Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauche tiefer in Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten ein.
Warum beitreten?
Expertenunterstützung: Löse Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tausche Tipps und Tutorials aus, um deine Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalte frühzeitigen Zugang zu neuen Produktankündigungen und Vorschauen.
Sonderrabatte: Genieße exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Verlosungen: Nimm an Verlosungen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu erschaffen? Klicke auf [hier] und tritt noch heute bei!
3.1.8 Überhitzungsmonitor (MCP3008)
Bemerkung
Je nach Kit-Version bitte prüfen, ob ADC0834 oder MCP3008 enthalten ist, und mit dem entsprechenden Abschnitt fortfahren.
Einführung
Vielleicht möchtest du ein Überhitzungs-Überwachungsgerät bauen, das in verschiedenen Situationen eingesetzt werden kann – z. B. in einer Fabrik, um bei einer Überhitzung der Schaltung einen Alarm auszulösen und die Maschine rechtzeitig automatisch abzuschalten. In diesem Projekt verwenden wir einen Thermistor, einen Joystick, einen Summer, eine LED und ein LCD, um ein intelligentes Temperaturüberwachungsgerät mit einstellbarem Grenzwert zu bauen.
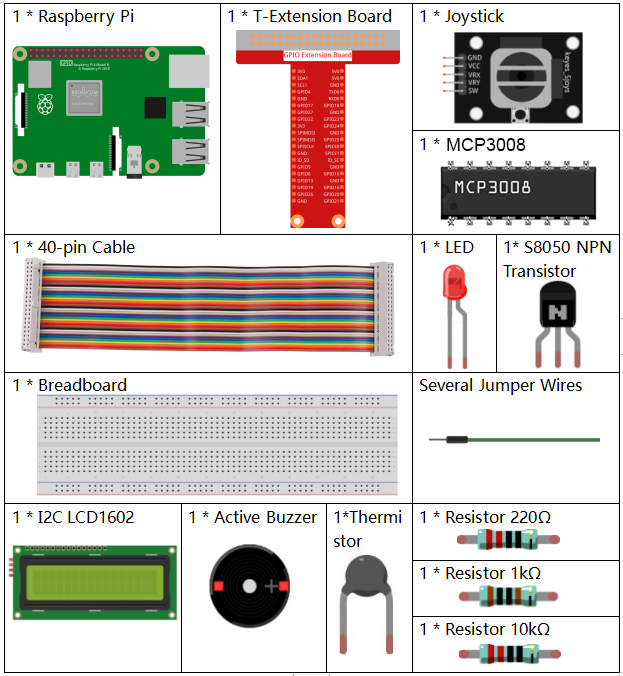
Benötigte Komponenten
In diesem Projekt benötigen wir die folgenden Komponenten:
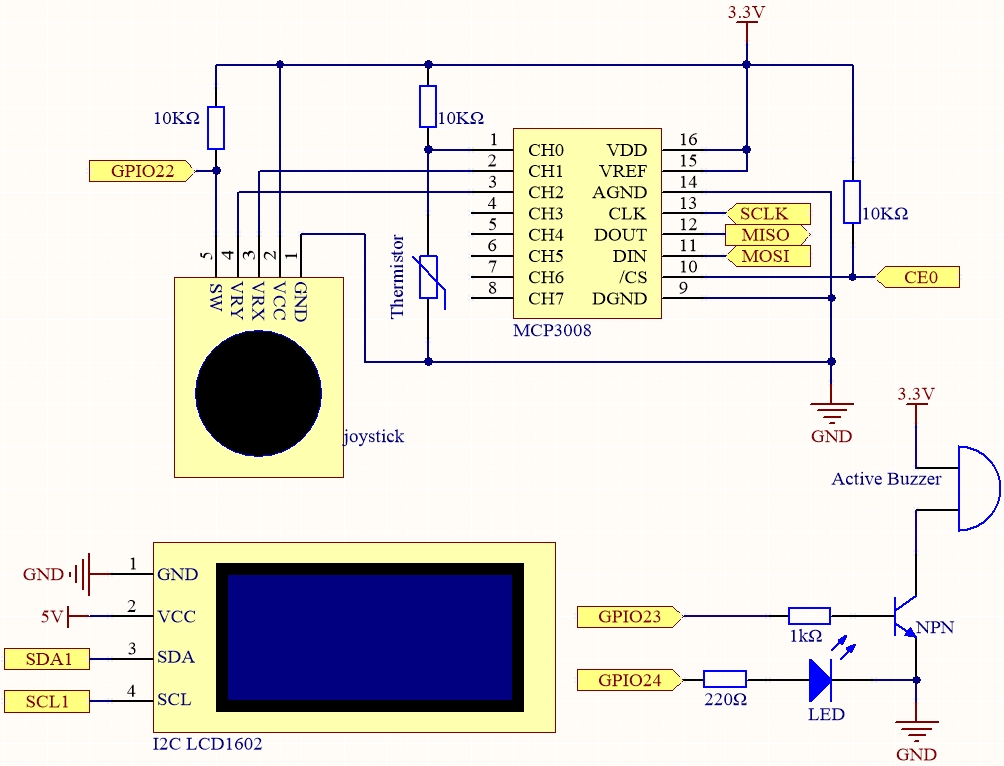
Schaltplan
T-Board-Name |
Physical |
WiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin15 |
3 |
22 |
GPIO23 |
Pin16 |
4 |
23 |
GPIO24 |
Pin18 |
5 |
24 |
SDA1 |
Pin 3 |
||
SCL1 |
Pin 5 |
Experimentelle Schritte
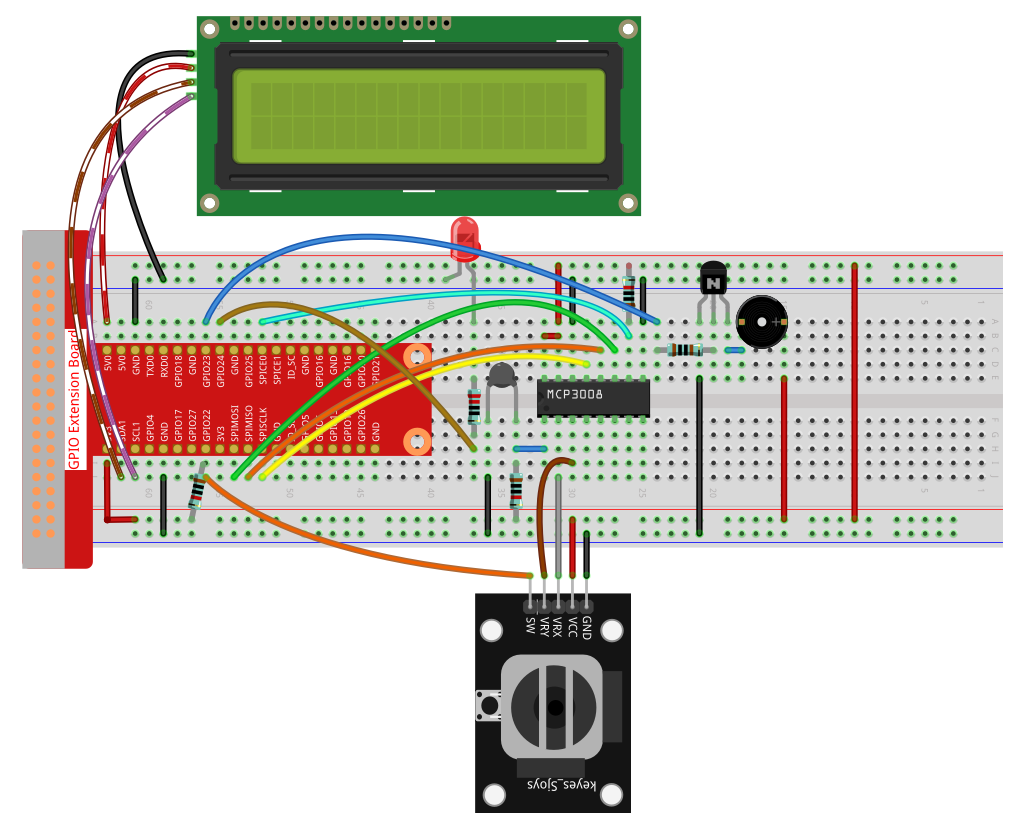
Schritt 1: Baue die Schaltung auf.
