PiCar-Xのキャリブレーション¶
PiCar-Xを初めて接続した後、キャリブレーションの手順があります。PiCar-X の取り付け時の偏差やサーボ自体の制限により一部のサーボ角度がわずかに傾いている可能性があるため調整することができます。
もちろん組み立てが完璧でキャリブレーションが必要ないと思われる場合はこの章をスキップできます。
注釈
使用中にロボットの再キャリブレーションを行う場合は、以下の手順に従ってください。
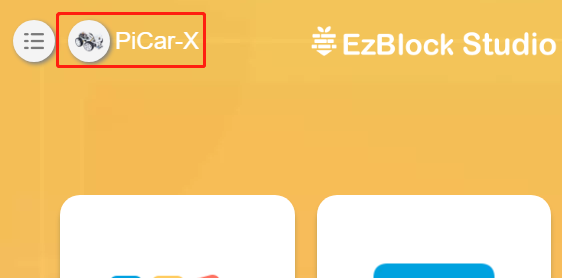
左上のコネクトアイコンをクリックすると、商品の詳細ページが表示されます。
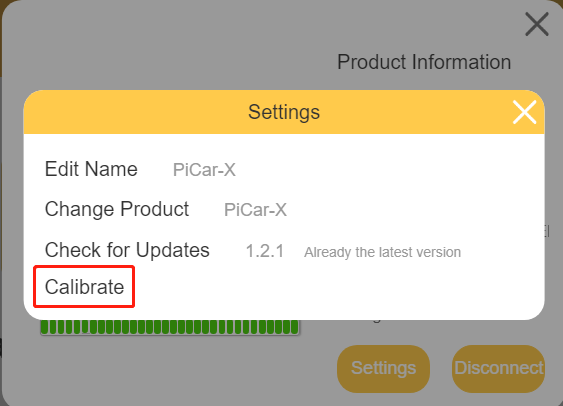
Settings ボタンをクリックします。

このページでは、製品名、製品タイプの変更、アプリのバージョン表示、ロボットのキャリブレーションを行うことができます。 Calibrate をクリックすると、キャリブレーションのページに移動します。
キャリブレーションの手順は以下の通りです:
