Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community auf Facebook! Tauche gemeinsam mit anderen Enthusiasten tiefer in Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Experten-Support: Löse After-Sales-Probleme und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tausche Tipps und Tutorials aus, um deine Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalte frühzeitig Zugang zu neuen Produktankündigungen und Sneak Peeks.
Spezielle Rabatte: Genieße exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nimm an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu erschaffen? Klicke [here] und tritt noch heute bei!
Ultraschallsensor-Modul
Einführung
Das Ultraschallsensor-Modul verwendet Ultraschallwellen, um Entfernungen mit bemerkenswerter Genauigkeit zu messen. Es sendet Ultraschallwellen aus und lauscht auf deren Echo, wobei die Entfernung anhand der Zeit berechnet wird, die das Echo für die Rückkehr benötigt. Diese vielseitige Technologie wird häufig in der Robotik, Hinderniserkennung und in Entfernungsmessanwendungen eingesetzt.
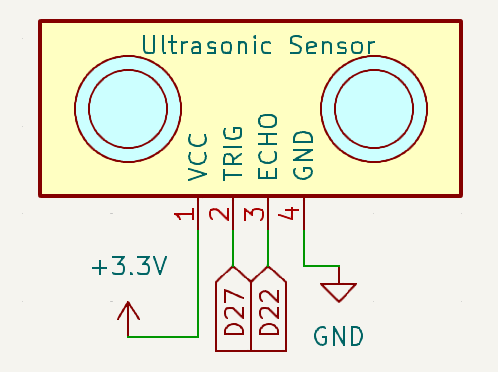
Schaltplan
Unten ist der Schaltplan für das Ultraschallsensor-Modul dargestellt:
Verdrahtungsdiagramm
Baue die Schaltung wie im folgenden Diagramm gezeigt auf:
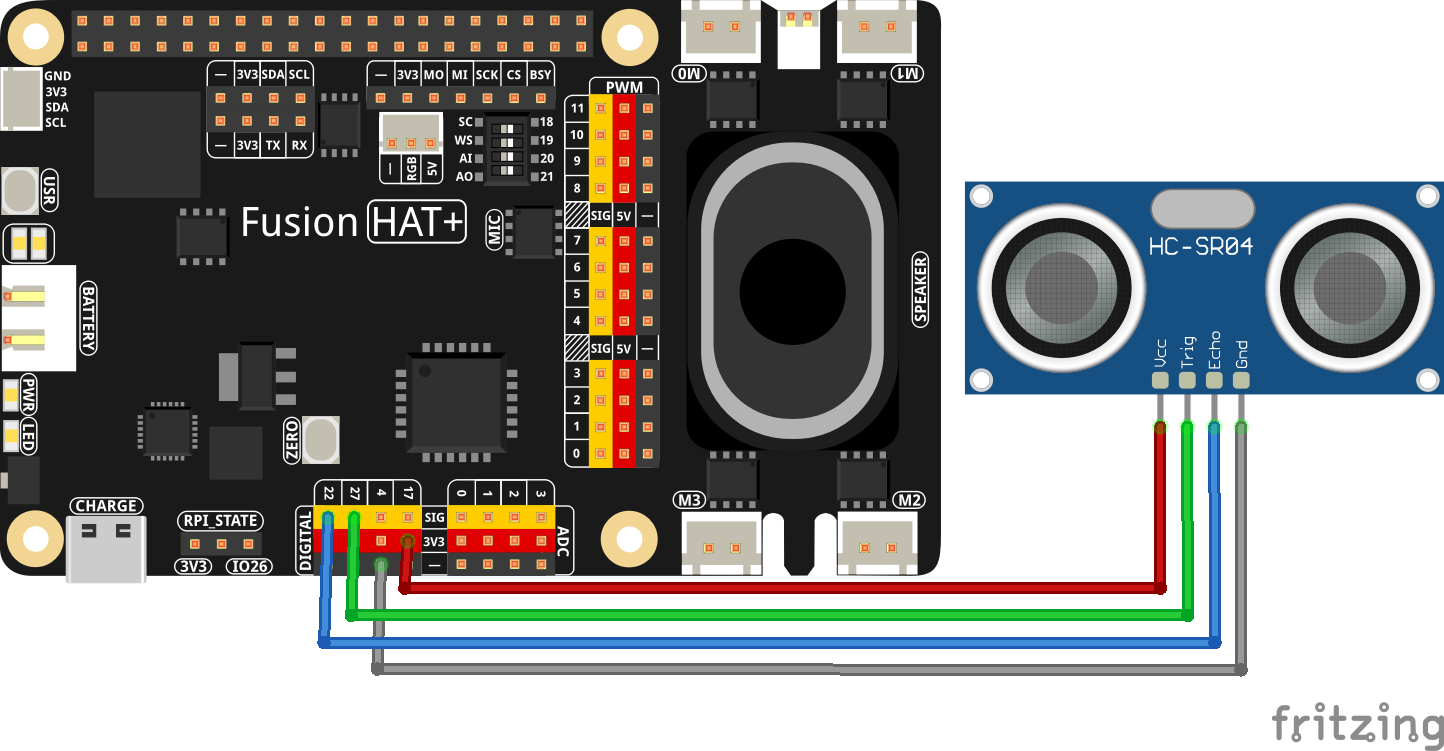
Stelle sicher, dass alle Verbindungen fest sitzen, wobei der Echo-Pin mit GPIO 22 und der Trigger-Pin mit GPIO 27 des Raspberry Pi verbunden ist.
Code
Unten findest du den Python-Code für dieses Projekt:
# Import Ultrasonic and Pin class
from fusion_hat.modules import Ultrasonic
from fusion_hat.pin import Pin
from time import sleep
# Create Ultrasonic object
sensor = Ultrasonic(Pin(27), Pin(22))
try:
# Main loop to continuously measure and report distance
while True:
dis = sensor.read() # Measure distance in centimeters
print('Distance: {:.2f} cm'.format(dis)) # Print the distance with two decimal precision
sleep(0.3) # Wait for 0.3 seconds before the next measurement
except KeyboardInterrupt:
# Handle KeyboardInterrupt (Ctrl+C) to gracefully exit the loop
pass
Dieses Python-Skript verwendet einen Ultraschall-Entfernungssensor, um die Entfernung zu einem Objekt zu messen und das Ergebnis in der Konsole anzuzeigen. Wenn es ausgeführt wird:
Der Sensor, der mit den GPIO-Pins 27 (Trigger) und 22 (Echo) verbunden ist, misst kontinuierlich die Entfernung zum nächstgelegenen Objekt.
Die Entfernung wird in Metern berechnet und in Zentimeter umgerechnet und dann im Format
Distance: <value> cmmit zwei Dezimalstellen Genauigkeit angezeigt.Die Entfernung wird alle 0,3 Sekunden aktualisiert, was eine nahezu Echtzeit-Überwachung ermöglicht.
Das Programm läuft unbegrenzt, bis es mit
Ctrl+Cunterbrochen wird; dann wird es ordnungsgemäß beendet.