Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community auf Facebook! Tauche gemeinsam mit anderen Enthusiasten tiefer in Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Experten-Support: Löse After-Sales-Probleme und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tausche Tipps und Tutorials aus, um deine Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalte frühzeitig Zugang zu neuen Produktankündigungen und Sneak Peeks.
Spezielle Rabatte: Genieße exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nimm an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu erschaffen? Klicke [here] und tritt noch heute bei!
Servo
Einführung
In diesem Projekt lernen wir, wie man einen Servomotor mit einem Raspberry Pi steuert. Servomotoren werden häufig in der Robotik und Automatisierung für die präzise Steuerung von Drehbewegungen eingesetzt.
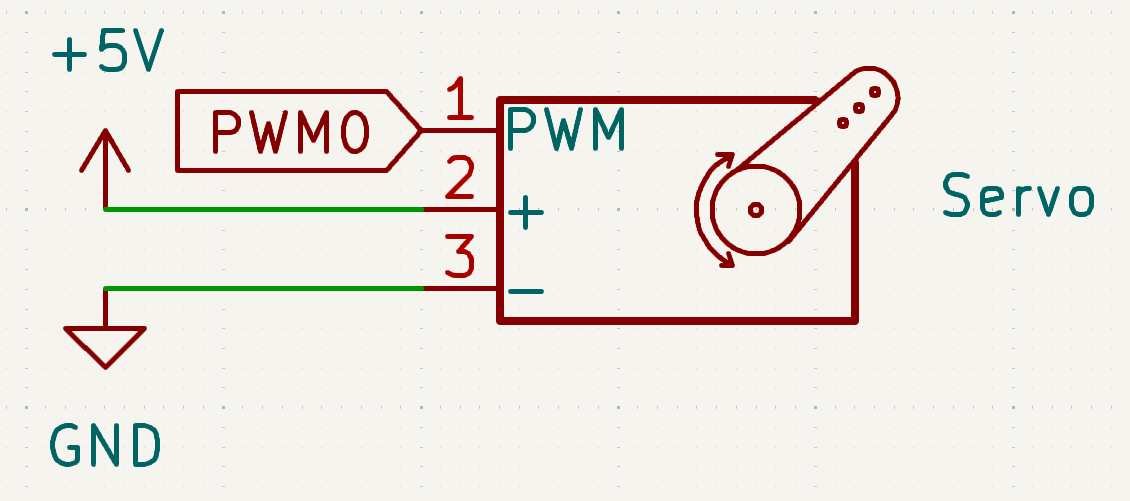
Schaltplan
Der untenstehende Schaltplan zeigt die erforderlichen Verbindungen zur Steuerung des Servomotors.
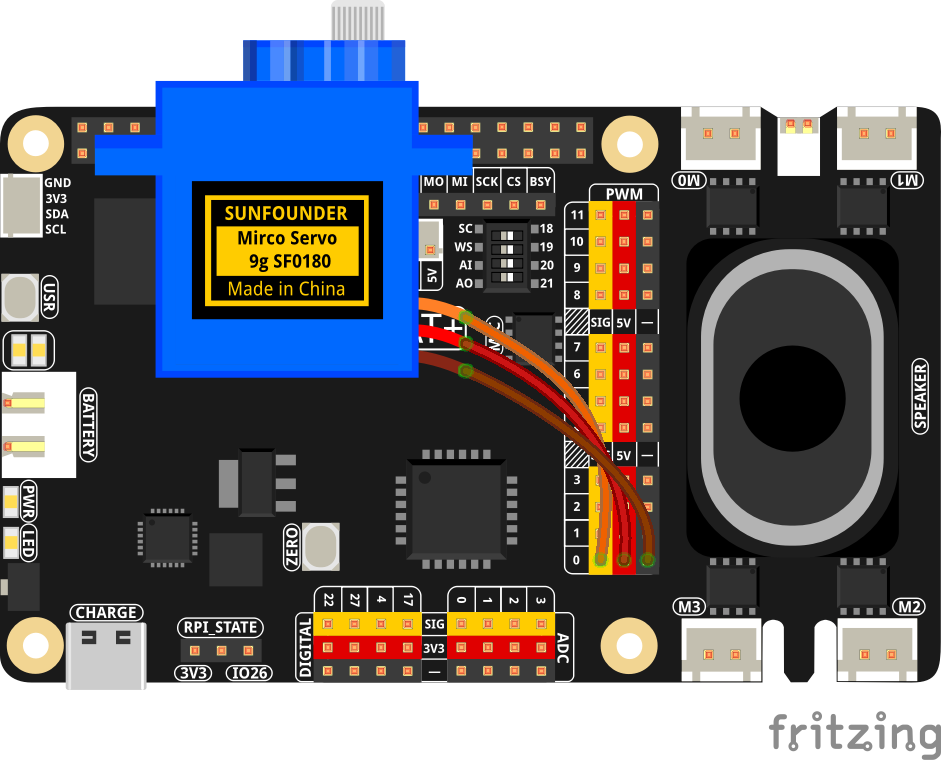
Verdrahtungsdiagramm
Code
Der folgende Python-Code zeigt, wie der Servomotor gesteuert wird, indem er zwischen verschiedenen Winkeln bewegt wird:
from fusion_hat.servo import Servo # Import the Servo class for controlling servos
from time import sleep # Import sleep for timing delays
servo = Servo(0) # Create a Servo object on channel 0
while True: # Loop forever
# Sweep from -90° to +90° in steps of 10°
for i in range(-90, 91, 10):
servo.angle(i) # Set servo to angle i
sleep(0.1) # Small delay for smooth movement
# Sweep back from +90° to -90° in steps of -10°
for i in range(90, -91, -10):
servo.angle(i) # Set servo to angle i
sleep(0.1) # Small delay for smooth movement
Dieses Python-Skript steuert einen an PWM 0 angeschlossenen Servomotor. Bei der Ausführung:
Der Servo bewegt sich in 10-Grad-Schritten von -90 Grad bis 90 Grad.
Zwischen jeder Bewegung pausiert er für 0,1 Sekunden.
Anschließend kehrt er die Richtung um und bewegt sich in 10-Grad-Schritten von 90 Grad zu -90 Grad.
Dieser Vorgang wiederholt sich unbegrenzt.