Nota
Ciao, benvenuto nella Community SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 con altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Accedi in anteprima ai nuovi annunci di prodotti e alle anteprime speciali.
Sconti speciali: Godi di sconti esclusivi sui nostri prodotti più recenti.
Promozioni e giveaway festivi: Partecipa a concorsi e promozioni durante le festività.
👉 Pronto a esplorare e creare con noi? Clicca [Qui] e unisciti oggi stesso!
2.2.2 Termistore (MCP3008)
Nota
A seconda della versione del kit, identifica se possiedi ADC0834 o MCP3008 e procedi con la sezione corrispondente.
Introduzione
Così come la fotoresistenza può rilevare la luce, il termistore è un dispositivo elettronico sensibile alla temperatura che può essere utilizzato per realizzare funzioni di controllo termico, come ad esempio un allarme di surriscaldamento.
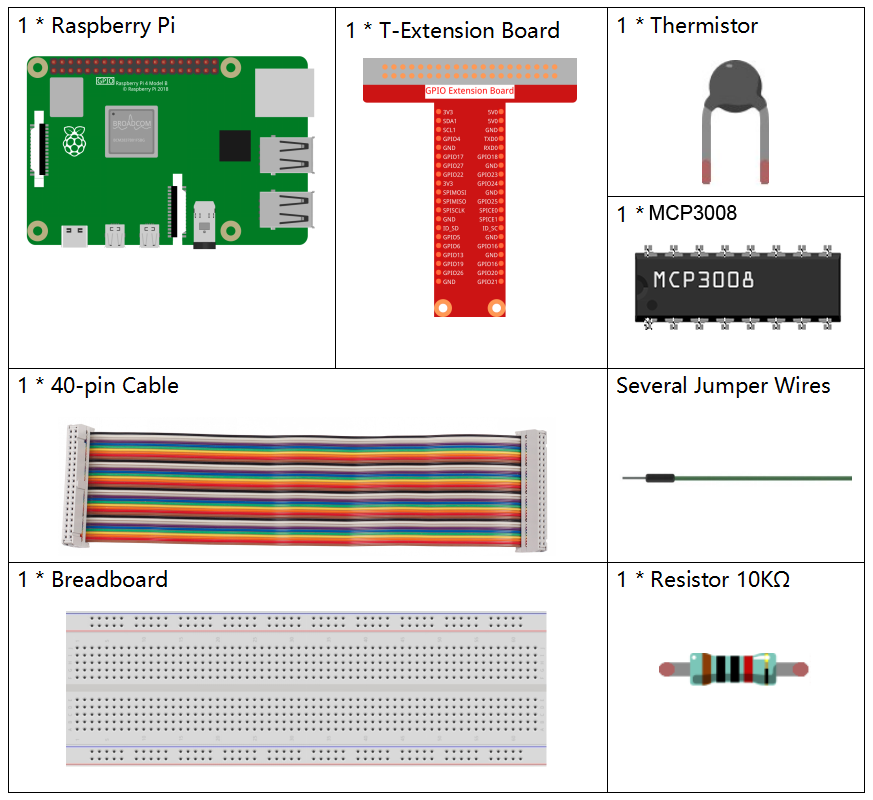
Componenti richiesti
In questo progetto sono necessari i seguenti componenti.
Principio
Un termistore è una resistenza sensibile alla temperatura che mostra una variazione precisa e prevedibile della resistenza proporzionale a piccoli cambiamenti di temperatura. L’entità di questa variazione dipende dalla sua composizione specifica. I termistori appartengono al gruppo più ampio dei componenti passivi, i quali, a differenza dei componenti attivi, non possono fornire guadagno di potenza o amplificazione a un circuito.
Il termistore è un elemento sensibile e ne esistono due tipi: a coefficiente di temperatura negativo (NTC) e a coefficiente di temperatura positivo (PTC). La resistenza di un termistore PTC aumenta con l’aumentare della temperatura, mentre per un NTC è l’opposto. In questo esperimento utilizziamo un NTC.