キャリブレーションのページに移動すると、どこでキャリブレーションを行うかを示す2つのプロンプトポイントが表示されます。.
注釈
キャリブレーションは、微小な調整作業です。ボタンを限界までクリックしてもパーツがズレている場合は、一度パーツを外して組み立て直すことをお勧めします。
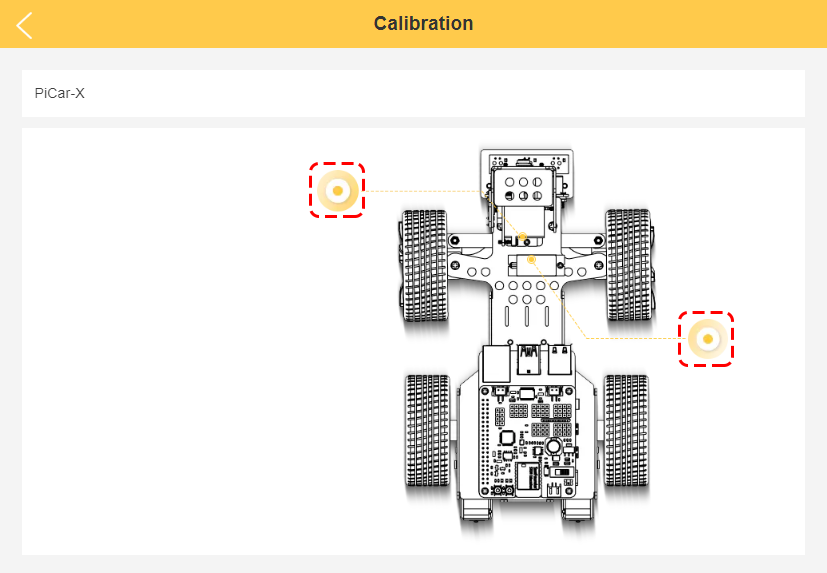
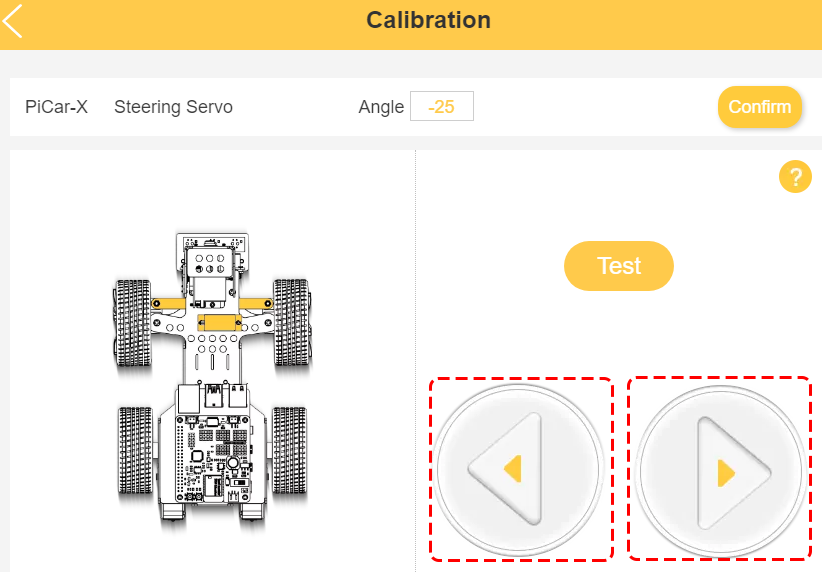
左側のプロンプトポイントをクリックすると、PiCar-Xのパン・チルト(カメラ部)のキャリブレーションを行います。 右側の2組のボタンを使って、パン・チルトの向きをゆっくり調整したり、その角度を確認することもできます。 調整が完了したら、 Confirm をクリックします。
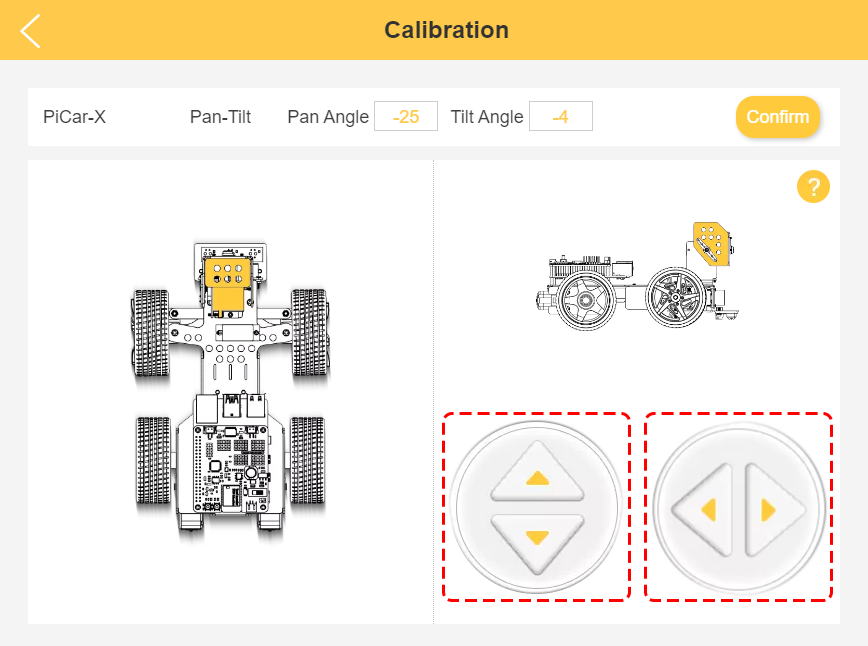
前輪の向きをキャリブレーションするには、右側のプロンプトポイントをクリックします。右側の2つのボタンを使って、前輪がまっすぐ前を向くようにします。調整が完了したら、Confirm をクリックします。