Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
Lesson 19 Stepper Motor¶
Introduction¶
Stepper motors, due to their unique design, can be controlled to a high degree of accuracy without any feedback mechanisms. The shaft of a stepper, mounted with a series of magnets, is controlled by a series of electromagnetic coils that are charged positively and negatively in a specific sequence, precisely moving it forward or backward in small “steps”.
Components¶
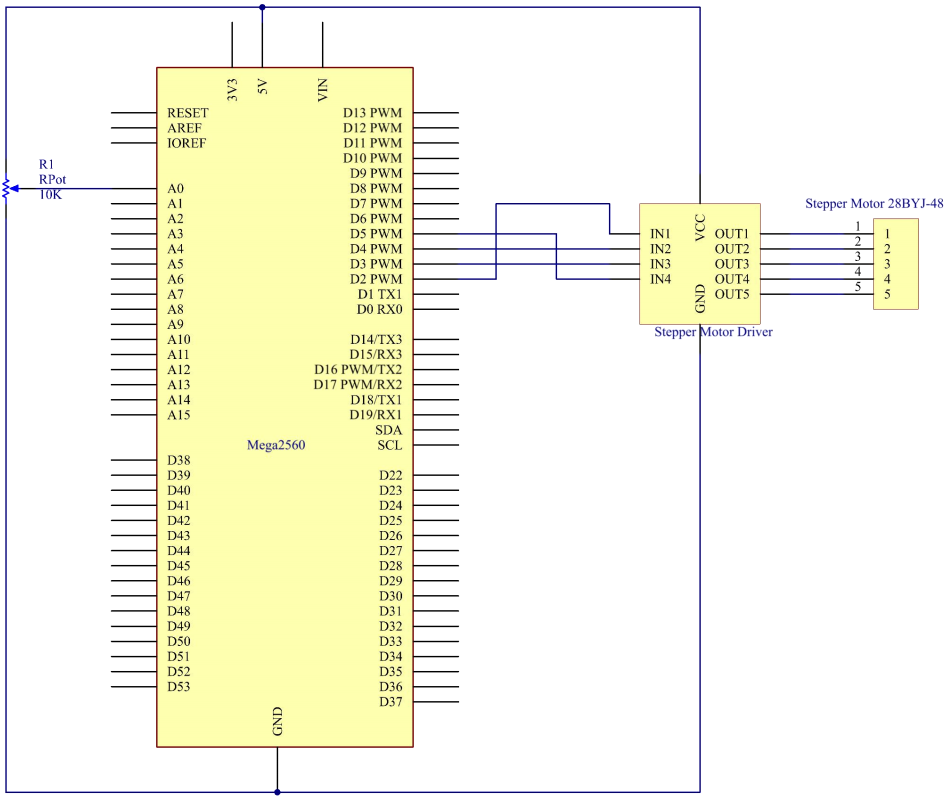
Schematic Diagram¶
The schematic diagram of the Stepper Motor Driver:
Experimental Procedures¶
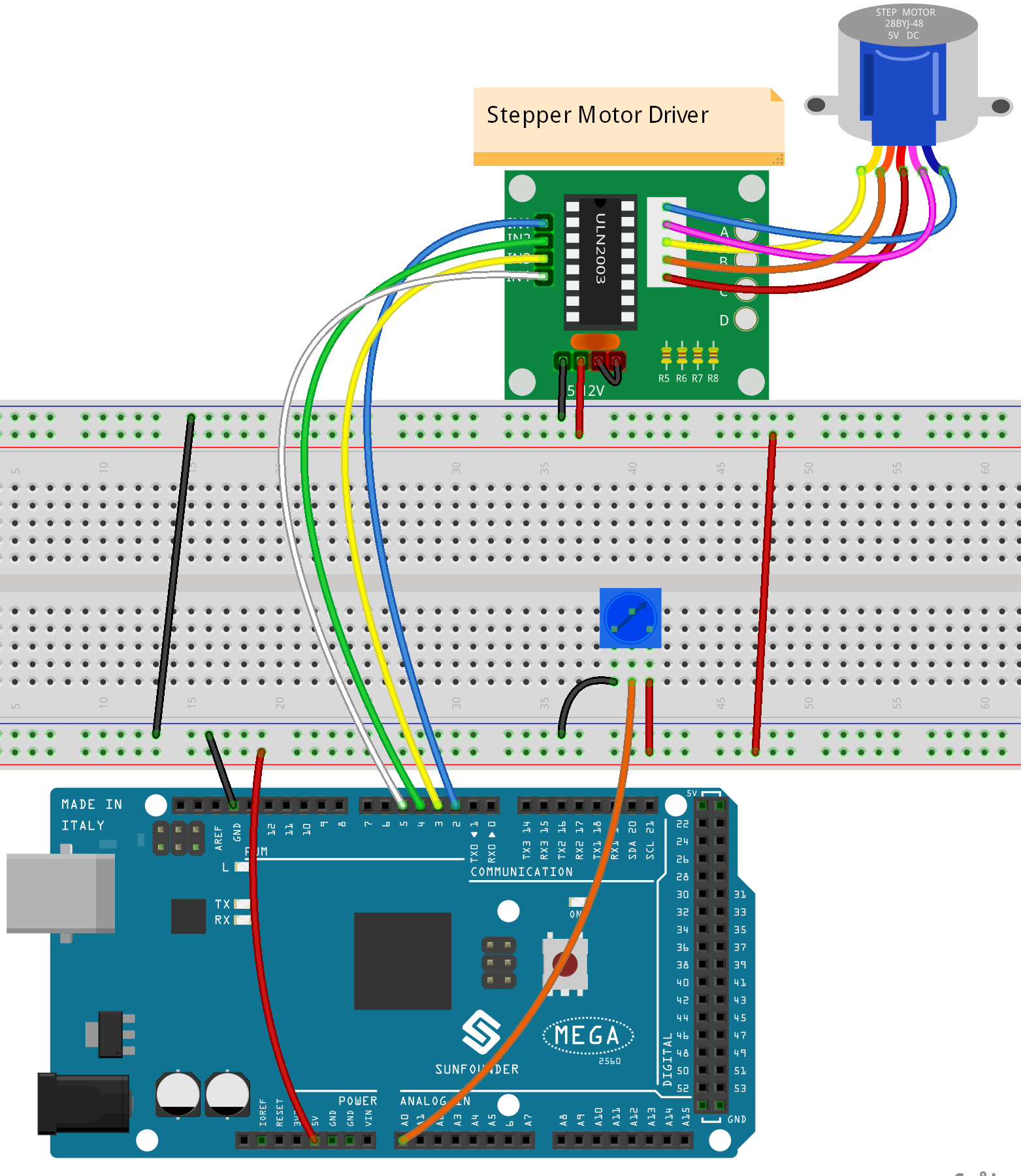
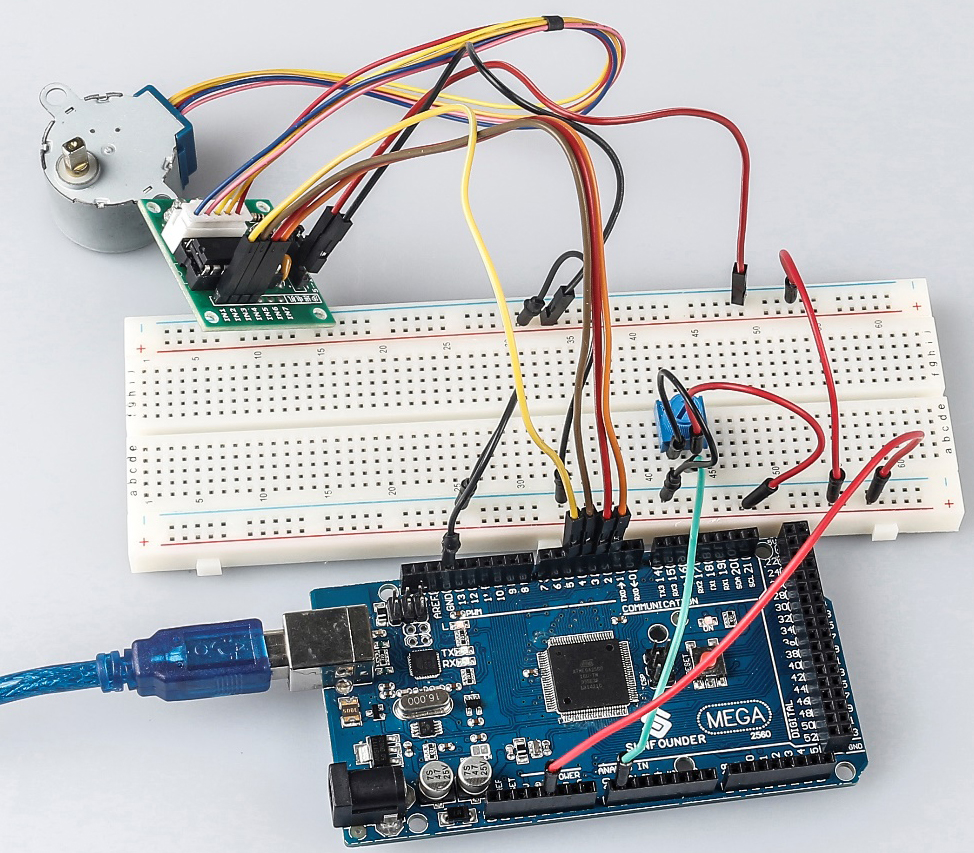
Step 1: Build the circuit
The wiring between Stepper Motor Driver board and Mega 2560 board:
Stepper Motor Driver |
Mega 2560 |
IN1 |
2 |
IN2 |
4 |
IN3 |
3 |
IN4 |
5 |
GND |
GND |
VCC |
5v |
Step 2: Open the code file.
Step 3: Select the Board and Port.
Step 4: Upload the sketch to the board.
Now, you should see the rocker arm of the stepper motor spin clockwise and counterclockwise alternately.
Code¶
Code Analysis¶
