リモコン・カー¶
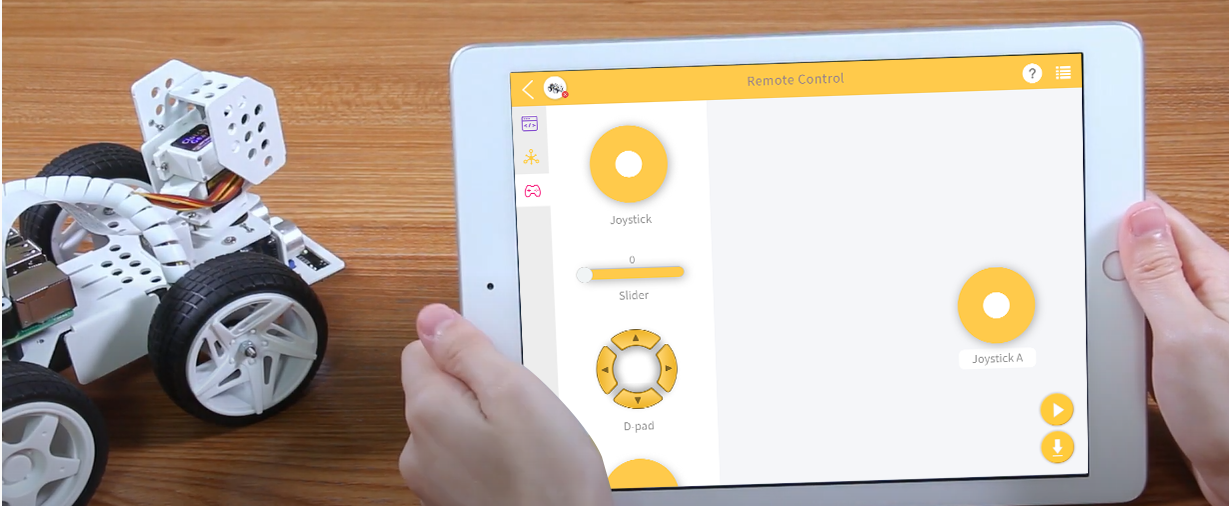
このプロジェクトでは画面上のジョイスティックを使用して PiCar-X をリモコン制御する方法を説明します。 Note: リモコン画面からジョイスティックをドラッグ&ドロップした後、「マップ」機能を使用して、ジョイスティックの X 軸と Y 軸の読み取り値を調整します。 リモコン機能の詳細については、次のリンクを参照してください。
ティップス
リモコン機能を使用するには、メインページの左側からリモコン画面を開きます。
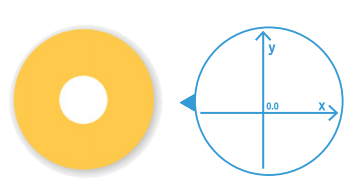
ジョイスティックをリモコン画面の中央領域にドラッグします。 中央の白い点をマウスで任意の方向に軽くドラッグすると、(X,Y) 座標が生成されます。 X 軸または Y 軸の範囲は、デフォルトで「-100」から「100」に設定されています。 ジョイスティックを左端にドラッグすると、X 値が「-100」になり、Y 値が「0」になります。

リモコン画面に部品を設定すると、上記のブロックを持つ新しいカテゴリのリモートが表示されます。 このブロックは、リモコン画面のジョイスティックの値を読み取ります。 ドロップダウン メニューをクリックして、Y 軸の読み取り値に切り替えることができます。
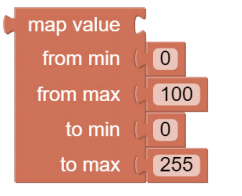
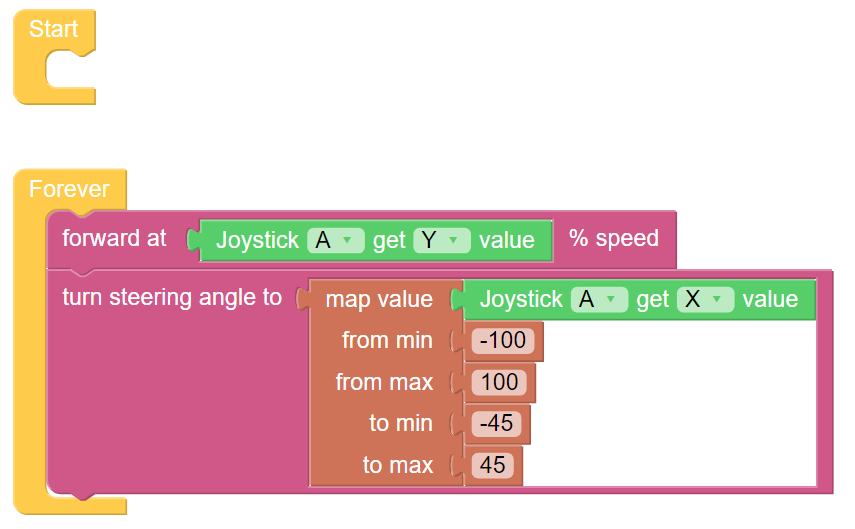
マップ値ブロックは、数値をある範囲から別の範囲に再マップ(変換)できます。 上の例のようにFromの範囲が 0 ~ 100 に設定されて、toの範囲が 0 〜 255の場合、入力値(map value)が 50 の場合入力範囲の 50%、つまり「50」になります。 変換後の範囲が 0 ~ 255 に設定されていますので出力は255の50%、つまり「127.5」になります。 これにより下の例「turn steering angle to」のようにジョイスティックの入力値(-100〜100)をハンドル(前輪)の向きの左45度〜右45度(-45〜45)に変換したりすることができます。
例:
注釈
次の例を参考にしてプログラムを作成してください。またチュートリアルを参照してください。How to Create a New Project?.
またはEzBlock Studioの Examples 画面から「 Remote Control 」を探し Run か Edit を直接クリックしてください。