Note
Bonjour et bienvenue dans la communauté SunFounder dédiée aux passionnés de Raspberry Pi, Arduino et ESP32 sur Facebook ! Plongez au cœur de l’univers Raspberry Pi, Arduino et ESP32 avec d’autres amateurs.
Pourquoi nous rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et relevez les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre & Partager : Échangez des conseils et tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Profitez d’un accès anticipé aux annonces de nouveaux produits et à des avant-premières.
Réductions spéciales : Bénéficiez de remises exclusives sur nos nouveaux produits.
Promotions festives et concours : Participez à des concours et promotions pendant les fêtes.
👉 Prêt à explorer et à créer avec nous ? Cliquez sur [Ici] et rejoignez-nous dès aujourd’hui !
3.1.1 Dispositif de Comptage
Introduction
Dans ce projet, nous allons créer un système de comptage avec affichage numérique, composé d’un capteur PIR et d’un afficheur à 4 segments. Lorsque le capteur PIR détecte qu’une personne passe à proximité, le numéro sur l’afficheur augmentera de 1. Ce dispositif peut être utilisé pour compter le nombre de personnes traversant un passage.
Composants nécessaires
Dans ce projet, nous aurons besoin des composants suivants :
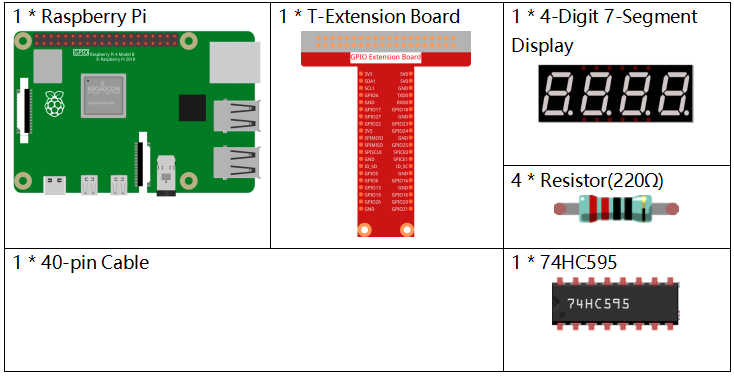
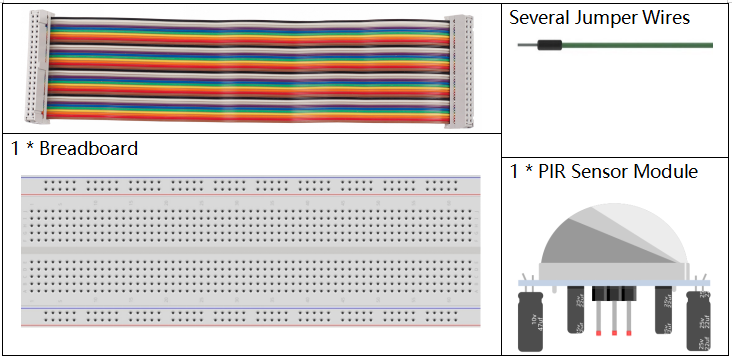
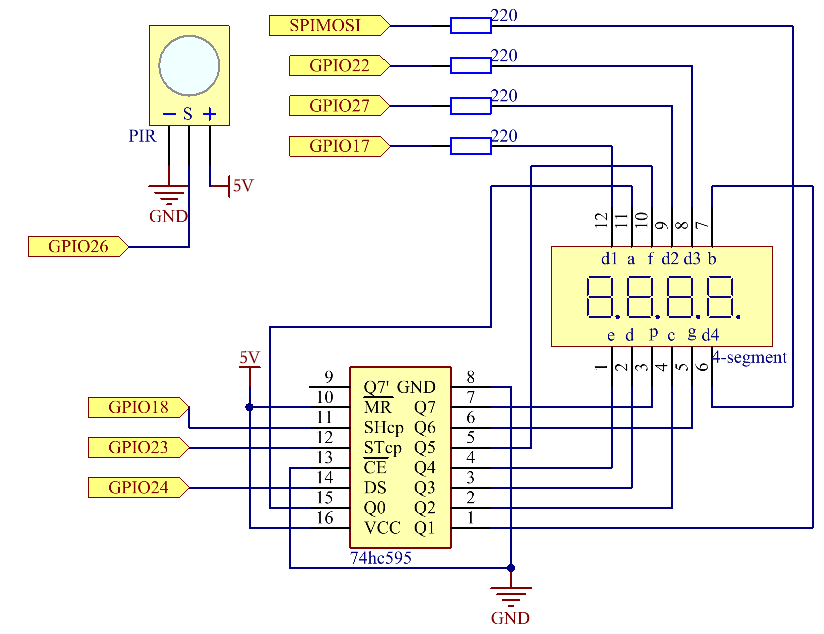
Schéma de câblage
T-Board Name |
physical |
wiringPi |
BCM |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
SPIMOSI |
Pin 19 |
12 |
10 |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO23 |
Pin 16 |
4 |
23 |
GPIO24 |
Pin 18 |
5 |
24 |
GPIO26 |
Pin 37 |
25 |
26 |
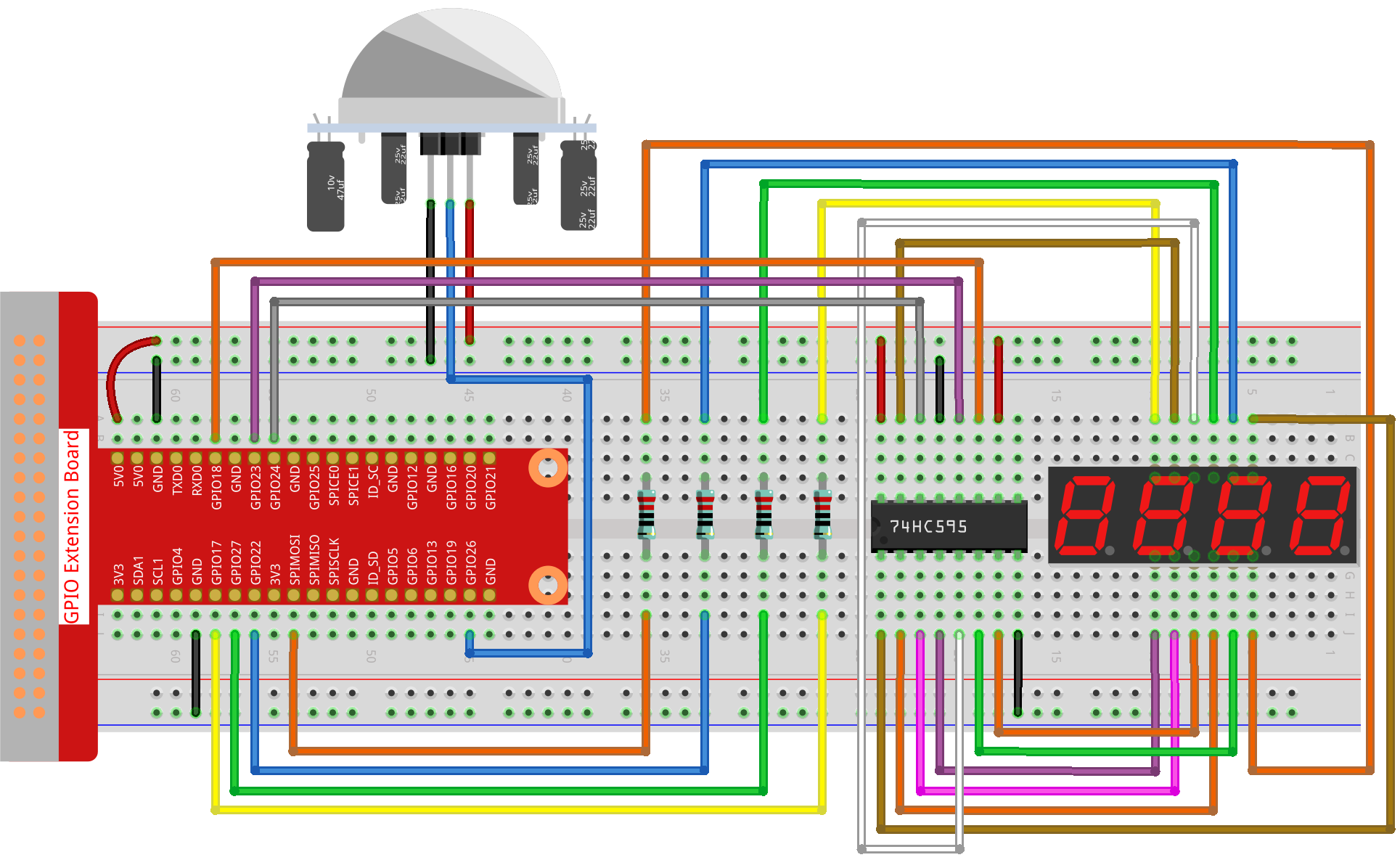
Procédure expérimentale
Étape 1 : Construisez le circuit.
