Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
4.1.7 Intelligenter Ventilator
Bemerkung
Abhängig von Ihrer Kit-Version identifizieren Sie bitte, ob Sie ADC0834 oder MCP3008 haben, und fahren Sie mit dem entsprechenden Abschnitt fort.
Einführung
In diesem Projekt werden wir Motoren, Tasten und Thermistoren verwenden, um einen manuellen + automatischen intelligenten Ventilator zu bauen, dessen Windgeschwindigkeit einstellbar ist.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
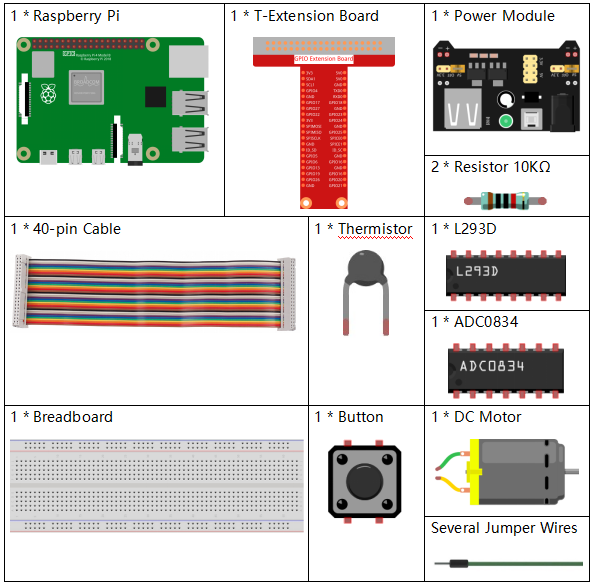
Es ist definitiv praktisch, ein komplettes Kit zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM KIT |
LINK |
|---|---|---|
Raphael Kit |
337 |
Sie können sie auch einzeln über die untenstehenden Links kaufen.
KOMPONENTENVORSTELLUNG |
KAUF-LINK |
|---|---|
- |
|
- |
|
- |
|
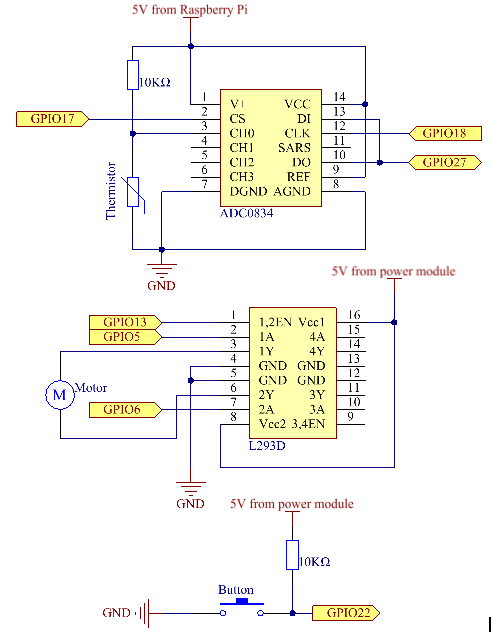
Schaltplan
T-Board Name |
physical |
wiringPi |
BCM |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |
Experimentelle Verfahren
Schritt 1: Bauen Sie den Schaltkreis auf.

Bemerkung
Das Strommodul kann eine 9-V-Batterie mit der im Kit enthaltenen 9-V-Batterieklemme verwenden. Stecken Sie die Jumperkappe des Strommoduls in die 5V-Stromschienen des Steckbretts.

Schritt 2: Gehen Sie in den Ordner des Codes.
cd ~/raphael-kit/python-pi5
Schritt 3: Ausführen.
sudo python3 4.1.10_SmartFan_zero.py
Während der Code ausgeführt wird, starten Sie den Ventilator, indem Sie die Taste drücken. Jedes Mal, wenn Sie drücken, wird eine Geschwindigkeitsstufe nach oben oder unten angepasst. Es gibt 5 Arten von Geschwindigkeitsstufen: 0~4. Wenn Sie auf die 4. Geschwindigkeitsstufe eingestellt sind und die Taste drücken, hört der Ventilator auf zu arbeiten und zeigt eine Windgeschwindigkeit von 0 an.
Sobald die Temperatur um mehr als 2°C steigt oder fällt, wird die Geschwindigkeit automatisch um eine Stufe schneller oder langsamer.
Code
Bemerkung
Sie können den untenstehenden Code Modifizieren/Zurücksetzen/Kopieren/Ausführen/Stoppen. Aber zuerst müssen Sie zum Quellcodepfad wie raphael-kit/python-pi5 gehen. Nach der Modifikation des Codes können Sie ihn direkt ausführen, um das Ergebnis zu sehen.
#!/usr/bin/env python3
from gpiozero import Motor, Button
from time import sleep
import ADC0834
import math
# Initialize GPIO pins for the button and motor control
BtnPin = Button(22)
motor = Motor(forward=5, backward=6, enable=13)
# Initialize the ADC0834 module for temperature sensing
ADC0834.setup()
# Initialize variables to track the motor speed level and temperatures
level = 0
currentTemp = 0
markTemp = 0
def temperature():
"""
Reads and calculates the current temperature from the sensor.
Returns:
float: The current temperature in Celsius.