Il principio è che la resistenza del termistore NTC varia con la temperatura dell’ambiente esterno, rilevando così la temperatura in tempo reale. Quando la temperatura aumenta, la resistenza del termistore diminuisce. Il dato di tensione viene poi convertito in valore digitale tramite l’adattatore A/D, e il programma calcola e visualizza la temperatura in gradi Celsius o Fahrenheit.
In questo esperimento si utilizza un termistore e una resistenza di pull-up da 10kΩ. Ogni termistore ha una resistenza nominale; in questo caso è 10kΩ a 25 °C.
Relazione tra resistenza e temperatura:
RT = RN expB(1/TK – 1/TN)
RT è la resistenza del termistore NTC alla temperatura TK.
RN è la resistenza nominale del termistore alla temperatura nominale TN (qui 10kΩ).
TK è la temperatura in Kelvin (K = °C + 273,15).
TN è la temperatura nominale in Kelvin (273,15 + 25 °C).
B (beta) è la costante del materiale del termistore NTC, chiamata indice di sensibilità termica (qui 3950).
exp indica la funzione esponenziale, con base e ≈ 2,7.
Formula inversa per ottenere la temperatura in Kelvin:
TK= 1 / (ln(RT/RN)/B + 1/TN)
Per ottenere la temperatura in °C basta sottrarre 273,15.
Questa relazione è empirica e valida solo all’interno dell’intervallo di temperatura e resistenza previsto.
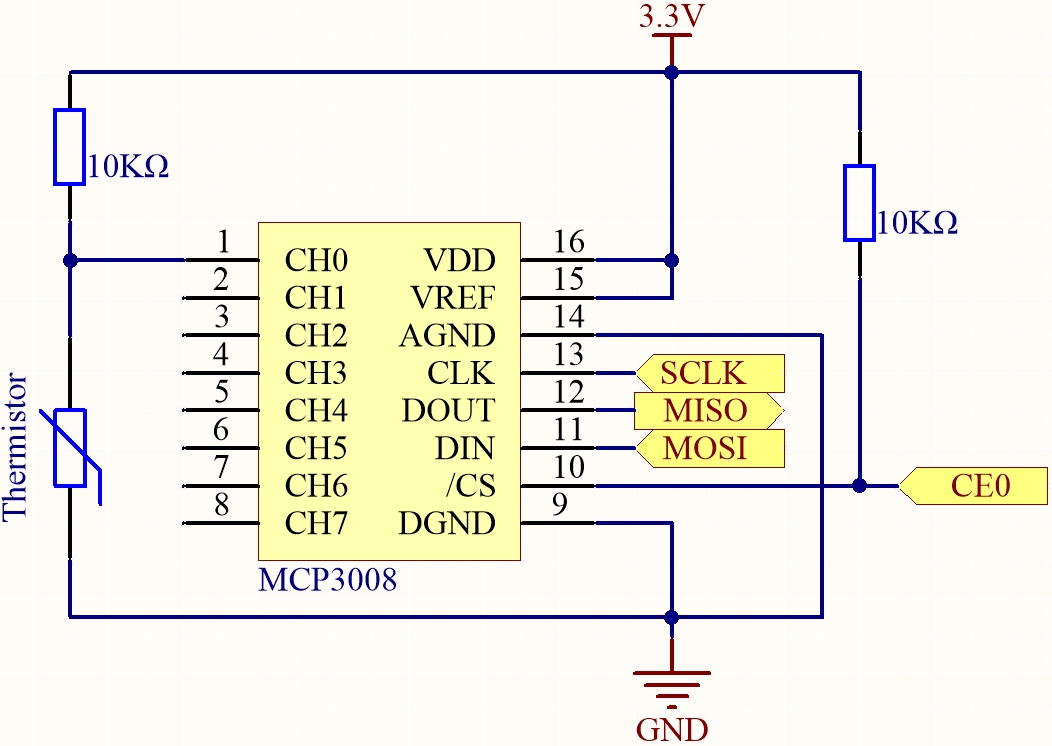
Schema elettrico
Nome T-Board |
physical |
WiringPi |
BCM |
|---|---|---|---|
SPICE0 |
pin24 |
10 |
8 |
SPIMOSI |
pin19 |
12 |
10 |
SPIMISO |
pin21 |
13 |
9 |
SPISCLK |
pin23 |
14 |
11 |
Procedura sperimentale
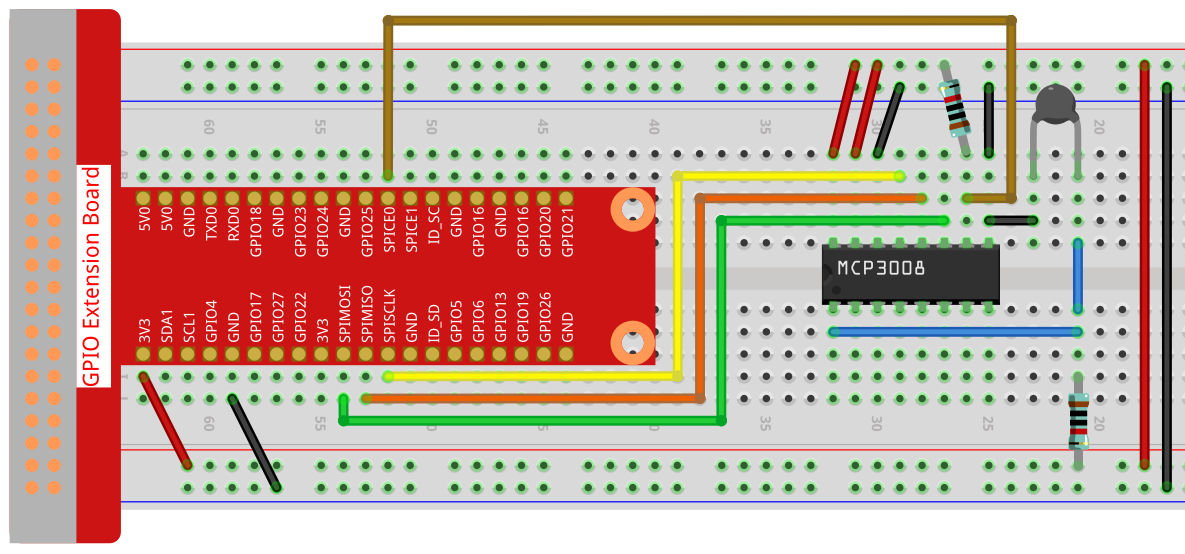
Passo 1: Montare il circuito.
Passo 2: Accedere alla cartella del codice.
cd ~/davinci-kit-for-raspberry-pi/c/2.2.2-2/
Passo 3: Compilare il codice.
gcc 2.2.2_Thermistor.c -o Thermistor -lwiringPi -lm
Nota
L’opzione -lm serve per caricare la libreria matematica. Non ometterla, altrimenti si verificherà un errore.
Passo 4: Eseguire il file compilato.
./Thermistor
Quando il codice è in esecuzione, il termistore rileva la temperatura ambiente e la stampa sullo schermo una volta terminato il calcolo.
Nota
Se il programma non funziona o appare l’errore «wiringPi.h: No such file or directory», fare riferimento a Installazione e verifica di WiringPi.
