Nota
Ciao, benvenuto nella Community di appassionati di SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 insieme agli altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato a nuovi annunci di prodotti e anteprime.
Sconti speciali: Godi di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni speciali per le festività.
👉 Sei pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
3.1.4 Ventola Intelligente
Nota
A seconda della versione del tuo kit, identifica se hai ADC0834 o MCP3008 e procedi con la sezione corrispondente.
Introduzione
In questo progetto, utilizzeremo motori, pulsanti e termistori per realizzare una ventola intelligente manuale + automatica con velocità regolabile.
Componenti necessari
In questo progetto avremo bisogno dei seguenti componenti.
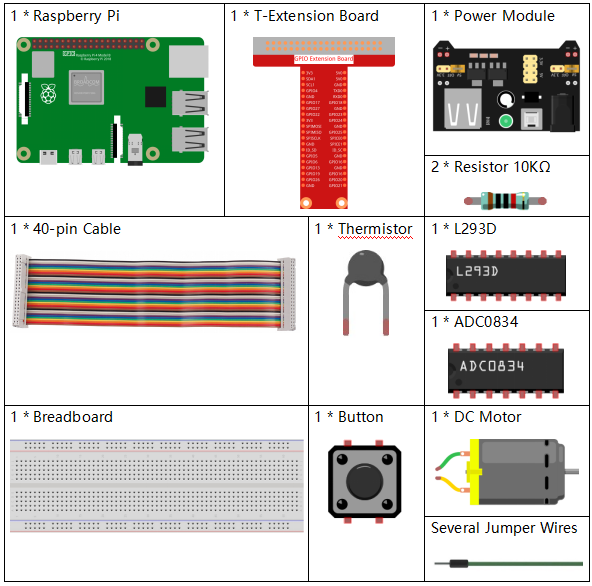
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK |
|---|---|---|
Kit Raphael |
337 |
Puoi anche acquistare i componenti separatamente dai link qui sotto.
INTRODUZIONE COMPONENTI |
LINK DI ACQUISTO |
|---|---|
- |
|
- |
|
- |
|
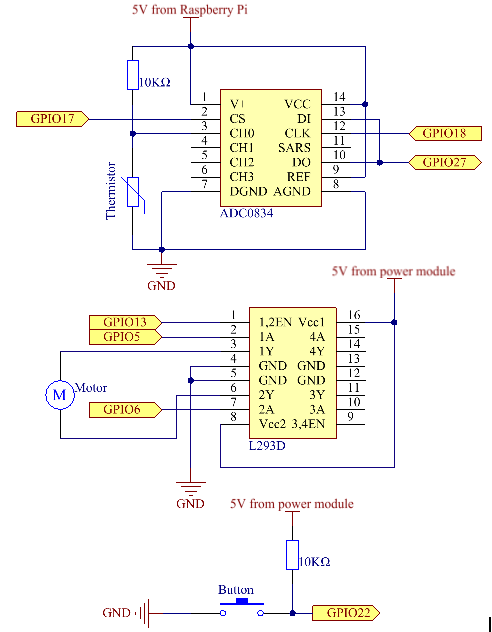
Schema elettrico
T-Board Name |
physical |
wiringPi |
BCM |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |
Procedura sperimentale
Passo 1: Costruisci il circuito.
