Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
Lesson 16 Joystick PS2¶
Introduction¶
A joystick is an input device consisting of a stick that pivots on a base and reports its angle or direction to the device it is controlling. Joysticks are often used to control video games and robots. A Joystick PS2 is used here.
Components¶
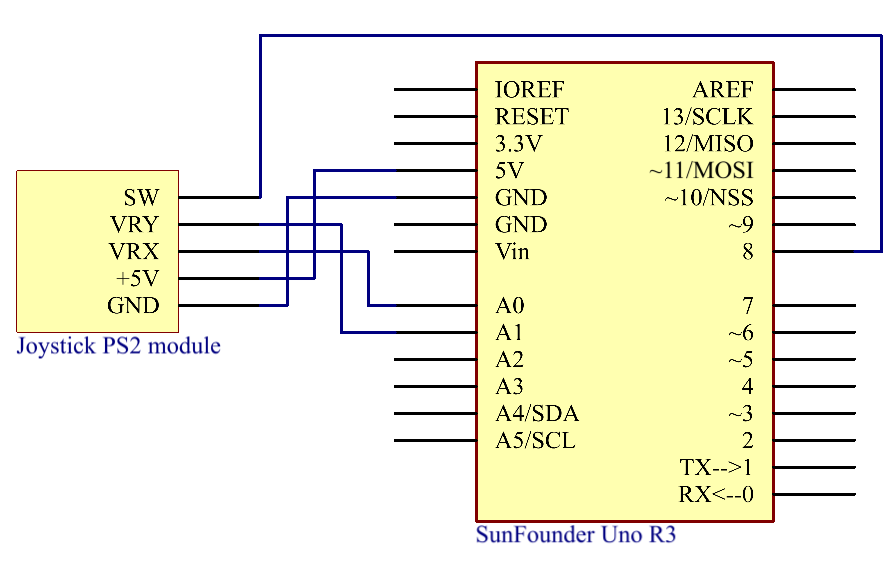
Schematic Diagram¶
This module has two analog outputs (corresponding to X,Y biaxial offsets) and one digital output representing whether it is pressed on Z axis. The module integrates power indicator and can display operation condition.
In this experiment, we use the Uno board to detect the moving direction of the Joystick knob and pressing of the button.
Experimental Procedures¶
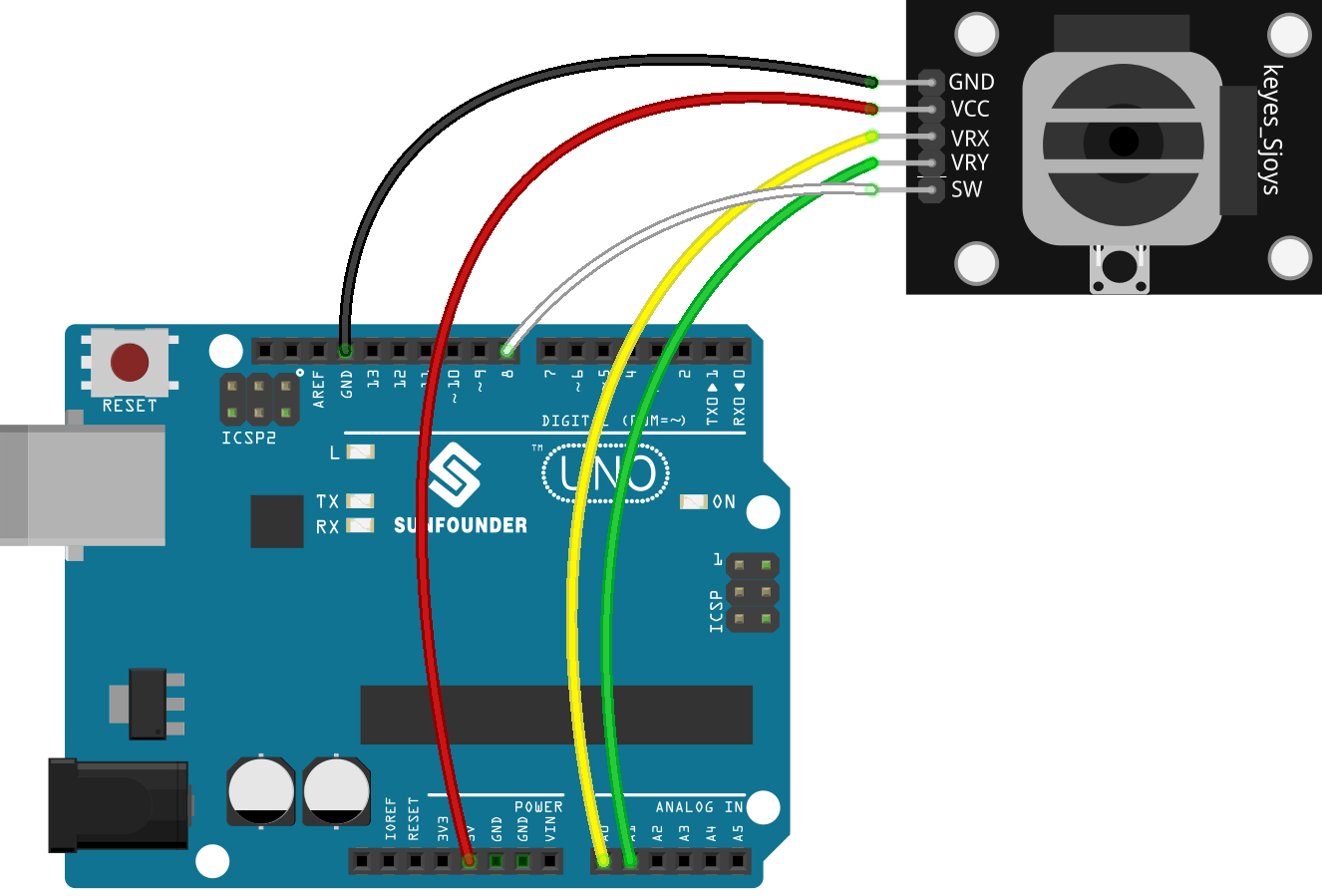