Codice
#include <wiringPi.h>
#include <wiringPiSPI.h>
#include <stdio.h>
#include <math.h>
#define SPI_CHANNEL 0 // CE0
#define SPI_SPEED 1000000 // 1MHz
int read_ADC(int channel) {
if (channel < 0 || channel > 7) return -1;
unsigned char buffer[3];
buffer[0] = 1; // Bit di start
buffer[1] = (8 + channel) << 4; // Modalità single-ended + canale
buffer[2] = 0;
wiringPiSPIDataRW(SPI_CHANNEL, buffer, 3);
int value = ((buffer[1] & 3) << 8) | buffer[2];
return value;
}
int main(void) {
int analogVal;
double Vr, Rt, temp, cel, Fah;
if (wiringPiSetup() == -1) {
printf("Inizializzazione wiringPi fallita!\n");
return 1;
}
if (wiringPiSPISetup(SPI_CHANNEL, SPI_SPEED) == -1) {
printf("Inizializzazione SPI fallita!\n");
return 1;
}
while (1) {
analogVal = read_ADC(0); // Lettura dal CH0
// MCP3008 è un ADC a 10 bit (0–1023)
Vr = 3.3 * analogVal / 1023.0; // Vref = 3,3V
Rt = 10000.0 * Vr / (3.3 - Vr); // Partitore di tensione con resistenza da 10kΩ
temp = 1 / ((log(Rt / 10000.0) / 3950.0) + (1 / (273.15 + 25.0)));
cel = temp - 273.15;
Fah = cel * 1.8 + 32;
printf("Celsius: %.2f C Fahrenheit: %.2f F\n", cel, Fah);
delay(1000);
}
return 0;
}
Spiegazione del codice
#include <wiringPi.h>
#include <wiringPiSPI.h>
#include <stdio.h>
#include <math.h>
Librerie incluse per il controllo GPIO (wiringPi.h), comunicazione SPI (wiringPiSPI.h), operazioni di input/output standard (stdio.h) e funzioni matematiche (math.h).
#define SPI_CHANNEL 0
#define SPI_SPEED 1000000
Definiscono il canale SPI e la velocità di comunicazione SPI. Qui si usa il canale 0 (CE0) e una velocità di clock di 1 MHz.
int read_ADC(int channel)
Funzione per leggere i dati analogici da un canale specifico dell’MCP3008.
buffer[0] = 1;
buffer[1] = (8 + channel) << 4;
buffer[2] = 0;
Configura il comando SPI secondo il protocollo MCP3008: bit di avvio, modalità single-ended e numero di canale.
wiringPiSPIDataRW(SPI_CHANNEL, buffer, 3);
Invia il comando SPI e riceve i dati a 10 bit dall’MCP3008.
int value = ((buffer[1] & 3) << 8) | buffer[2];
Estrae e combina il risultato ADC a 10 bit dal buffer SPI restituito.
if (wiringPiSetup() == -1) { ... }
if (wiringPiSPISetup(SPI_CHANNEL, SPI_SPEED) == -1) { ... }
Inizializza WiringPi e configura lo SPI. Se fallisce, il programma termina.
analogVal = read_ADC(0);
Legge il segnale analogico dal canale 0 dell’MCP3008, dove è collegato il partitore di tensione con termistore.
Vr = 3.3 * analogVal / 1023.0;
Converte il valore ADC digitale in tensione analogica (0–1023 con Vref di 3,3V).
Rt = 10000.0 * Vr / (3.3 - Vr);
Calcola la resistenza del termistore usando la formula del partitore di tensione, assumendo una resistenza fissa di 10kΩ.
temp = 1 / ((log(Rt / 10000.0) / 3950.0) + (1 / (273.15 + 25.0)));
Applica l’equazione del parametro B per ottenere la temperatura in Kelvin. T(K) = 1 / [ln(Rt/R₀)/B + 1/T₀], dove - R₀ = 10kΩ - B = 3950 - T₀ = 298,15K (25°C)
cel = temp - 273.15;
Converte la temperatura da Kelvin a gradi Celsius.
Fah = cel * 1.8 + 32;
Converte la temperatura in gradi Fahrenheit.
printf("Celsius: %.2f C Fahrenheit: %.2f F\n", cel, Fah);
Visualizza la temperatura in °C e °F nel terminale con due cifre decimali.