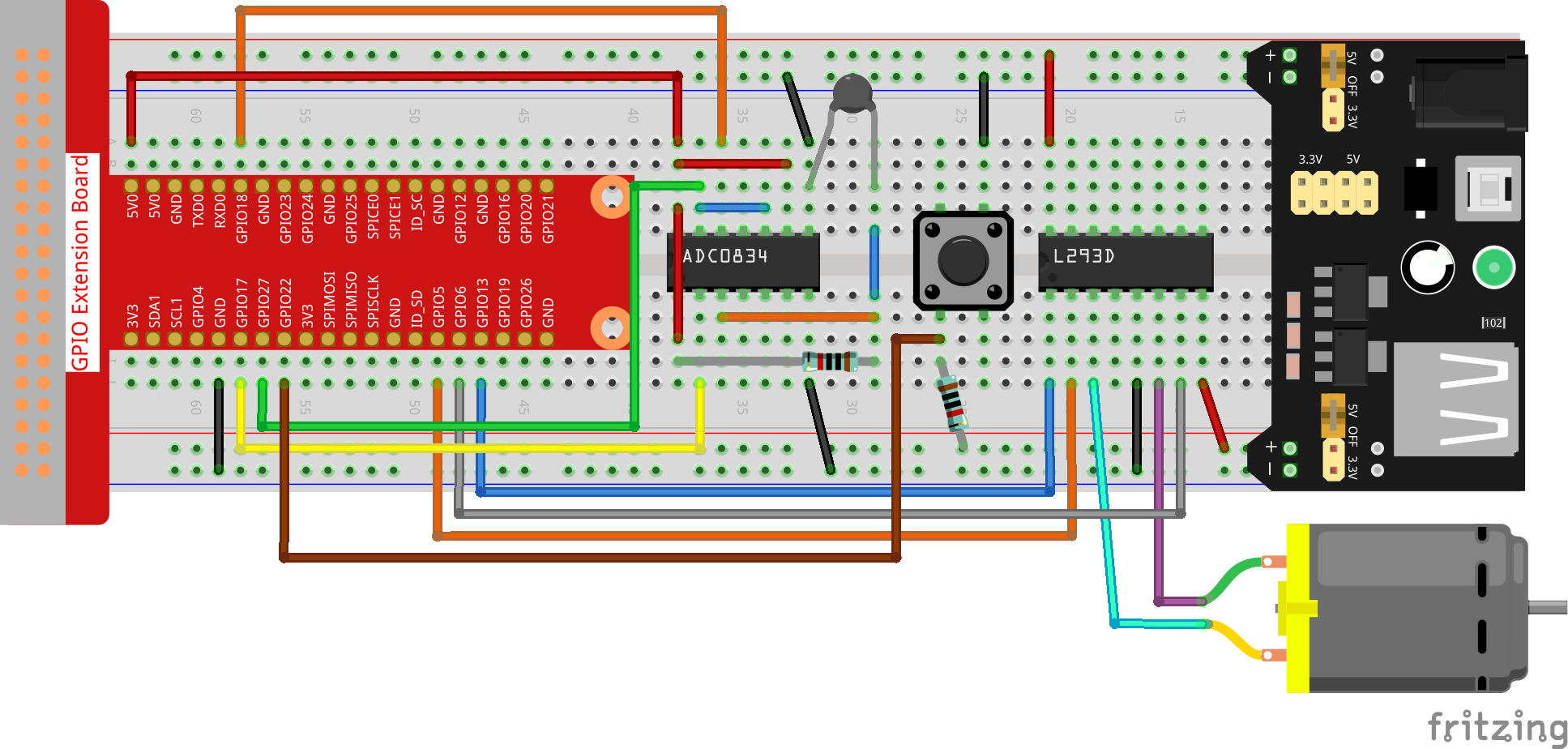
Nota
Il modulo di alimentazione può utilizzare una batteria da 9V con il connettore per batteria da 9V incluso nel kit. Inserisci il cappuccio del jumper del modulo di alimentazione nelle strisce del bus da 5V della breadboard.

Passo 2: Entra nella cartella del codice.
cd ~/raphael-kit/c/3.1.4/
Passo 3: Compila.
gcc 3.1.4_SmartFan.c -lwiringPi -lm
Passo 4: Esegui il file eseguibile sopra.
sudo ./a.out
Quando il codice viene eseguito, avvia la ventola premendo il pulsante. Ogni volta che premi, la velocità aumenta o diminuisce di un livello. Ci sono 5 livelli di velocità: 0~4. Quando impostato sul 4th livello di velocità e premi il pulsante, la ventola smette di funzionare con una velocità del vento pari a 0.
Quando la temperatura aumenta o diminuisce di oltre 2℃, la velocità aumenta o diminuisce automaticamente di 1 livello.
Nota
Se non funziona dopo l’esecuzione o compare un errore come: "wiringPi.h: Nessun file o directory", fai riferimento a Installa e Controlla wiringPi.