Schritt 2: Richte die SPI-Schnittstelle ein und installiere die spidev-Bibliothek (siehe SPI-Konfiguration für detaillierte Anweisungen). Falls diese Schritte bereits erledigt sind, kannst du sie überspringen.
Schritt 3: Wechsle in den Ordner mit dem Code.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Schritt 4: Führe die Programmdatei aus.
sudo python3 3.1.8-2_OverheatMonitor_zero.py
Während der Code läuft, werden die aktuelle Temperatur und der hohe Temperaturgrenzwert 40 auf dem I2C LCD1602 angezeigt. Wenn die aktuelle Temperatur höher als der Grenzwert ist, werden der Summer und die LED eingeschaltet, um dich zu warnen.
Der Joystick dient hier dazu, den hohen Temperaturgrenzwert einzustellen. Das Bewegen des Joysticks in X- oder Y-Richtung passt den Grenzwert nach oben oder unten an. Durch erneutes Drücken des Joysticks wird der Grenzwert auf den Anfangswert zurückgesetzt.
Bemerkung
Falls der Fehler
FileNotFoundError: [Errno 2] No such file or directory: '/dev/i2c-1'auftritt, siehe I²C-Konfiguration, um I²C zu aktivieren.Falls der Fehler
ModuleNotFoundError: No module named 'smbus2'auftritt, führesudo apt install python3-smbus2aus.Falls der Fehler
OSError: [Errno 121] Remote I/O errorauftritt, ist das Modul falsch verdrahtet oder defekt.Falls Code und Verdrahtung korrekt sind, aber das LCD dennoch nichts anzeigt, kann der Potentiometer auf der Rückseite zur Erhöhung des Kontrasts gedreht werden.
Warnung
Falls die Fehlermeldung RuntimeError: Cannot determine SOC peripheral base address erscheint, siehe Wenn gpiozero nicht funktioniert.
Code
Bemerkung
Du kannst den folgenden Code Ändern/Zurücksetzen/Kopieren/Ausführen/Stoppen.
Vorher musst du jedoch in das Quellcode-Verzeichnis wechseln (z. B. davinci-kit-for-raspberry-pi/python).
Nach einer Änderung kannst du den Code direkt ausführen, um den Effekt zu sehen.
#!/usr/bin/env python3
import LCD1602
from gpiozero import LED, Buzzer, Button
import spidev
import time
import math
# Joystick-Taste, Summer und LED initialisieren
Joy_BtnPin = Button(22) # GPIO22, Pin15
buzzPin = Buzzer(23) # GPIO23, Pin16
ledPin = LED(24) # GPIO24, Pin18
# Anfangswert für obere Temperaturgrenze
upperTem = 40
# SPI für MCP3008 initialisieren (Bus 0, CE0 -> GPIO8 / Pin24)
spi = spidev.SpiDev()
spi.open(0, 0)
spi.max_speed_hz = 1000000 # 1 MHz
# LCD initialisieren (I2C-Adresse 0x27, Hintergrundbeleuchtung an)
LCD1602.init(0x27, 1)
def read_adc(channel):
"""
Liest den analogen Wert vom MCP3008 (0–7).
"""
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
def get_joystick_value():
"""
Liest die Joystick-Werte und gibt eine Änderungszahl je nach Joystick-Position zurück.
"""
x_val = read_adc(1)
y_val = read_adc(2)
if x_val > 800:
return 1
elif x_val < 200:
return -1
elif y_val > 800:
return -10
elif y_val < 200:
return 10
else:
return 0
def upper_tem_setting():
"""
Passt die obere Temperaturgrenze an und zeigt sie auf dem LCD an.
