Note
Bonjour, bienvenue dans la communauté SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts sur Facebook ! Approfondissez vos connaissances sur Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Assistance experte : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre & Partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus exclusifs.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des tirages au sort et à des promotions lors des fêtes.
👉 Prêt à explorer et créer avec nous ? Cliquez sur [Ici] et rejoignez-nous dès aujourd’hui !
3.1.4 Ventilateur intelligent (MCP3008)
Note
Selon la version de votre kit, veuillez identifier si vous disposez d’un ADC0834 ou d’un MCP3008 et poursuivre avec la section correspondante.
Introduction
Dans ce projet, nous utiliserons des moteurs, des boutons et des thermistances pour créer un ventilateur intelligent manuel + automatique dont la vitesse est réglable.
Composants nécessaires
Dans ce projet, nous avons besoin des composants suivants.
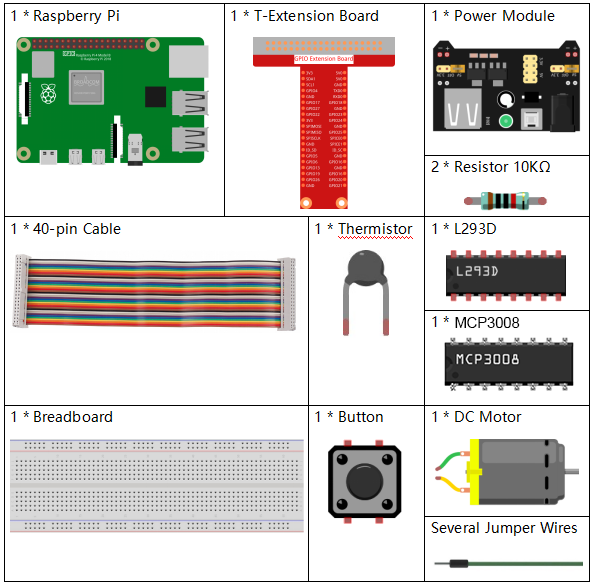
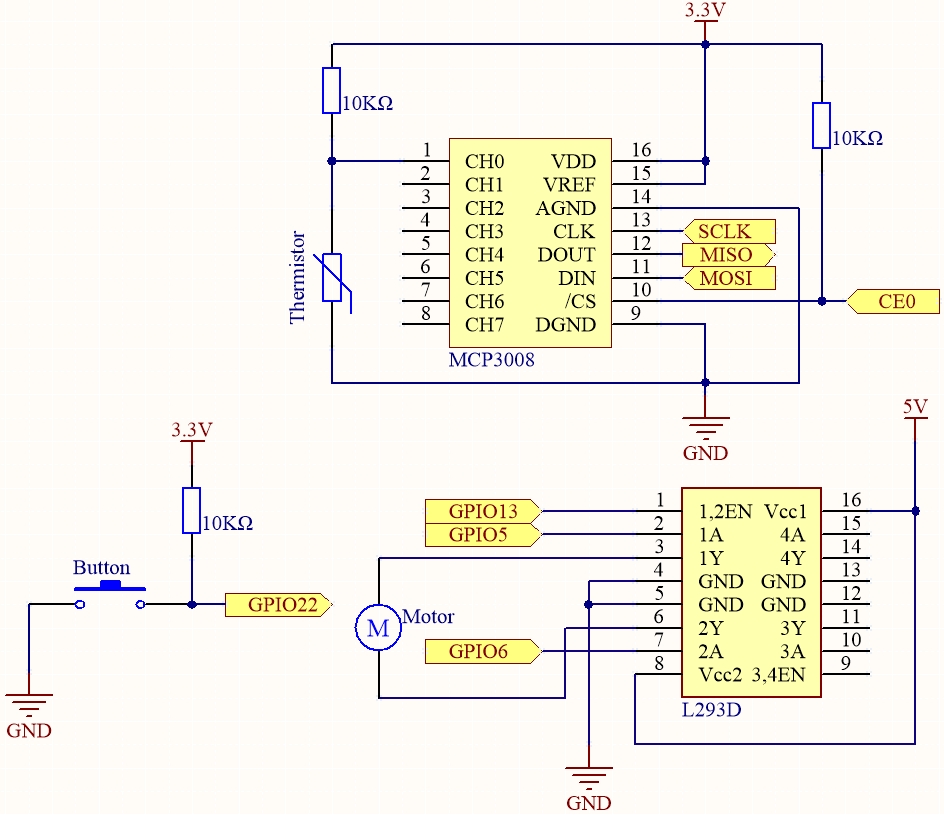
Schéma de câblage
Nom T-Board |
physique |
wiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |
Procédure expérimentale
Étape 1 : Montez le circuit.
