Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
Servo
Introduction
In this project, we will learn how to control a servo motor using a Raspberry Pi. Servo motors are commonly used in robotics and automation for precise control of angular motion.
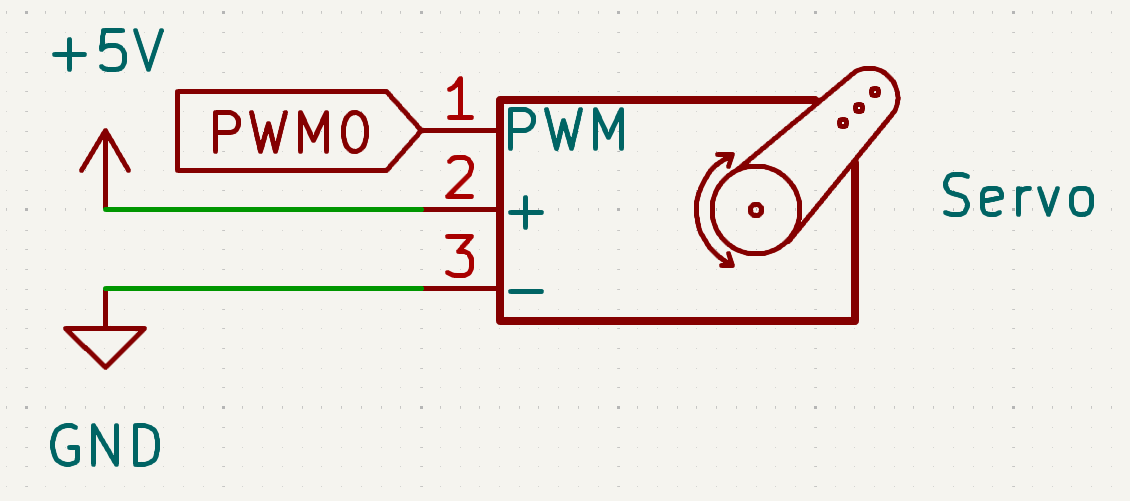
Circuit Diagram
The circuit diagram below shows the connections required for controlling the servo motor.
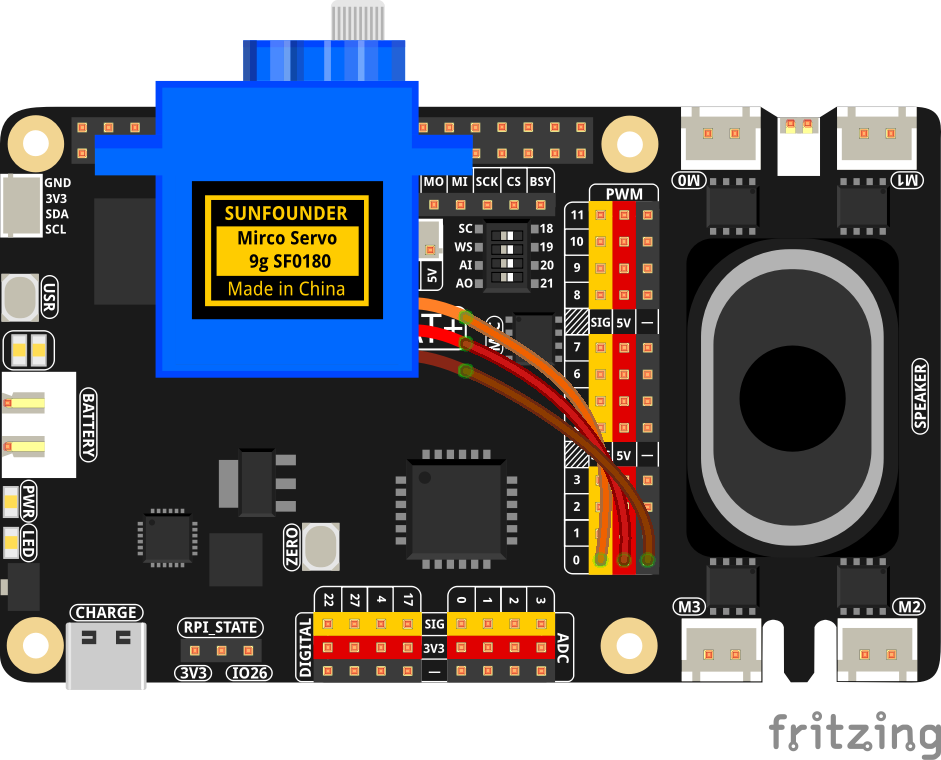
Wiring Diagram
Code
The following Python code demonstrates how to control the servo motor by moving it between various angles:
from fusion_hat.servo import Servo # Import the Servo class for controlling servos
from time import sleep # Import sleep for timing delays
servo = Servo(0) # Create a Servo object on channel 0
while True: # Loop forever
# Sweep from -90° to +90° in steps of 10°
for i in range(-90, 91, 10):
servo.angle(i) # Set servo to angle i
sleep(0.1) # Small delay for smooth movement
# Sweep back from +90° to -90° in steps of -10°
for i in range(90, -91, -10):
servo.angle(i) # Set servo to angle i
sleep(0.1) # Small delay for smooth movement
This Python script controls a servo motor connected to PWM 0. When executed:
The servo moves from -90 degrees to 90 degrees in 10-degree increments.
It pauses for 0.1 seconds between each movement.
It then reverses the direction and moves from 90 degrees to -90 degrees in 10-degree increments.
The process repeats indefinitely.