 kHz and raise its echo. You can calculate the range through the time interval between sending trigger signal and receiving echo signal.
Formula: us / 58 = centimeters or us / 148 =inch; or: the range = high level time * velocity (340M/S) / 2; you are suggested to use measurement cycle over 60ms in order to prevent signal collisions of trigger signal and the echo signal.
Example
2.33 Ultrasonic Module (Arduino Project)
3.1 Reversing Aid (Arduino Project)
2.17 GAME - Flappy Parrot (Scratch Project)