Nota
Ciao, benvenuto nella community SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino e ESP32 insieme ad altri appassionati.
Perché Unirsi?
Supporto Esperto: Risolvi problemi post-vendita e affronta sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni l’accesso anticipato agli annunci di nuovi prodotti e alle anteprime esclusive.
Sconti Speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni e Giveaway Festivi: Partecipa a giveaway e promozioni durante le festività.
👉 Sei pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
3.5 - Piccolo Ventilatore
Ora utilizziamo il TA6586 per pilotare il motore DC e farlo ruotare in senso orario e antiorario. Poiché il motore DC richiede una corrente relativamente alta, per motivi di sicurezza, qui utilizziamo un modulo di alimentazione per fornire energia al motore.
Componenti Necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un intero kit, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK PER L’ACQUISTO |
|---|---|---|
Kepler Kit |
450+ |
Puoi anche acquistarli separatamente dai link qui sotto.
SN |
INTRODUZIONE COMPONENTE |
QUANTITÀ |
LINK PER L’ACQUISTO |
|---|---|---|---|
1 |
1 |
||
2 |
Cavo Micro USB |
1 |
|
3 |
1 |
||
4 |
Diversi |
||
5 |
1 |
||
6 |
1 |
||
7 |
1 |
||
8 |
Power Pack |
1 |
|
9 |
Portabatteria |
1 |
Schema Elettrico
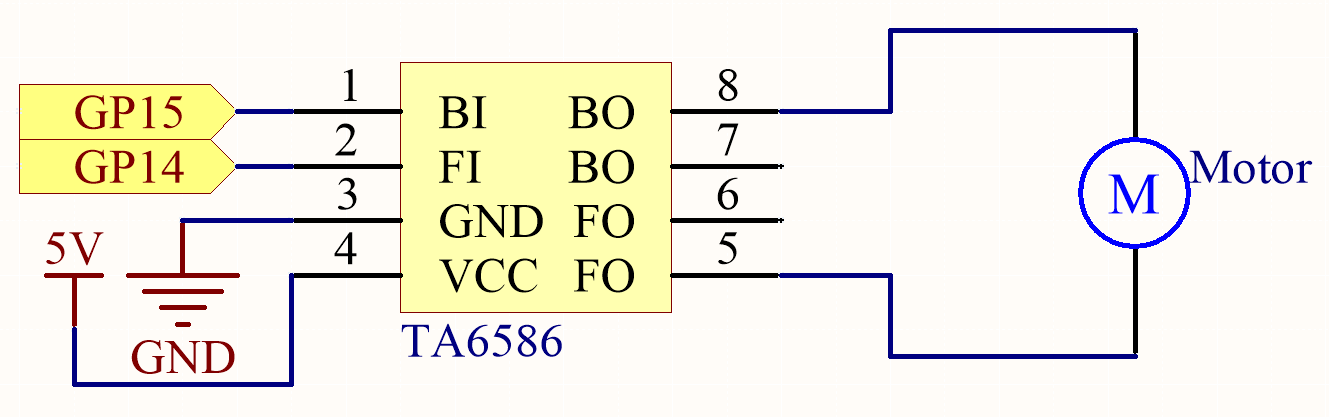
Cablaggio
Nota
Poiché i motori DC richiedono una corrente elevata, utilizziamo qui un modulo di caricamento Li-po per alimentare il motore per motivi di sicurezza.
Assicurati che il modulo di caricamento Li-po sia collegato come mostrato nello schema. In caso contrario, un cortocircuito potrebbe danneggiare la batteria e il circuito.

Codice
Nota
Puoi aprire il file
3.5_small_fan.inonel percorsokepler-kit-main/arduino/3.5_small_fan.Oppure copia questo codice nell”Arduino IDE.
Non dimenticare di selezionare la scheda (Raspberry Pi Pico) e la porta corretta prima di cliccare sul pulsante Upload.
Una volta che il programma è in esecuzione, il motore ruoterà avanti e indietro in un modello regolare.
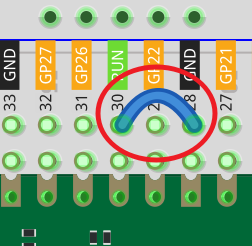
Nota
Se non riesci a caricare nuovamente il codice, questa volta devi collegare il pin RUN sul Pico W con un filo al GND per resettarlo, e poi scollegare questo filo per eseguire nuovamente il codice.
Questo perché il motore sta operando con troppa corrente, il che potrebbe causare la disconnessione del Pico W dal computer.