注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
サーボモータ(SG90)

はじめに
サーボモータは、特定の角度や位置に回転できる装置です。ロボットアーム、ステアリングホイール、カメラのジンバルなどに使用されます。サーボモータには電源、接地、信号の3本のケーブルがあります。通常、赤色の電源ケーブルはArduinoボードの5Vピンに、黒または茶色の接地ケーブルはボードのGNDピンに、黄色またはオレンジの信号ケーブルはボードのPWMピンに接続します。
原理
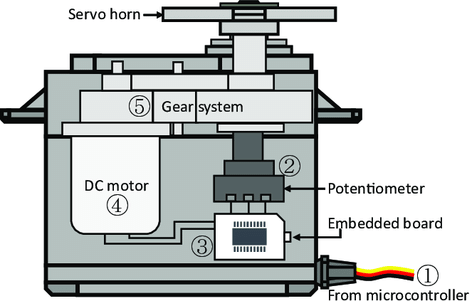
一般的なサーボは、ケース、軸、ギアシステム、ポテンショメータ、DCモータ、組み込みボードから構成されています。
動作は以下のようになります:マイクロコントローラがPWM信号をサーボに送信し、サーボ内の組み込みボードが信号ピンを通じてこれを受信します。それにより、モータがギアシステムを駆動し、減速後に軸を回転させます。サーボの軸とポテンショメータは連動しており、軸が回転するとポテンショメータも動き、組み込みボードに電圧信号を出力します。ボードはこの信号をもとに現在の位置と回転速度を決定し、指定された正確な位置で停止して保持します。
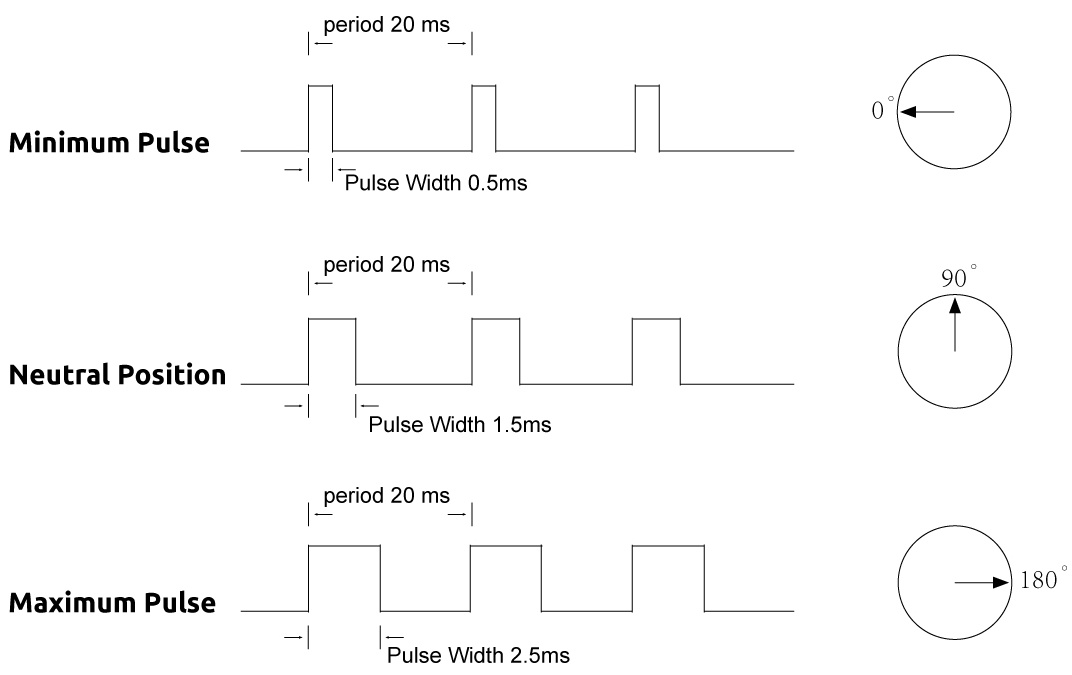
角度は、制御ワイヤーに印加されるパルスの持続時間によって決まります。これをパルス幅変調(PWM)と言います。サーボは20msごとにパルスを受け取ることを期待しています。パルスの長さによって、モータがどれだけ回転するかが決まります。例えば、1.5msのパルスでは、モータは90度の位置(中立位置)に回転します。1.5ms未満のパルスが送られた場合、サーボは中立点から反時計回りに何度か回転して、その位置で軸を保持します。1.5msよりも広いパルスが送られた場合は、逆の現象が起こります。最小幅と最大幅のパルスは、サーボごとに異なります。一般的に、最小幅のパルスは約0.5ms、最大幅のパルスは2.5msとなります。
使い方
使用する電子部品
Arduino Uno R4またはR3ボード * 1
サーボモータ * 1
ジャンパワイヤ
回路組立て

コード
コードの説明
ここでは、サーボモータを簡単に制御するための
Servoライブラリを読み込んでいます。また、サーボに接続されたピンとサーボの初期角度も定義しています。#include <Servo.h> const int servoPin = 9; // サーボピンの定義 int angle = 0; // 角度変数を0度で初期化 Servo servo; // Servoオブジェクトの作成
setup()関数はArduinoが起動したときに一度だけ実行されます。attach()関数を使用して、定義されたピンにサーボを接続します。void setup() { servo.attach(servoPin); }
メインループには2つの
forループがあります。最初のループは角度を0度から180度まで増加させ、次のループは180度から0度まで角度を減らします。servo.write(angle)コマンドでサーボを指定された角度にセットします。delay(15)はサーボが次の角度に移る前に15ミリ秒待機することで、走査動作の速度を制御します。void loop() { // scan from 0 to 180 degrees for (angle = 0; angle < 180; angle++) { servo.write(angle); delay(15); } // now scan back from 180 to 0 degrees for (angle = 180; angle > 0; angle--) { servo.write(angle); delay(15); } }
追加のアイディア
ポテンショメータを使用して、サーボの動きを制御します。ポテンショメータの回転により、サーボの角度を直接制御できます。