Étape 2 : Accédez au dossier du code.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Étape 3 : Exécutez le fichier exécutable.
sudo python3 3.1.1_CountingDevice.py
Une fois le code exécuté, lorsque le capteur PIR détecte le passage de quelqu’un, le numéro sur l’afficheur à 4 segments s’incrémente de 1.
Il y a deux potentiomètres sur le module PIR : l’un pour ajuster la sensibilité et l’autre pour régler la distance de détection. Pour un fonctionnement optimal, tournez-les tous deux complètement dans le sens antihoraire.

Avertissement
En cas de message d’erreur RuntimeError: Cannot determine SOC peripheral base address, veuillez consulter Si gpiozero ne fonctionne pas..
Note
Code
Note
Vous pouvez modifier/réinitialiser/copier/exécuter/arrêter le code ci-dessous. Mais avant cela, vous devez accéder au chemin source du code, tel que davinci-kit-for-raspberry-pi/python-pi5. Après avoir modifié le code, vous pouvez l’exécuter directement pour voir le résultat.
#!/usr/bin/env python3
from gpiozero import OutputDevice, MotionSensor
# Initialiser le capteur de mouvement PIR sur GPIO 26
pir = MotionSensor(26)
# Initialiser les broches du registre à décalage
SDI = OutputDevice(24) # Entrée de Données Séries
RCLK = OutputDevice(23) # Entrée de l'Horloge du Registre
SRCLK = OutputDevice(18) # Entrée de l'Horloge du Registre à Décalage
# Initialiser les broches de l'afficheur à 7 segments
placePin = [OutputDevice(pin) for pin in (10, 22, 27, 17)]
# Définir les codes binaires pour chaque chiffre (0-9) sur l'afficheur 7 segments
number = (0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xf8, 0x80, 0x90)
# Compteur pour le nombre affiché
compteur = 0
def clearDisplay():
# Efface l'affichage en désactivant tous les segments
for _ in range(8):
SDI.on()
SRCLK.on()
SRCLK.off()
RCLK.on()
RCLK.off()
def hc595_shift(data):
# Envoie les données vers le registre à décalage 74HC595
for i in range(8):
SDI.value = 0x80 & (data << i)
SRCLK.on()
SRCLK.off()
RCLK.on()
RCLK.off()
def pickDigit(digit):
# Active un chiffre spécifique de l'afficheur à 7 segments
for pin in placePin:
pin.off()
placePin[digit].on()
def display():
# Met à jour l'affichage avec la valeur actuelle du compteur
global compteur
clearDisplay()
pickDigit(0)
hc595_shift(number[counter % 10])
clearDisplay()
pickDigit(1)
hc595_shift(number[counter % 100//10])
clearDisplay()
pickDigit(2)
hc595_shift(number[counter % 1000//100])
clearDisplay()
pickDigit(3)
hc595_shift(number[counter % 10000//1000])
def loop():
# Boucle principale pour mettre à jour l'affichage et vérifier la détection de mouvement
global counter
currentState = 0
lastState = 0
while True:
display()
currentState = 1 if pir.motion_detected else 0
if currentState == 1 and lastState == 0:
counter += 1
lastState = currentState
try:
loop()
except KeyboardInterrupt:
# Éteint toutes les broches lorsque le script est interrompu
SDI.off()
SRCLK.off()
RCLK.off()
pass
Explication du Code
Cette ligne importe les classes
OutputDeviceetMotionSensorde la bibliothèquegpiozero.OutputDevicepeut représenter une LED, un moteur, ou tout appareil que vous souhaitez contrôler en tant que sortie. LeMotionSensorest généralement un capteur PIR (infrarouge passif) utilisé pour détecter les mouvements.#!/usr/bin/env python3 from gpiozero import OutputDevice, MotionSensor
Initialise le capteur de mouvement PIR connecté à la broche GPIO 26.
