Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
2.11 Reversing System
For this project we used an ultrasonic module and an active buzzer to create a reversing alarm system. The ultrasonic module is used to detect the distance, and the buzzer emits different frequencies of alarm sounds depending on the distance.
Required Components
In this project, we need the following components.
It’s definitely convenient to buy a whole kit, here’s the link:
Name |
ITEMS IN THIS KIT |
LINK |
|---|---|---|
Kepler Kit |
450+ |
You can also buy them separately from the links below.
SN |
COMPONENT |
QUANTITY |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro USB Cable |
1 |
|
3 |
1 |
||
4 |
Several |
||
5 |
1(S8050) |
||
6 |
1(1KΩ) |
||
7 |
Active Buzzer |
1 |
|
8 |
1 |
Wiring
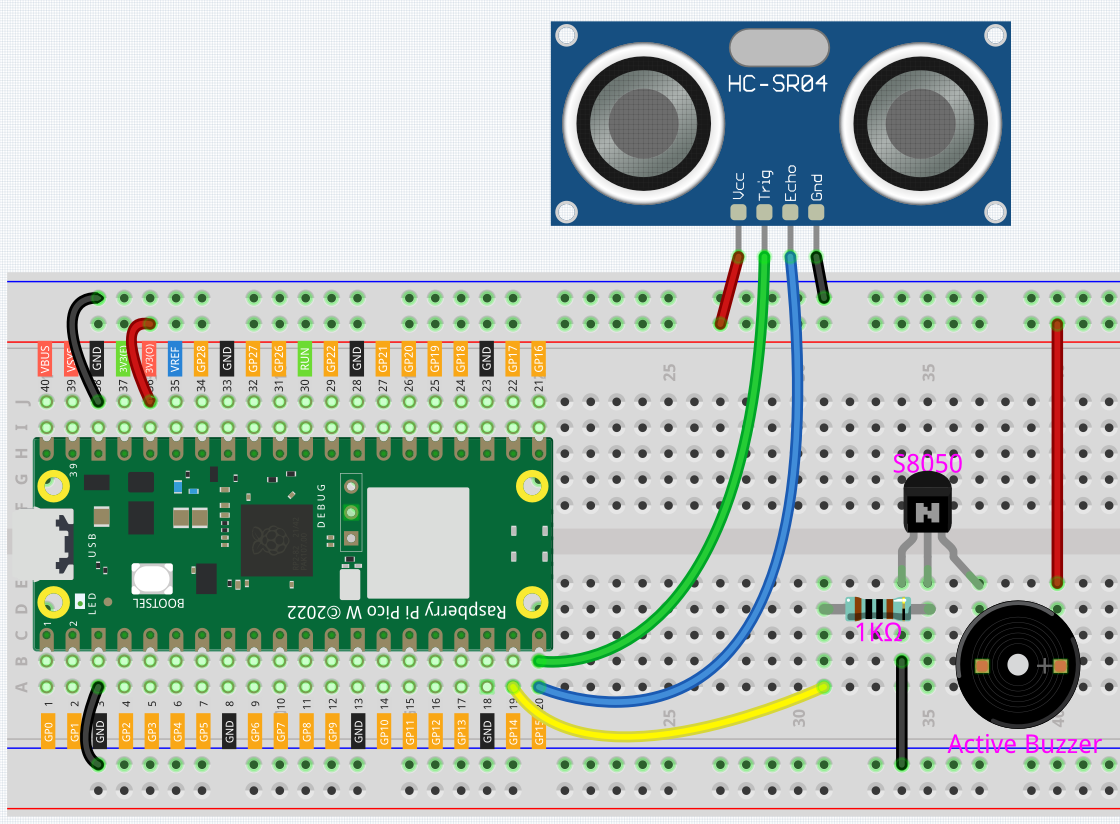
The Echo and Trig pins of the ultrasonic module are connected to GP15 at the same time, so that the ultrasonic module sends and receives signals from GP15.
The middle pin of the transistor connected to the buzzer is connected to GP14 through a 1kΩ resistor.
