Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder para Raspberry Pi, Arduino y ESP32 en Facebook. Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirse?
Soporte Experto: Resuelve problemas posventa y desafíos técnicos con ayuda de nuestra comunidad y equipo.
Aprende y Comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Previsualizaciones Exclusivas: Obtén acceso anticipado a anuncios de nuevos productos y adelantos.
Descuentos Especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones Festivas y Sorteos: Participa en sorteos y promociones durante festividades.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy.
6.3 Seguimiento de Movimiento de 6 Ejes
El MPU-6050 es un dispositivo de seguimiento de movimiento de 6 ejes (que combina un giroscopio de 3 ejes y un acelerómetro de 3 ejes).
Un acelerómetro es una herramienta que mide la aceleración propia. Por ejemplo, un acelerómetro en reposo en la superficie de la Tierra medirá una aceleración debido a la gravedad terrestre, apuntando hacia arriba (por definición) con un valor aproximado de g ≈ 9.81 m/s².
Los acelerómetros tienen múltiples aplicaciones en la industria y la ciencia, como en sistemas de navegación inercial para aeronaves y misiles, y para mantener las imágenes verticales en tabletas y cámaras digitales, entre otros.
Los giroscopios se utilizan para medir la orientación y la velocidad angular de un dispositivo. Sus aplicaciones incluyen sistemas antivuelco y de airbags para automóviles, sistemas de detección de movimiento para dispositivos inteligentes, sistemas de estabilización de actitud para drones, entre otros.
Componentes Necesarios
Para este proyecto, necesitaremos los siguientes componentes.
Es muy conveniente adquirir un kit completo; aquí tienes el enlace:
Nombre |
ELEMENTOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Kepler |
450+ |
También puedes comprarlos por separado en los enlaces a continuación.
SN |
COMPONENTE |
CANTIDAD |
ENLACE |
|---|---|---|---|
1 |
1 |
||
2 |
Cable Micro USB |
1 |
|
3 |
1 |
||
4 |
Varios |
||
5 |
1 |
Esquema
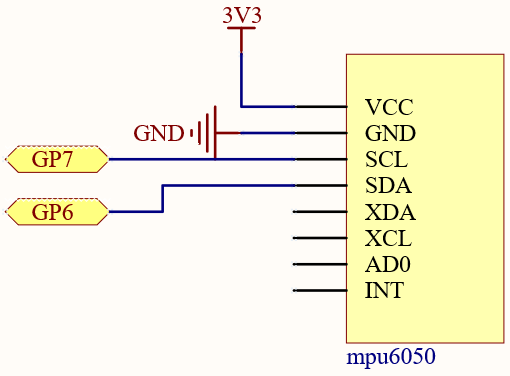
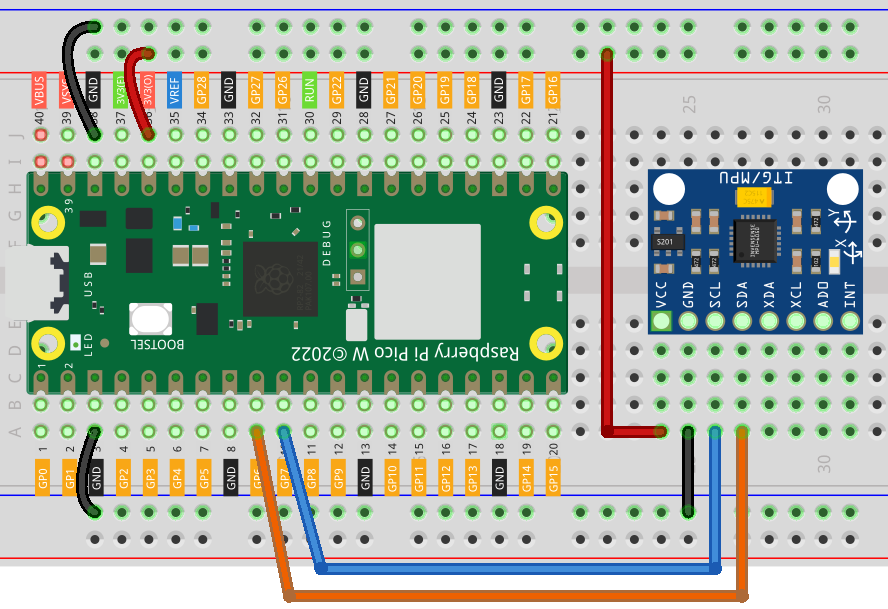
Conexiones
Código
Nota
Abre el archivo
6.3_6axis_motion_tracking.pyen la ruta dekepler-kit-main/micropythono copia este código en Thonny, luego haz clic en «Run Current Script» o simplemente presiona F5 para ejecutarlo.No olvides seleccionar el intérprete «MicroPython (Raspberry Pi Pico)» en la esquina inferior derecha.
Para tutoriales detallados, consulta Abrir y ejecutar código directamente.
Aquí necesitas usar las bibliotecas
imu.pyyvector3d.py. Verifica si han sido cargadas en Pico W. Para un tutorial detallado, consulta 1.4 Cargar las bibliotecas en el Pico.
from imu import MPU6050
from machine import I2C, Pin
import time
i2c = I2C(1, sda=Pin(6), scl=Pin(7), freq=400000)
mpu = MPU6050(i2c)
while True:
print("x: %s, y: %s, z: %s"%(mpu.accel.x, mpu.accel.y, mpu.accel.z))
time.sleep(0.5)
print("A: %s, B: %s, Y: %s"%(mpu.gyro.x, mpu.gyro.y, mpu.gyro.z))
time.sleep(0.5)
Una vez que el programa esté en ejecución, podrás ver los valores del acelerómetro de 3 ejes y del giroscopio de 3 ejes que se mostrarán en pantalla en un ciclo. Gira el MPU6050 al azar, y verás cómo cambian estos valores en consecuencia.
Para facilitar la visualización de los cambios, puedes comentar una de las líneas print y concentrarte en un conjunto de datos.
La unidad de valor de aceleración es m/s², y la unidad de valor del giroscopio es °/s.
¿Cómo funciona?
En la biblioteca imu, hemos integrado las funciones relevantes en la clase MPU6050.
MPU6050 es un módulo I2C y requiere un conjunto de pines I2C para inicializarse.
from imu import MPU6050
from machine import I2C, Pin
i2c = I2C(1, sda=Pin(6), scl=Pin(7), freq=400000)
mpu = MPU6050(i2c)
Posteriormente, podrás obtener los valores de aceleración y velocidad angular en tiempo real en mpu.accel.x, mpu.accel.y, mpu.accel.z, mpu.gyro.x, mpu.gyro.y, mpu.gyro.z.
while True:
print("x: %s, y: %s, z: %s"%(mpu.accel.x, mpu.accel.y, mpu.accel.z))
time.sleep(0.5)
print("A: %s, B: %s, Y: %s"%(mpu.gyro.x, mpu.gyro.y, mpu.gyro.z))
time.sleep(0.5)