顔検出¶
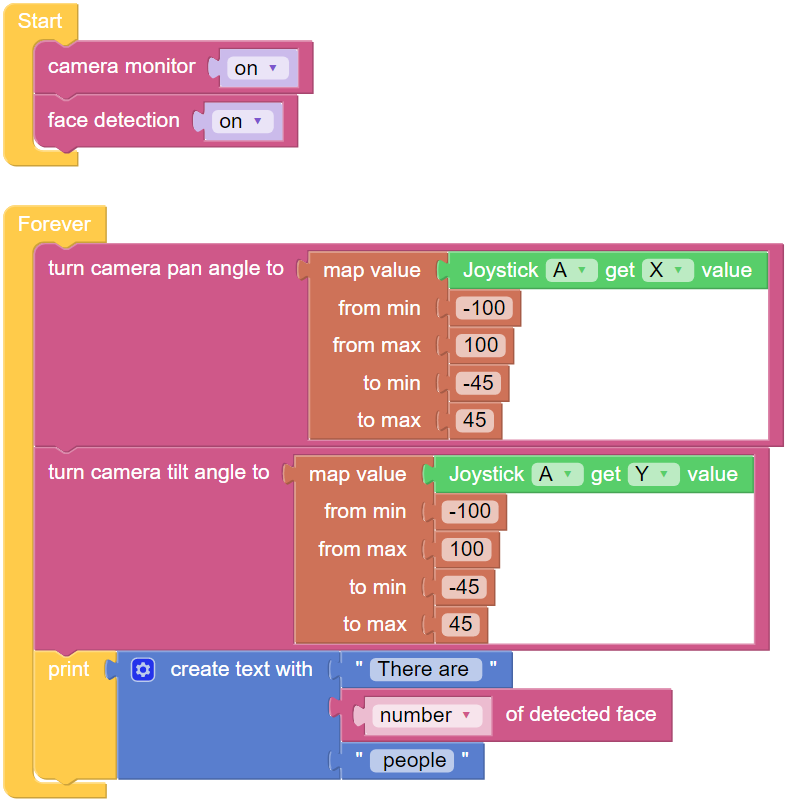
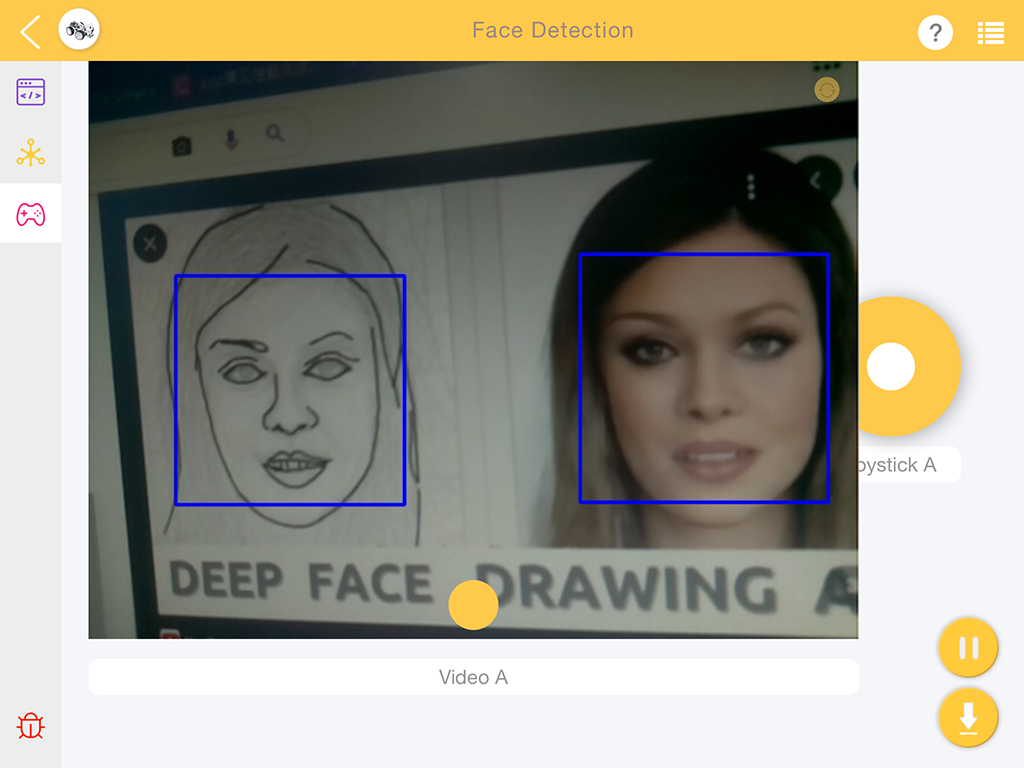
PiCar-Xには、色検出に加えて顔検出機能も搭載されています。 次の例では、リモートコントロール画面のジョイスティックを使用してカメラの方向を変え、カメラが捉えた人の顔の数をデバッグ・モニターに表示します。
ビデオ・モニターの使用方法の詳細については、こちらの Ezblock ビデオに関するチュートリアルを参照してください: How to Use the Video Function?。
ティップス
face detection 機能を on に設定して、顔検出を有効にします。
以下の2つのブロックは、リモコン・カー のチュートリアルで PiCar-Xのハンドル操作をするのと同様に、カメラのパン(左右)とチルト(上下)の向きを調整するために使用されます。 値が増加すると、カメラは右または上に回転し、値が減少するとカメラは右または下に回転します。

画像検出結果は detected face ブロックを介して提供されます。 ドロップダウンメニュー・オプションを使用して、画像検出関数からの結果の座標、サイズ、または数のいずれを読み出すかを選択します。
create text with ブロックを使用して、テキスト と 検出された顔 データの組み合わせを出力します。
例:
注釈
次の例を参考にしてプログラムを作成してください。またチュートリアルを参照してください。How to Create a New Project?.
またはEzBlock Studioの Examples 画面から「 Face Detection 」を探し Run か Edit を直接クリックしてください。