Code
Note
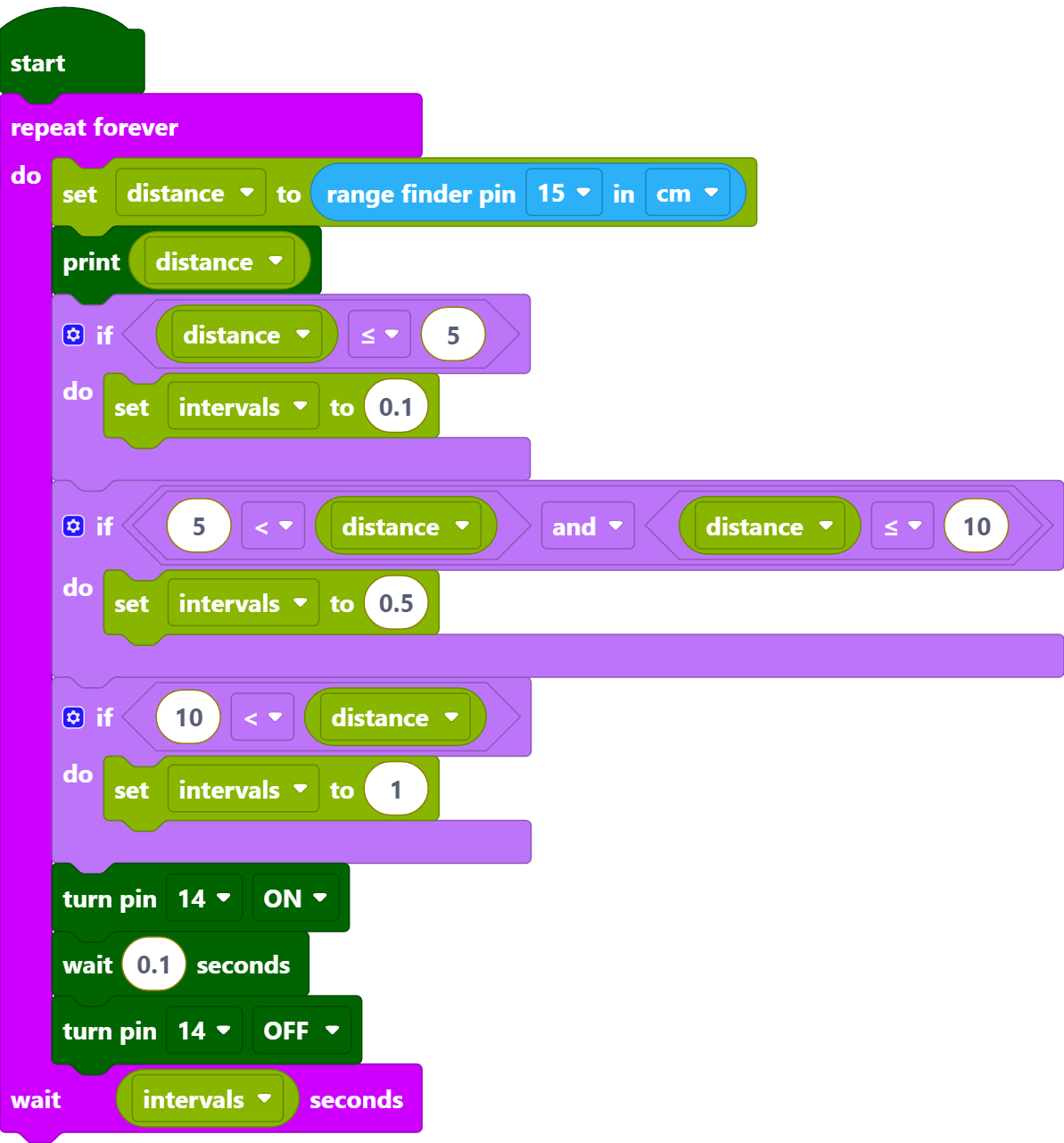
You can refer to the image below to write code by dragging and dropping.
Import
2.11_reversing_system.pngfrom the path ofkepler-kit-main\piper. For detailed tutorials, please refer to Import the Code.
After connecting Pico W, click the Start button and the code starts to run.
When the ultrasonic detection distance is less than 5cm, the buzzer emits a sharp sound (0.1s).
When the detection distance is between 5~10cm, the buzzer emits a slightly slow sound (0.5s).
When the detection distance is greater than 10cm, there is a sound prompt every 1 second.
How it Works?
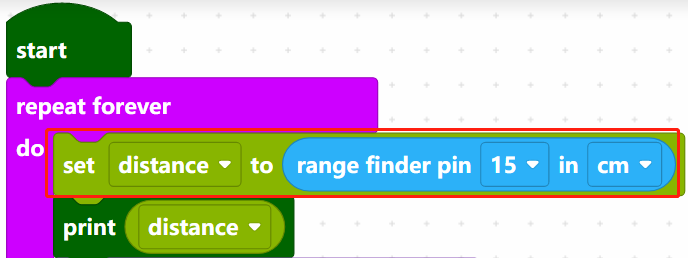
Read the distance (in cm) of the ultrasonic detection, and store it in the variable [distance].
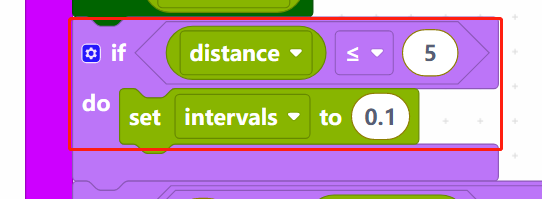
When distance is less than or equal to 5, set the variable intervals to 0.1s. The variable [intervals] is the interval between buzzer sounds.
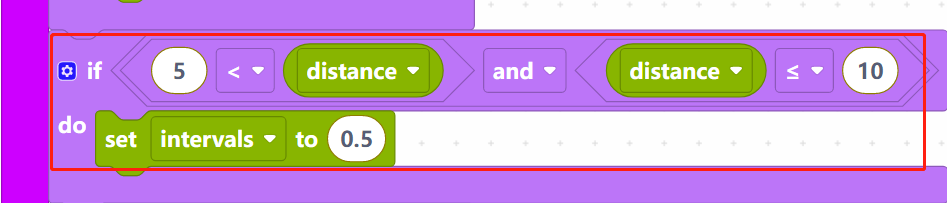
When distance is greater than 5 and less than or equal to 10, set the [intervals] to 0.5s.
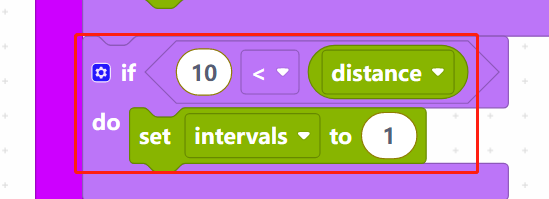
When distance is greater than 10, set the [intervals] time to 1s.
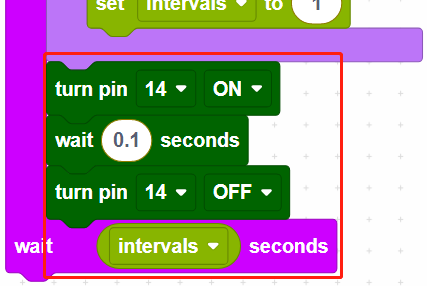
Finally, make the buzzer sound every [intervals] seconds.