Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [here] und treten Sie heute bei!
1. Kalibrierung des PiCar-X
Kalibrierung von Motoren & Servo
Einige Servowinkel können aufgrund möglicher Abweichungen bei der Montage des PiCar-X oder aufgrund der Einschränkungen der Servos selbst leicht geneigt sein, daher können Sie diese kalibrieren.
Natürlich können Sie dieses Kapitel überspringen, wenn Sie denken, dass die Montage perfekt ist und keine Kalibrierung erfordert.
Führen Sie
calibration.pyaus.cd ~/picar-x/example sudo python3 1.cali_servo_motor.py
Nachdem Sie den Code ausgeführt haben, wird folgende Oberfläche im Terminal angezeigt.

Die Taste
Rwird verwendet, um zu testen, ob die 3 Servos einwandfrei funktionieren.Drücken Sie die Zahlentaste
1, um den Servo des Vorderrads auszuwählen, und dann die TastenW/S, damit das Vorderrad so gerade wie möglich aussieht, ohne nach links oder rechts abzuweichen.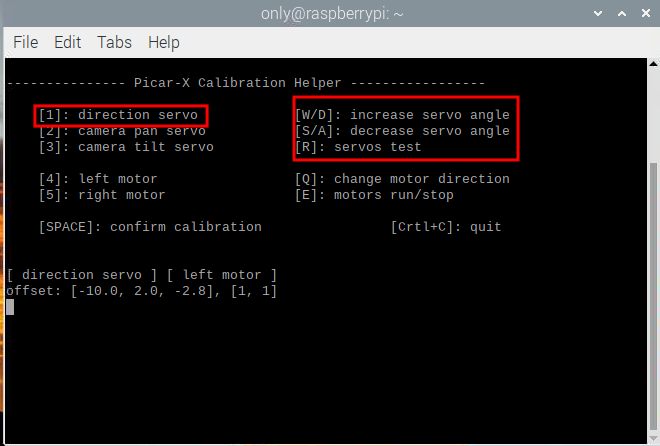
Drücken Sie die Zahlentaste
2, um den Pan servo auszuwählen, dann drücken Sie die TastenW/S, damit die Schwenk-/Neigeplattform geradeaus schaut und nicht nach links oder rechts kippt.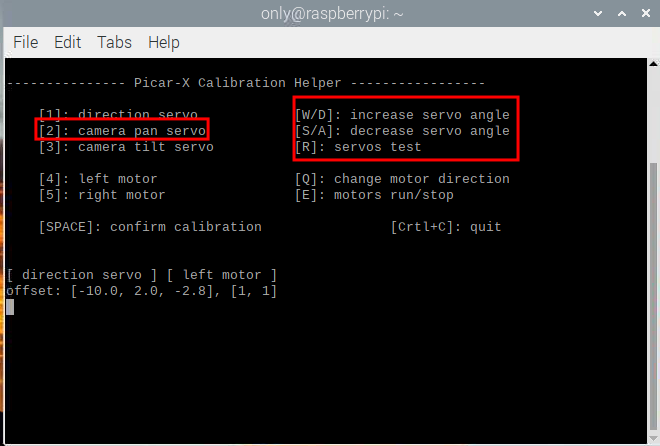
Drücken Sie die Zahlentaste
3, um den tilt servo auszuwählen, dann drücken Sie die TastenW/S, damit die Schwenk-/Neigeplattform geradeaus schaut und nicht nach oben oder unten kippt.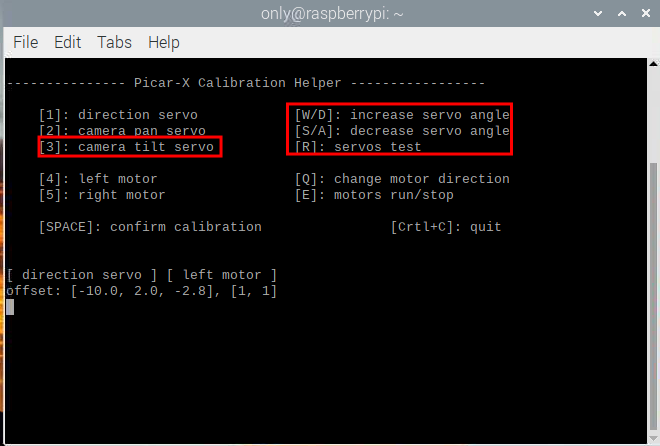
Da die Verkabelung der Motoren bei der Installation umgekehrt sein könnte, können Sie
Edrücken, um zu testen, ob das Auto normal vorwärtsfahren kann. Wenn nicht, verwenden Sie die Zahlentasten4und5, um die linken und rechten Motoren auszuwählen, und dann drücken Sie die TasteQ, um die Drehrichtung zu kalibrieren.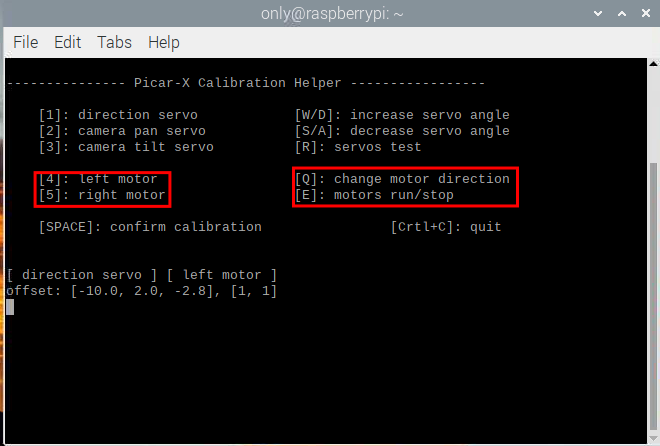
Wenn die Kalibrierung abgeschlossen ist, drücken Sie die