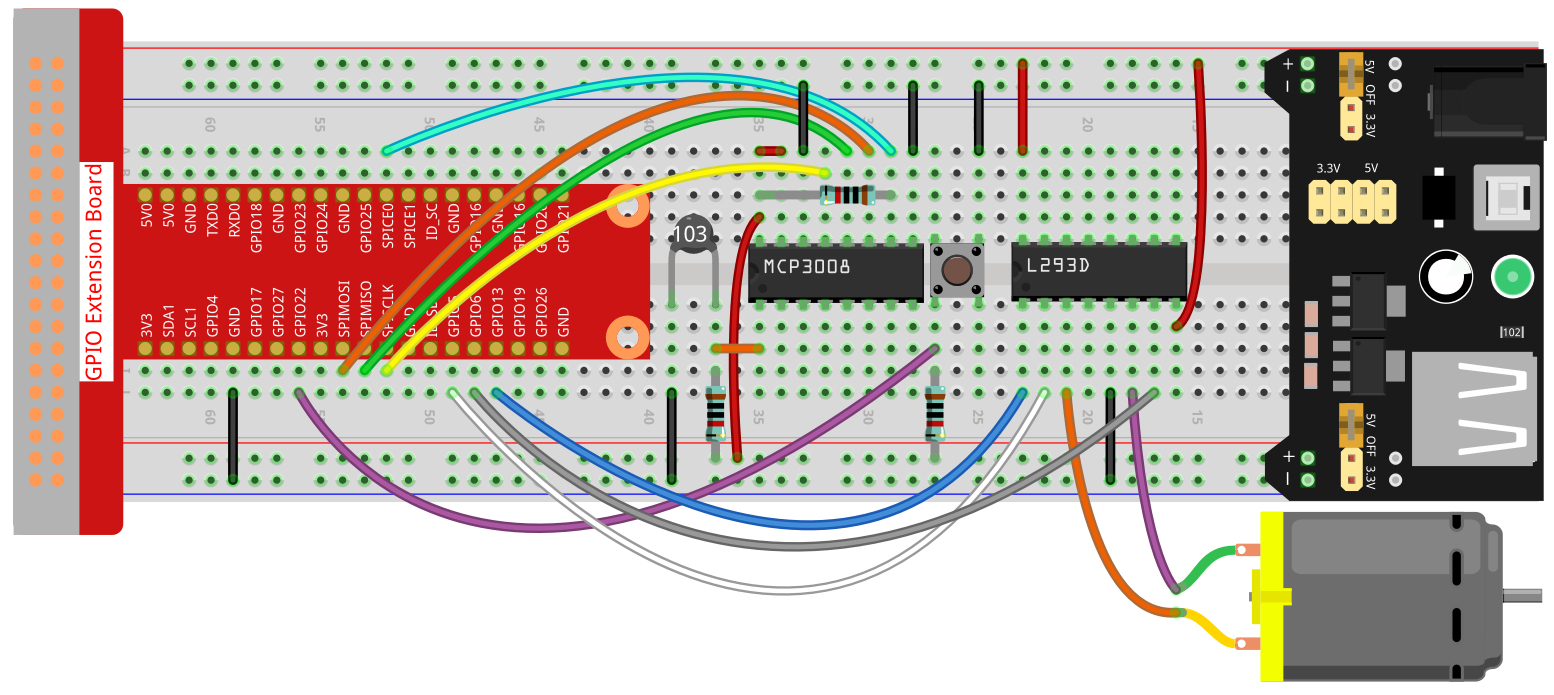
Note
Le module d’alimentation peut utiliser une pile 9 V avec le connecteur de pile 9 V fourni dans le kit.