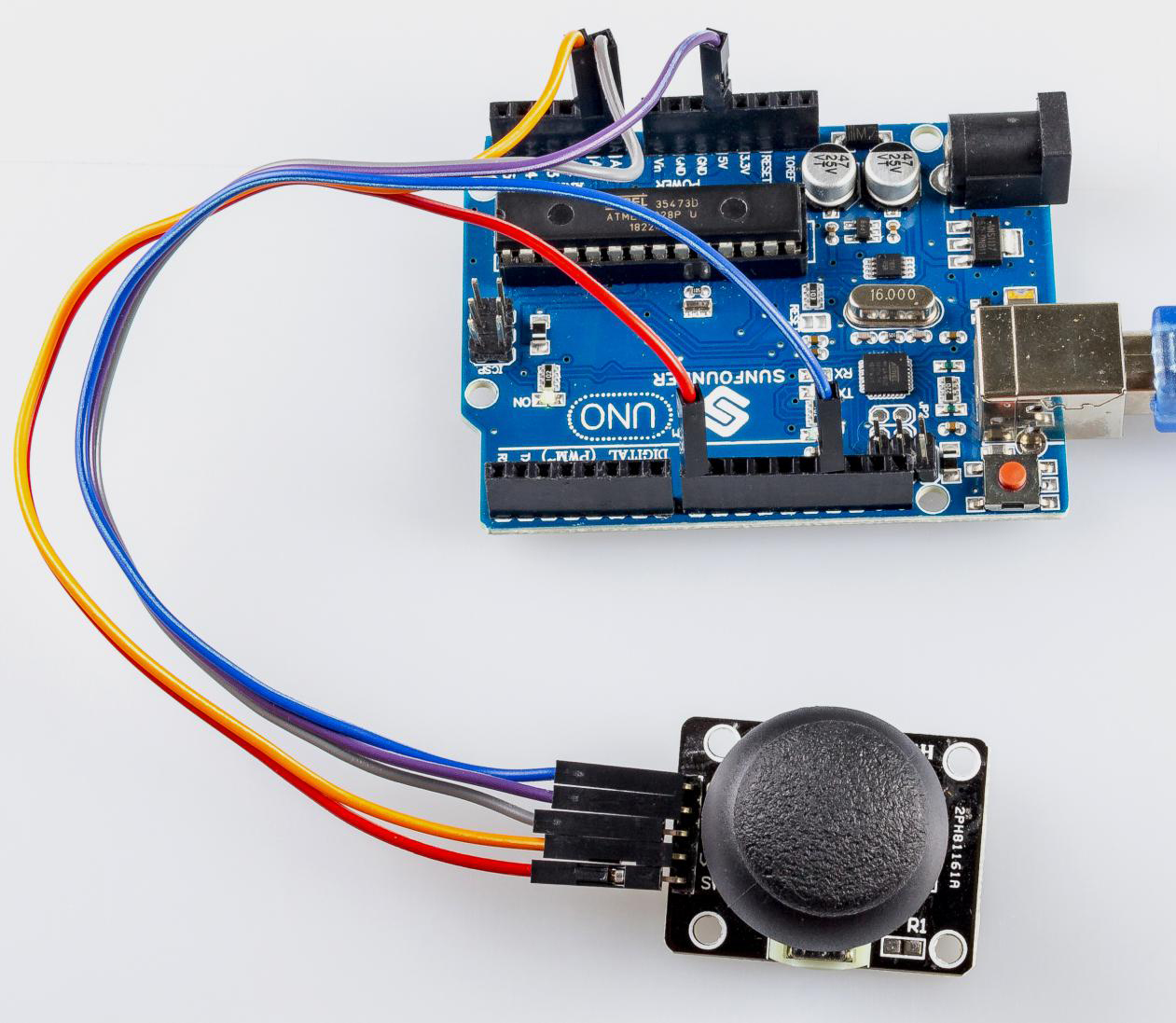
Step 1: Build the circuit.
Step 2: Open the code file.
Step 3: Select the Board and Port.
Step 4: Upload the sketch to the board.
Now, push the rocker and the coordinates of X and Y axes displayed on Serial Monitor will change accordingly; press the button, and the coordinate of Z=0 will also be displayed.
Code¶
Code Analysis¶
The code is use the serial monitor to print the value of the VRX,VRY and SW pins of the joystick ps2.
void loop()
{
Serial.print("X: ");
Serial.print(analogRead(xPin), DEC); // print the value of VRX in DEC
Serial.print("|Y: ");
Serial.print(analogRead(yPin), DEC); // print the value of VRX in DEC
Serial.print("|Z: ");
Serial.println(digitalRead(swPin)); // print the value of SW
delay(50);
}