Spacebar, um die Kalibrierungsparameter zu speichern. Es erscheint eine Aufforderung,yzur Bestätigung einzugeben, und dann drücken SieCtrl+C, um das Programm zu beenden und die Kalibrierung abzuschließen.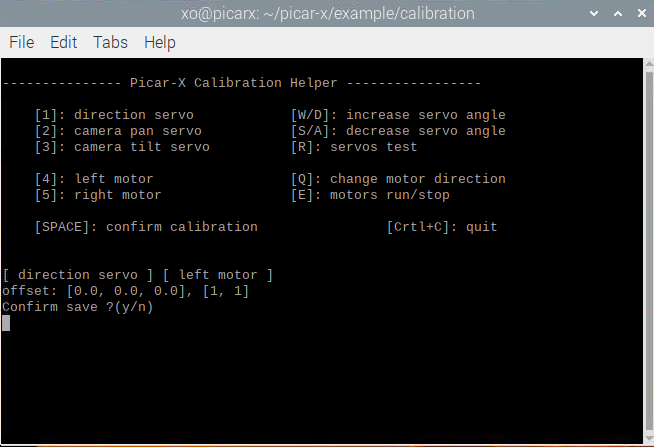
Kalibrierung des Graustufenmoduls
Aufgrund unterschiedlicher Umgebungsbedingungen und Beleuchtungssituationen sind die voreingestellten Parameter für das Graustufenmodul möglicherweise nicht optimal. Sie können diese Einstellungen über dieses Programm feinjustieren, um bessere Ergebnisse zu erzielen.
Legen Sie einen Streifen schwarzes Isolierband, etwa 15 cm lang, auf einen hellen Boden. Zentrieren Sie Ihr PiCar-X, sodass es über dem Band steht. Dabei sollte der mittlere Sensor des Graustufenmoduls direkt über dem Band sein, während die beiden flankierenden Sensoren über der helleren Oberfläche schweben sollten.
Führe den Code aus.
cd ~/picar-x/example sudo python3 1.cali_grayscale.py
Nachdem Sie den Code ausgeführt haben, wird folgende Oberfläche im Terminal angezeigt.
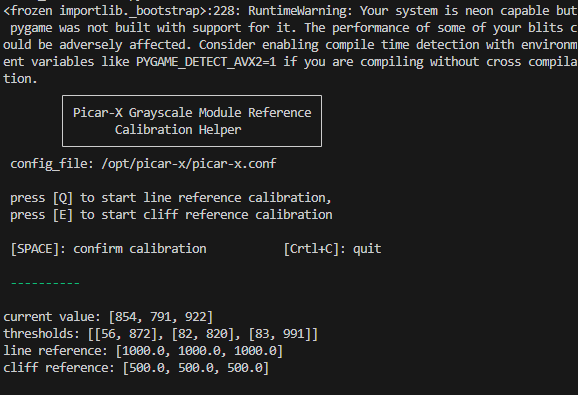
Drücken Sie die Taste „Q“, um die Kalibrierung des Graustufenmoduls zu starten. Sie werden dann beobachten, wie das PiCar-X geringfügige Bewegungen nach links und rechts macht. Während dieses Vorgangs sollten alle drei Sensoren mindestens einmal über das Isolierband streichen.
Zusätzlich werden Sie drei Paare von deutlich unterschiedlichen Werten im Abschnitt „Schwellenwert“ bemerken, während „Linienreferenz“ zwei Zwischenwerte anzeigt, von denen jeder den Durchschnitt eines dieser Paare darstellt.

Suspendieren Sie anschließend das PiCar-X in der Luft (oder positionieren Sie es über einer Klippenkante) und drücken Sie die Taste „E“. Sie werden beobachten, dass auch die „Klippenreferenz“-Werte entsprechend aktualisiert werden.
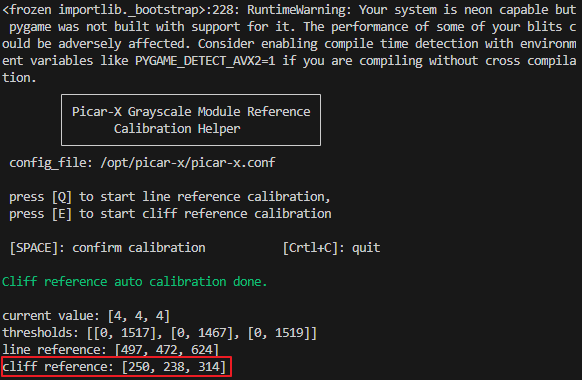
Sobald Sie verifiziert haben, dass alle Werte korrekt sind, drücken Sie die „Leertaste“, um die Daten zu speichern. Sie können das Programm dann durch Drücken von Strg+C beenden.