Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [here] und treten Sie heute bei!
12. Durch die App gesteuert
Der SunFounder-Controller wird verwendet, um auf Raspberry Pi/Pico basierende Roboter zu steuern.
Die App integriert Schaltflächen, Schalter, Joysticks, D-Pads, Schieberegler und Gashebel-Widgets; digitale Anzeigen, Ultraschallradar, Graustufenerkennung und Geschwindigkeitsmesser-Eingabewidgets.
Es gibt 17 Bereiche A-Q, in denen Sie verschiedene Widgets platzieren können, um Ihren eigenen Controller anzupassen.
Zusätzlich bietet diese Anwendung einen Live-Videostreaming-Dienst.
Lassen Sie uns einen PiCar-X-Controller mit dieser App anpassen.
Wie geht das?
Installieren Sie das Modul
sunfounder-controller.Die Module
robot-hat,vilibundpicar-xmüssen zuerst installiert werden, Details siehe: Alle Module installieren (Wichtig).cd ~ git clone https://github.com/sunfounder/sunfounder-controller.git cd ~/sunfounder-controller sudo python3 setup.py install
Führen Sie den Code aus.
cd ~/picar-x/example sudo python3 12.app_control.py
Installieren Sie SunFounder Controller aus dem App Store(iOS) oder Google Play(Android).
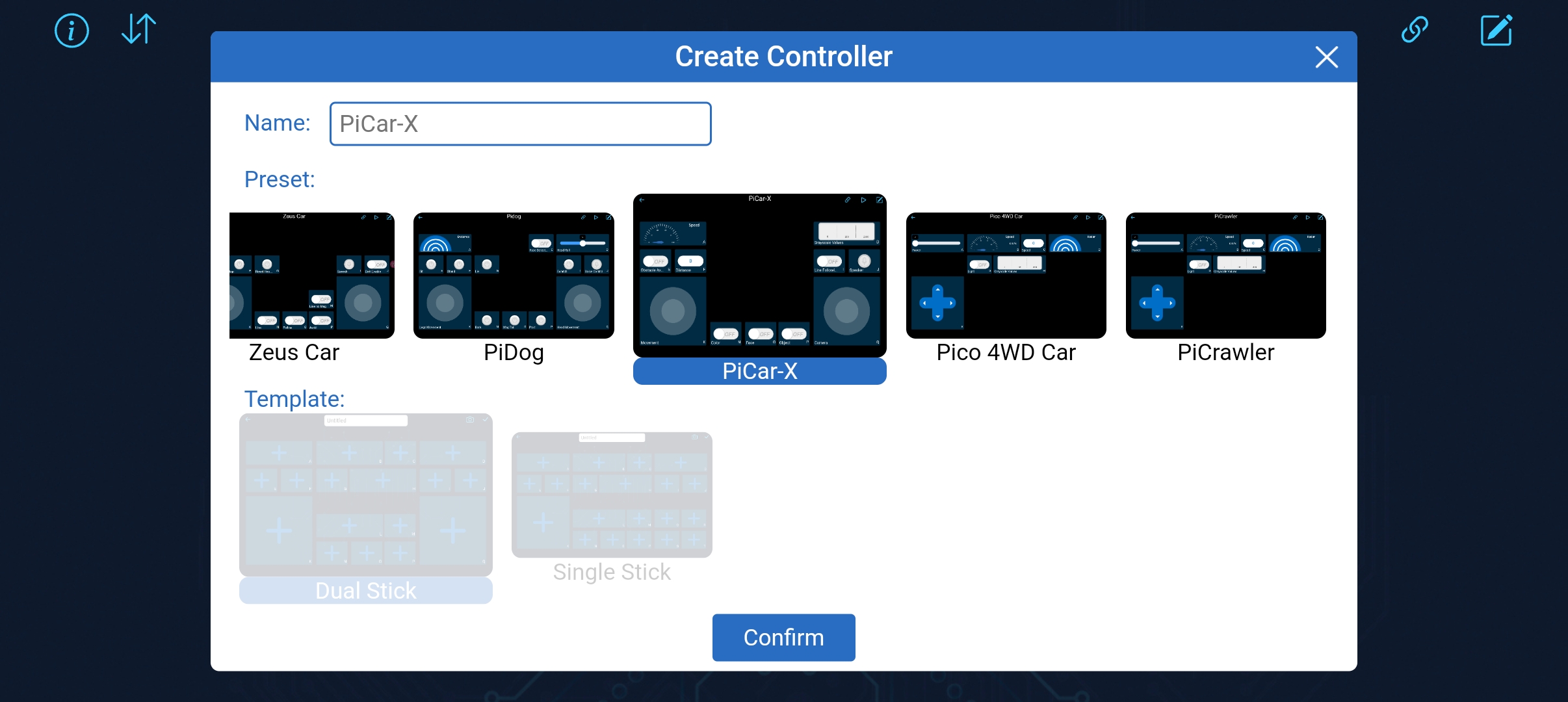
Öffnen und erstellen Sie einen neuen Controller.
Erstellen Sie einen neuen Controller, indem Sie im SunFounder Controller-App auf das + Zeichen klicken.