"""
# Read analog value from the ADC0834 module
analogVal = ADC0834.getResult()
# Convert analog value to voltage and then to resistance
Vr = 5 * float(analogVal) / 255
Rt = 10000 * Vr / (5 - Vr)
# Calculate temperature in Celsius
temp = 1 / (((math.log(Rt / 10000)) / 3950) + (1 / (273.15 + 25)))
Cel = temp - 273.15
return Cel
def motor_run(level):
"""
Adjusts the motor speed based on the specified level.
Args:
level (int): Desired motor speed level.
Returns:
int: Adjusted motor speed level.
"""
# Stop the motor if the level is 0
if level == 0:
motor.stop()
return 0
# Cap the level at 4 for maximum speed
if level >= 4:
level = 4
# Set the motor speed
motor.forward(speed=float(level / 4))
return level
def changeLevel():
"""
Changes the motor speed level when the button is pressed and updates the reference temperature.
"""
global level, currentTemp, markTemp
print("Button pressed")
# Cycle through levels 0-4
level = (level + 1) % 5
# Update the reference temperature
markTemp = currentTemp
# Bind the button press event to changeLevel function
BtnPin.when_pressed = changeLevel
def main():
"""
Main function to continuously monitor and respond to temperature changes.
"""
global level, currentTemp, markTemp
# Set initial reference temperature
markTemp = temperature()
while True:
# Continuously read current temperature
currentTemp = temperature()
# Adjust motor level based on temperature difference
if level != 0:
if currentTemp - markTemp <= -2:
level -= 1
markTemp = currentTemp
elif currentTemp - markTemp >= 2:
if level < 4:
level += 1
markTemp = currentTemp
# Run the motor at the adjusted level
level = motor_run(level)
# Run the main function and handle KeyboardInterrupt
try:
main()
except KeyboardInterrupt:
# Stop the motor when the script is interrupted
motor.stop()
Code-Erklärung
Importiert Klassen zur Verwaltung eines Motors und einer Taste sowie die Sleep-Funktion für Pausen. Zusätzlich werden die ADC0834-Bibliothek für die Temperaturmessung und die Math-Bibliothek für mathematische Berechnungen importiert.
#!/usr/bin/env python3 from gpiozero import Motor, Button from time import sleep import ADC0834 import math
Richtet die Taste an GPIO-Pin 22 ein und konfiguriert den Motor mit spezifischen GPIO-Pins zur Steuerung. Initialisiert das ADC0834-Modul für die Temperaturmessung. Initialisiert auch Variablen zur Überwachung der Motorgeschwindigkeitsstufe und der Temperaturen.
# Initialize GPIO pins for the button and motor control BtnPin = Button(22) motor = Motor(forward=5, backward=6, enable=13) # Initialize the ADC0834 module for temperature sensing ADC0834.setup() # Initialize variables to track the motor speed level and temperatures level = 0 currentTemp = 0 markTemp = 0
Definiert eine Funktion zum Lesen und Berechnen der Temperatur vom Sensor, Umrechnung der Messwerte in Celsius.
def temperature(): """ Reads and calculates the current temperature from the sensor. Returns: float: The current temperature in Celsius. """ # Read analog value from the ADC0834 module analogVal = ADC0834.getResult() # Convert analog value to voltage and then to resistance Vr = 5 * float(analogVal) / 255 Rt = 10000 * Vr / (5 - Vr) # Calculate temperature in Celsius temp = 1 / (((math.log(Rt / 10000)) / 3950) + (1 / (273.15 + 25))) Cel = temp - 273.15 return Cel
Führt eine Funktion ein, um die Motorgeschwindigkeit entsprechend der angegebenen Stufe anzupassen.
def motor_run(level): """ Adjusts the motor speed based on the specified level. Args: level (int): Desired motor speed level. Returns: int: Adjusted motor speed level. """ # Stop the motor if the level is 0 if level == 0: motor.stop() return 0 # Cap the level at 4 for maximum speed if level >= 4: level = 4 # Set the motor speed motor.forward(speed=float(level / 4)) return level
Implementiert eine Funktion, um die Motorgeschwindigkeitsstufe manuell mit einer Taste zu ändern, und bindet diese Funktion an das Druckereignis der Taste.
def changeLevel(): """ Changes the motor speed level when the button is pressed and updates the reference temperature. """ global level, currentTemp, markTemp print("Button pressed") # Cycle through levels 0-4 level = (level + 1) % 5 # Update the reference temperature markTemp = currentTemp # Bind the button press event to changeLevel function BtnPin.when_pressed = changeLevel
Die Hauptfunktion, die entwickelt wurde, um die Motorgeschwindigkeit kontinuierlich an Temperaturschwankungen anzupassen, bleibt zu implementieren.
def main(): """ Main function to continuously monitor and respond to temperature changes. """ global level, currentTemp, markTemp # Set initial reference temperature markTemp = temperature() while True: # Continuously read current temperature currentTemp = temperature() # Adjust motor level based on temperature difference if level != 0: if currentTemp - markTemp <= -2: level -= 1 markTemp = currentTemp elif currentTemp - markTemp >= 2: if level < 4: level += 1 markTemp = currentTemp # Run the motor at the adjusted level level = motor_run(level)
Führt die Hauptfunktion aus und stellt sicher, dass der Motor stoppt, wenn das Skript unterbrochen wird.
# Run the main function and handle KeyboardInterrupt try: main() except KeyboardInterrupt: # Stop the motor when the script is interrupted motor.stop()