Codice
#include <wiringPi.h>
#include <stdio.h>
#include <softPwm.h>
#include <math.h>
typedef unsigned char uchar;
typedef unsigned int uint;
#define ADC_CS 0
#define ADC_CLK 1
#define ADC_DIO 2
#define MotorPin1 21
#define MotorPin2 22
#define MotorEnable 23
#define BtnPin 3
uchar get_ADC_Result(uint channel)
{
uchar i;
uchar dat1=0, dat2=0;
int sel = channel > 1 & 1;
int odd = channel & 1;
digitalWrite(ADC_CLK, 1);
delayMicroseconds(2);
digitalWrite(ADC_CLK, 0);
delayMicroseconds(2);
pinMode(ADC_DIO, OUTPUT);
digitalWrite(ADC_CS, 0);
// Start bit
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
//Single End mode
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// ODD
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,odd); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
//Select
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,sel); delayMicroseconds(2);
digitalWrite(ADC_CLK,1);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
for(i=0;i<8;i++)
{
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
pinMode(ADC_DIO, INPUT);
dat1=dat1<<1 | digitalRead(ADC_DIO);
}
for(i=0;i<8;i++)
{
dat2 = dat2 | ((uchar)(digitalRead(ADC_DIO))<<i);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
}
digitalWrite(ADC_CS,1);
pinMode(ADC_DIO, OUTPUT);
return(dat1==dat2) ? dat1 : 0;
}
int temperture(){
unsigned char analogVal;
double Vr, Rt, temp, cel, Fah;
analogVal = get_ADC_Result(0);
Vr = 5 * (double)(analogVal) / 255;
Rt = 10000 * (double)(Vr) / (5 - (double)(Vr));
temp = 1 / (((log(Rt/10000)) / 3950)+(1 / (273.15 + 25)));
cel = temp - 273.15;
Fah = cel * 1.8 +32;
int t=cel;
return t;
}
int motor(int level){
if(level==0){
digitalWrite(MotorEnable,LOW);
return 0;
}
if (level>=4){
level =4;
}
digitalWrite(MotorEnable,HIGH);
softPwmWrite(MotorPin1, level*25);
return level;
}
void setup(){
if(wiringPiSetup() == -1){ //when initialize wiring failed,print messageto screen
printf("setup wiringPi failed !");
return;
}
softPwmCreate(MotorPin1, 0, 100);
softPwmCreate(MotorPin2, 0, 100);
pinMode(MotorEnable,OUTPUT);
pinMode(BtnPin,INPUT);
pinMode(ADC_CS, OUTPUT);
pinMode(ADC_CLK, OUTPUT);
}
int main(void)
{
setup();
int currentState,lastState=0;
int level = 0;
int currentTemp,markTemp=0;
while(1){
currentState=digitalRead(BtnPin);
currentTemp=temperture();
if (currentTemp<=0){continue;}
if (currentState==1&&lastState==0){
level=(level+1)%5;
markTemp=currentTemp;
delay(500);
}
lastState=currentState;
if (level!=0){
if (currentTemp-markTemp<=-2){
level=level-1;
markTemp=currentTemp;
}
if (currentTemp-markTemp>=2){
level=level+1;
markTemp=currentTemp;
}
}
level=motor(level);
}
return 0;
}
Spiegazione del Codice
int temperture(){
unsigned char analogVal;
double Vr, Rt, temp, cel, Fah;
analogVal = get_ADC_Result(0);
Vr = 5 * (double)(analogVal) / 255;
Rt = 10000 * (double)(Vr) / (5 - (double)(Vr));
temp = 1 / (((log(Rt/10000)) / 3950)+(1 / (273.15 + 25)));
cel = temp - 273.15;
Fah = cel * 1.8 +32;
int t=cel;
return t;
}
La funzione temperture() converte i valori del termistore letti da ADC0834 in valori di temperatura. Vedi 2.2.2 Termistore per maggiori dettagli.
int motor(int level){
if(level==0){
digitalWrite(MotorEnable,LOW);
return 0;
}
if (level>=4){
level =4;
}
digitalWrite(MotorEnable,HIGH);
softPwmWrite(MotorPin1, level*25);
return level;
}
Questa funzione controlla la velocità di rotazione del motore. L’intervallo di livelli: 0-4 (il livello 0 ferma il motore). Ogni incremento di livello rappresenta una variazione del 25% della velocità del vento.
int main(void)
{
setup();
int currentState,lastState=0;
int level = 0;
int currentTemp,markTemp=0;
while(1){
currentState=digitalRead(BtnPin);
currentTemp=temperture();
if (currentTemp<=0){continue;}
if (currentState==1&&lastState==0){
level=(level+1)%5;
markTemp=currentTemp;
delay(500);
}
lastState=currentState;
if (level!=0){
if (currentTemp-markTemp<=-2){
level=level-1;
markTemp=currentTemp;
}
if (currentTemp-markTemp>=2){
level=level+1;
markTemp=currentTemp;
}
}
level=motor(level);
}
return 0;
}
La funzione main() contiene l’intero processo del programma come segue:
Leggi costantemente lo stato del pulsante e la temperatura corrente.
Ogni pressione aumenta il livello di +1 e allo stesso tempo, la temperatura viene aggiornata. L’intervallo di livelli è 1~4.
Quando la ventola funziona (il livello non è 0), la temperatura è sotto controllo. Un cambiamento di 2℃+ provoca l’aumento o la diminuzione del livello.
Il motore modifica la velocità di rotazione con il livello.