Étape 2 : Configurez l’interface SPI et installez la bibliothèque spidev (voir Configuration SPI pour des instructions détaillées). Si vous avez déjà effectué ces étapes, vous pouvez les passer.
Étape 3 : Accédez au dossier du code.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Étape 4 : Exécutez.
sudo python3 3.1.4-2_SmartFan_zero.py
Lorsque le code s’exécute, démarrez le ventilateur en appuyant sur le bouton. À chaque pression, la vitesse est ajustée d’un niveau vers le haut ou vers le bas. Il y a 5 niveaux de vitesse : 0~4. Lorsque la vitesse est au 4ème niveau et que vous appuyez à nouveau, le ventilateur s’arrête avec une vitesse de 0.
Dès que la température augmente ou baisse de plus de 2 °C, la vitesse augmente ou diminue automatiquement d’un niveau.
Code
Note
Vous pouvez Modifier/Réinitialiser/Copier/Exécuter/Arrêter le code ci-dessous. Mais avant cela, vous devez vous rendre dans le chemin du code source comme davinci-kit-for-raspberry-pi/python-pi5. Après avoir modifié le code, vous pouvez l’exécuter directement pour voir l’effet.
#!/usr/bin/env python3
from gpiozero import Motor, Button
from time import sleep
import spidev
import math
# Initialiser SPI pour MCP3008
spi = spidev.SpiDev()
spi.open(0, 0) # Bus 0, CE0 (GPIO8 / broche physique 24)
spi.max_speed_hz = 1000000 # 1 MHz
# Initialiser les broches GPIO pour le bouton et le moteur
BtnPin = Button(22) # GPIO22 (broche physique 15)
motor = Motor(forward=5, backward=6, enable=13) # GPIO5, GPIO6, GPIO13
# Variables pour suivre le niveau de vitesse du moteur et les températures
level = 0
currentTemp = 0
markTemp = 0
def read_adc(channel):
"""
Lit une valeur analogique depuis le canal MCP3008 (0–7).
"""
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
def temperature():
"""
Lit et calcule la température actuelle depuis le capteur.
Retourne :
float : Température actuelle en Celsius.
"""
analogVal = read_adc(0) # Thermistance connectée à CH0
Vr = 3.3 * analogVal / 1023.0 # Pour un système en 3,3 V
Rt = 10000.0 * Vr / (3.3 - Vr)
temp = 1 / (((math.log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0)))
Cel = temp - 273.15
return Cel
def motor_run(level):
"""
Ajuste la vitesse du moteur en fonction du niveau indiqué.
Args :
level (int): Niveau de vitesse souhaité.
Retourne :
int : Niveau de vitesse ajusté.
"""
if level == 0:
motor.stop()
return 0
if level >= 4:
level = 4
motor.forward(speed=float(level / 4))
return level
def changeLevel():
"""
Change le niveau de vitesse du moteur lorsque le bouton est pressé et met à jour la température de référence.
"""
global level, currentTemp, markTemp
print("Bouton pressé")
level = (level + 1) % 5
markTemp = currentTemp
# Lier l’événement du bouton à la fonction changeLevel
BtnPin.when_pressed = changeLevel
def main():
"""
Fonction principale pour surveiller et réagir en continu aux variations de température.
"""
global level, currentTemp, markTemp
markTemp = temperature()
while True:
currentTemp = temperature()
if level != 0:
if currentTemp - markTemp <= -2:
level -= 1
markTemp = currentTemp
elif currentTemp - markTemp >= 2:
if level < 4:
level += 1
markTemp = currentTemp
level = motor_run(level)
sleep(0.2)
# Exécuter la fonction principale et gérer KeyboardInterrupt
try:
main()
except KeyboardInterrupt:
motor.stop()
spi.close()
Explication du code
Importe les bibliothèques pour contrôler le moteur et le bouton, communiquer via SPI avec le MCP3008, et effectuer des calculs mathématiques. La bibliothèque
gpiozerocontrôle les périphériques GPIO,spidevcommunique avec l’ADC MCP3008, etmathcalcule la température à partir de la résistance.#!/usr/bin/env python3 from gpiozero import Motor, Button from time import sleep import spidev import math
Initialise la communication SPI sur le bus 0, périphérique 0 (CE0), connecté à la puce ADC MCP3008.