Initialize the stepper
#include <Stepper.h> //include a head file
//the steps of a circle
#define STEPS 2048
//set steps and the connection with MCU
Stepper stepper(STEPS, 2, 3, 4, 5);
//available to store previous value
int previous = 0;
Include a head file Stepper.h, set the steps to 100 and then initialize the stepper with a function stepper().
Stepper(steps, pin1, pin2, pin3, pin4): This function creates a new instance of the Stepper class that represents a particular stepper motor attached to your Arduino board.
steps: The number of steps in one revolution of your motor. If your
motor gives the number of degrees per step, divide that number into 360
to get the number of steps (e.g. 360 / 3.6 gives 100 steps). (int).
setSpeed() function
//speed of per minute
stepper.setSpeed(15); //set the motor speed in rotations per minute(RPMs)
setSpeed(rpms): Sets the motor speed in rotations per minute (RPMs). This function doesn’t make the motor turn, just sets the speed at which it will when you call step().
Parameters
rpms: the speed at which the motor should turn in rotations per minute - a positive number (long)
loop() function
void loop()
{
//get analog value
int val = analogRead(0); //Read the value of the potentiometer
//current reading minus the reading of history
stepper.step(val - previous); //Turn the motor in val-previous steps
//store as prevous value
previous = val; //the value of potentiometer assignment to variable previous
}
The main program is to read the value of A0 first and then set the number of steps of stepper motor rotation according to the value of A0.
step(steps): Turns the motor a specific number of steps, at a speed determined by the most recent call to setSpeed(). This function is blocking; that is, it will wait until the motor has finished moving to pass control to the next line in your sketch. For example, if you set the speed to, say, 1 RPM and called step(100) on a 100-step motor, this function would take a full minute to run. For better control, keep the speed high and only go a few steps with each call to step().
steps: the number of steps to turn the motor - positive to turn one direction, negative to turn the other (int).