# Initialiser le capteur de mouvement PIR sur GPIO 26 pir = MotionSensor(26)
Initialise les broches GPIO connectées à l’Entrée de Données Séries (SDI), à l’Entrée de l’Horloge du Registre (RCLK), et à l’Entrée de l’Horloge du Registre à Décalage (SRCLK).
# Initialiser les broches du registre à décalage SDI = OutputDevice(24) # Entrée de Données Séries RCLK = OutputDevice(23) # Entrée de l'Horloge du Registre SRCLK = OutputDevice(18) # Entrée de l'Horloge du Registre à Décalage
Initialise les broches de chaque chiffre de l’afficheur 7 segments et définit les codes binaires correspondants aux chiffres 0 à 9.
# Initialiser les broches de l'afficheur à 7 segments placePin = [OutputDevice(pin) for pin in (10, 22, 27, 17)] # Définir les codes binaires pour chaque chiffre (0-9) number = (0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xf8, 0x80, 0x90)
Efface l’affichage 7 segments en désactivant tous les segments avant d’afficher le prochain chiffre.
def clearDisplay(): # Efface l'affichage en désactivant tous les segments for _ in range(8): SDI.on() SRCLK.on() SRCLK.off() RCLK.on() RCLK.off()
Envoie un octet de données au registre à décalage 74HC595 pour contrôler les segments de l’afficheur.
def hc595_shift(data): # Envoie les données vers le registre à décalage 74HC595 for i in range(8): SDI.value = 0x80 & (data << i) SRCLK.on() SRCLK.off() RCLK.on() RCLK.off()
Sélectionne le chiffre à activer sur l’afficheur 7 segments. Chaque chiffre est contrôlé par une broche GPIO distincte.
def pickDigit(digit): # Active un chiffre spécifique de l'afficheur 7 segments for pin in placePin: pin.off() placePin[digit].on()
Initialise l’affichage en commençant par le chiffre des unités, puis active successivement les chiffres des dizaines, des centaines et des milliers. Cette activation rapide des différents chiffres donne l’illusion d’un affichage continu sur quatre digits.
def display(): # Met à jour l'afficheur avec la valeur actuelle du compteur global counter clearDisplay() pickDigit(0) hc595_shift(number[counter % 10]) clearDisplay() pickDigit(1) hc595_shift(number[counter % 100//10]) clearDisplay() pickDigit(2) hc595_shift(number[counter % 1000//100]) clearDisplay() pickDigit(3) hc595_shift(number[counter % 10000//1000])
Définit la boucle principale où l’affichage est continuellement mis à jour et l’état du capteur PIR est vérifié. Si un mouvement est détecté, le compteur est incrémenté.
def loop(): # Boucle principale pour mettre à jour l'affichage et vérifier la détection de mouvement global counter currentState = 0 lastState = 0 while True: display() currentState = 1 if pir.motion_detected else 0 if currentState == 1 and lastState == 0: counter += 1 lastState = currentState
Exécute la boucle principale et assure une interruption du script proprement avec la commande clavier (Ctrl+C), en éteignant toutes les broches avant de quitter.
try: loop() except KeyboardInterrupt: # Éteint toutes les broches lorsque le script est interrompu SDI.off() SRCLK.off() RCLK.off() pass