Nota
Ciao, benvenuto nella Community di appassionati di SunFounder Raspberry Pi, Arduino e ESP32 su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino e ESP32 insieme ad altri appassionati.
Perché unirti?
Supporto esperto: Risolvi problemi post-vendita e affronta sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e anteprime.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e giveaway: Partecipa a promozioni festive e concorsi a premi.
👉 Pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
3.7 - Servo Oscillante
In questo kit, oltre al LED e al cicalino passivo, c’è anche un dispositivo controllato da segnale PWM: il Servo.
Il Servo è un dispositivo di servocomando di posizione (angolo), adatto a quei sistemi di controllo che richiedono variazioni angolari costanti e possono essere mantenute. È ampiamente utilizzato nei giocattoli radiocomandati di fascia alta, come aerei, modelli di sottomarini e robot radiocomandati.
Ora, prova a far oscillare il servo!
Componenti Necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK PER L’ACQUISTO |
|---|---|---|
Kepler Kit |
450+ |
Puoi anche acquistarli separatamente dai link qui sotto.
SN |
INTRODUZIONE COMPONENTE |
QUANTITÀ |
LINK PER L’ACQUISTO |
|---|---|---|---|
1 |
1 |
||
2 |
Cavo Micro USB |
1 |
|
3 |
1 |
||
4 |
Diversi |
||
5 |
1 |
Schema
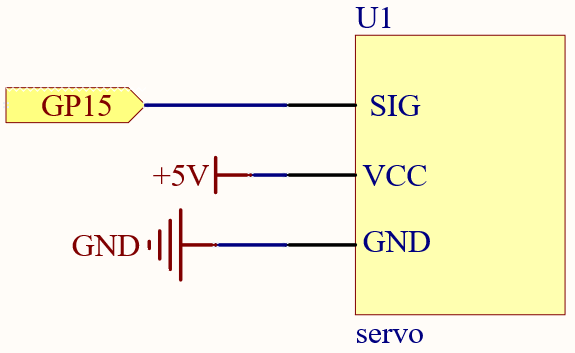
Cablaggio
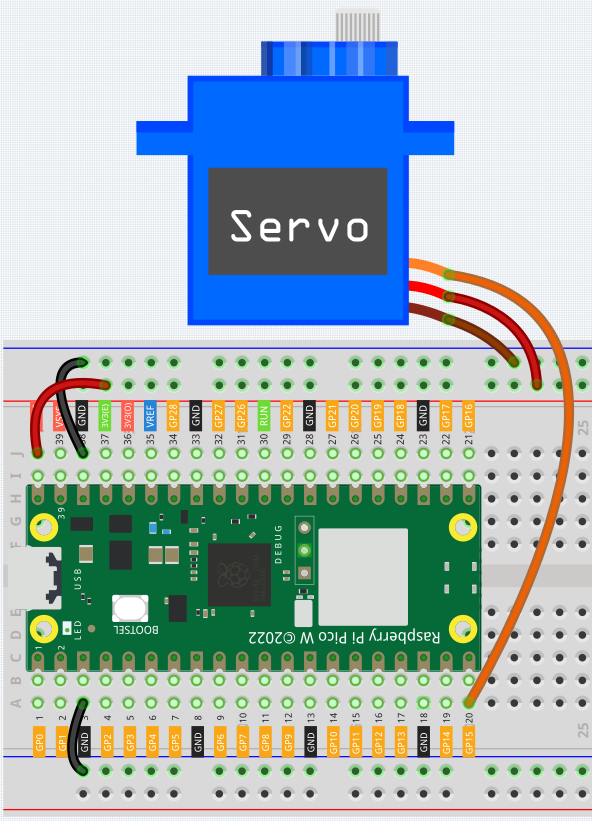
Il filo arancione è il segnale e va collegato a GP15.
Il filo rosso è VCC e va collegato a VBUS (5V).
Il filo marrone è GND e va collegato a GND.
Codice
Nota
Puoi aprire il file
3.7_swinging_servo.inonel percorsokepler-kit-main/arduino/3.7_swinging_servo.Oppure copia questo codice nell”Arduino IDE.
Non dimenticare di selezionare la scheda (Raspberry Pi Pico) e la porta corretta prima di cliccare sul pulsante Upload.
Quando il programma è in esecuzione, possiamo vedere il braccio del servo oscillare avanti e indietro da 0° a 180°.
Come funziona?
Richiamando la libreria Servo.h, puoi controllare facilmente il servo.
#include <Servo.h>
Funzioni della Libreria
Servo
Crea un oggetto Servo per controllare un servo.
uint8_t attach(int pin);
Trasforma un pin in un driver per servo. Richiama pinMode. Restituisce 0 in caso di errore.
void detach();
Rilascia un pin dal controllo del servo.
void write(int value);
Imposta l’angolo del servo in gradi, da 0 a 180.
int read();
Restituisce il valore impostato con l’ultima chiamata a write().
bool attached();
Restituisce 1 se il servo è attualmente collegato.