# Initialiser SPI pour MCP3008 spi = spidev.SpiDev() spi.open(0, 0) # Bus 0, CE0 (GPIO8 / broche physique 24) spi.max_speed_hz = 1000000 # 1 MHz
Configure la broche GPIO 22 comme entrée pour le bouton et assigne les broches GPIO 5 (avant), 6 (arrière) et 13 (activation) au moteur. Déclare également des variables globales pour la vitesse et le suivi de température.
# Initialiser les broches GPIO pour le bouton et le moteur BtnPin = Button(22) # GPIO22 (broche physique 15) motor = Motor(forward=5, backward=6, enable=13) # GPIO5, GPIO6, GPIO13 # Variables pour suivre le niveau de vitesse du moteur et les températures level = 0 currentTemp = 0 markTemp = 0
Définit une fonction pour lire les valeurs analogiques depuis le MCP3008 via SPI. Retourne un nombre 10 bits (0–1023).
def read_adc(channel): """ Lit une valeur analogique depuis le canal MCP3008 (0–7). """ if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
Définit une fonction pour lire la température depuis la thermistance connectée au CH0 du MCP3008. Convertit la valeur ADC en tension, calcule la résistance, puis en température (°C) avec l’approximation de Steinhart-Hart.
def temperature(): """ Lit et calcule la température actuelle depuis le capteur. Retourne : float : Température actuelle en Celsius. """ analogVal = read_adc(0) # Thermistance connectée à CH0 Vr = 3.3 * analogVal / 1023.0 # Pour un système en 3,3 V Rt = 10000.0 * Vr / (3.3 - Vr) temp = 1 / (((math.log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0))) Cel = temp - 273.15 return Cel
Fonction pour contrôler la vitesse du moteur selon
level(0–4). Niveau 0 : arrêt. Niveaux 1–4 : vitesse proportionnelle (ex. niveau 2 = 50 %).def motor_run(level): """ Ajuste la vitesse du moteur en fonction du niveau indiqué. Args : level (int): Niveau de vitesse souhaité. Retourne : int : Niveau de vitesse ajusté. """ if level == 0: motor.stop() return 0 if level >= 4: level = 4 motor.forward(speed=float(level / 4)) return level
Définit une fonction événementielle qui incrémente la vitesse de 0 à 4 en boucle et met à jour la température de référence à chaque changement.
def changeLevel(): """ Change le niveau de vitesse du moteur lorsque le bouton est pressé et met à jour la température de référence. """ global level, currentTemp, markTemp print("Bouton pressé") level = (level + 1) % 5 markTemp = currentTemp # Lier l’événement du bouton à la fonction changeLevel BtnPin.when_pressed = changeLevel
La logique principale lit en continu la température et la compare à la référence (
markTemp). Si l’écart est ±2 °C, la vitesse est ajustée en conséquence. Une courte pause évite les changements trop rapides.def main(): """ Fonction principale pour surveiller et réagir en continu aux variations de température. """ global level, currentTemp, markTemp markTemp = temperature() while True: currentTemp = temperature() if level != 0: if currentTemp - markTemp <= -2: level -= 1 markTemp = currentTemp elif currentTemp - markTemp >= 2: if level < 4: level += 1 markTemp = currentTemp level = motor_run(level) sleep(0.2)
Exécute la fonction principale dans un bloc try-except et garantit que le moteur est arrêté et la connexion SPI fermée correctement en cas d’interruption par Ctrl+C.
# Exécuter la fonction principale et gérer KeyboardInterrupt try: main() except KeyboardInterrupt: motor.stop() spi.close()