Im Abschnitt ‚Voreinstellungen‘ gibt es voreingestellte Controller für einige Produkte, die Sie bei Bedarf verwenden können. Hier wählen wir PiCar-X aus.
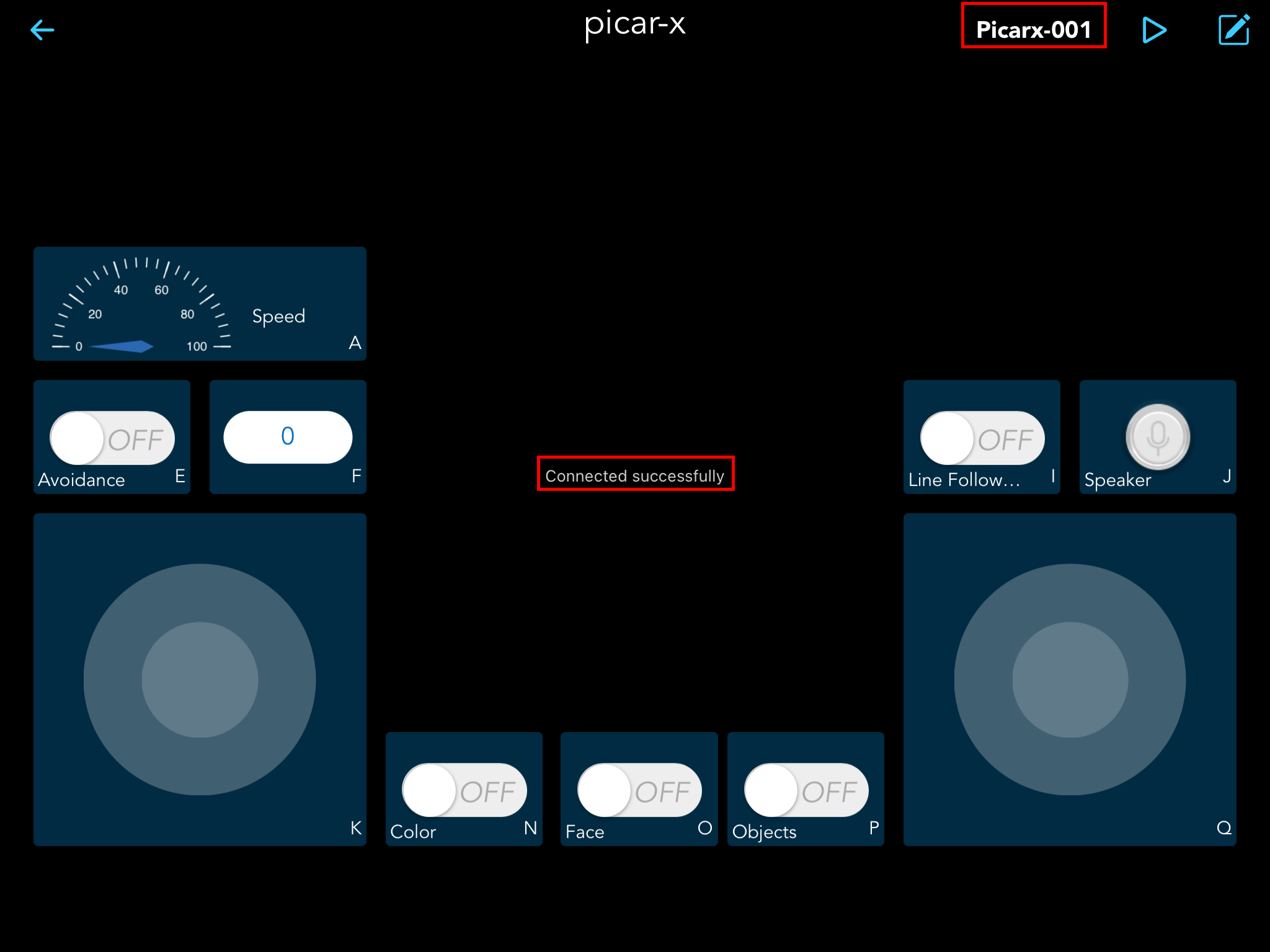
Verbinden Sie sich mit PiCar-x.
Wenn Sie auf den Connect-Button klicken, wird automatisch nach Robotern in der Nähe gesucht. Der Name ist in
picarx_control.pydefiniert und muss ständig laufen.
Sobald Sie auf den Produktnamen klicken, erscheint die Meldung „Connected Successfully“ und der Produktname wird in der oberen rechten Ecke angezeigt.
Bemerkung
Sie müssen sicherstellen, dass Ihr mobiles Gerät mit demselben LAN wie PiCar-X verbunden ist.
Wenn es nicht automatisch sucht, können Sie auch manuell die IP eingeben, um sich zu verbinden.

Verwenden Sie diesen Controller.
Klicken Sie auf den Run-Button, um den Controller zu starten, Sie sehen das Filmmaterial des Autos und können jetzt Ihr PiCar-X mit diesen Widgets steuern.

Hier sind die Funktionen der Widgets.
A: Zeigt die aktuelle Geschwindigkeit des Autos an.
E: Schaltet die Hindernisvermeidungsfunktion ein.
I: Schaltet die Linienverfolgungsfunktion ein.
J: Spracherkennung, halten Sie dieses Widget gedrückt, um zu sprechen, und es zeigt die erkannte Stimme an, wenn Sie es loslassen. Wir haben die 4 Befehle
forward,backard,leftundrightim Code festgelegt, um das Auto zu steuern.K: Steuert Vorwärts-, Rückwärts-, Links- und Rechtsbewegungen des Autos.
Q: Dreht den Kopf (Kamera) nach oben, unten, links und rechts.
N: Schaltet die Farberkennungsfunktion ein.
O: Schaltet die Gesichtserkennungsfunktion ein.
P: Schaltet die Objekterkennungsfunktion ein, sie kann fast 90 Arten von Objekten erkennen, für die Liste der Modelle, siehe: https://github.com/sunfounder/vilib/blob/master/workspace/coco_labels.txt.