"""
global upperTem
LCD1602.write(0, 0, 'Upper Adjust: ')
change = int(get_joystick_value())
upperTem += change
strUpperTem = str(upperTem)
LCD1602.write(0, 1, strUpperTem)
LCD1602.write(len(strUpperTem), 1, ' ')
time.sleep(0.1)
def temperature():
"""
Liest die aktuelle Temperatur vom Sensor und gibt sie in Celsius zurück.
"""
analogVal = read_adc(0)
Vr = 3.3 * analogVal / 1023.0 # Spannung über dem Festwiderstand
if Vr == 0:
return 0 # Division durch Null vermeiden
Rt = 10000.0 * Vr / (3.3 - Vr) # Angepasste Formel
temp = 1 / (((math.log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0)))
Cel = temp - 273.15
return round(Cel, 2)
def monitoring_temp():
"""
Überwacht und zeigt die aktuelle Temperatur und die obere Temperaturgrenze an.
Aktiviert Summer und LED, wenn die Temperatur die Obergrenze überschreitet.
"""
global upperTem
Cel = temperature()
LCD1602.write(0, 0, 'Temp: ')
LCD1602.write(0, 1, 'Upper: ')
LCD1602.write(6, 0, str(Cel))
LCD1602.write(7, 1, str(upperTem))
time.sleep(0.1)
if Cel >= upperTem:
buzzPin.on()
ledPin.on()
else:
buzzPin.off()
ledPin.off()
# Hauptprogrammschleife
try:
lastState = 1
stage = 0
while True:
currentState = Joy_BtnPin.value
if currentState == 1 and lastState == 0:
stage = (stage + 1) % 2
time.sleep(0.1)
LCD1602.clear()
lastState = currentState
if stage == 1:
upper_tem_setting()
else:
monitoring_temp()
except KeyboardInterrupt:
LCD1602.clear()
spi.close()
Code-Erklärung
Importiert die benötigten Bibliotheken.
LCD1602für das LCD-Display über I²C,gpiozerofür LED, Summer und Taste,spidevfür die Kommunikation mit dem MCP3008, sowietimeundmathfür Verzögerungen und Temperaturberechnungen.#!/usr/bin/env python3 import LCD1602 from gpiozero import LED, Buzzer, Button import spidev import time import math
Initialisiert die Hardwarekomponenten:
Button(22)für die Joystick-TasteBuzzer(23)undLED(24)als Ausgabesignale für hohe Temperatur
Joy_BtnPin = Button(22) # GPIO22, Pin15 buzzPin = Buzzer(23) # GPIO23, Pin16 ledPin = LED(24) # GPIO24, Pin18
Setzt den Standard-Grenzwert für die obere Temperatur und initialisiert SPI sowie LCD1602.
upperTem = 40 spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000 LCD1602.init(0x27, 1)
read_adc(channel)liest den analogen Wert (0–1023) vom MCP3008-Kanal.def read_adc(channel): if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
get_joystick_value()wertet die Joystick-Position (Kanäle 1 und 2) aus und gibt je nach Richtung Anpassungswerte zurück.def get_joystick_value(): x_val = read_adc(1) y_val = read_adc(2) if x_val > 800: return 1 elif x_val < 200: return -1 elif y_val > 800: return -10 elif y_val < 200: return 10 else: return 0
upper_tem_setting()passt den oberen Temperaturgrenzwert an und zeigt ihn auf dem LCD an.def upper_tem_setting(): global upperTem LCD1602.write(0, 0, 'Upper Adjust: ') change = int(get_joystick_value()) upperTem += change strUpperTem = str(upperTem) LCD1602.write(0, 1, strUpperTem) LCD1602.write(len(strUpperTem), 1, ' ') time.sleep(0.1)
temperature()berechnet die Temperatur in °C anhand der Steinhart–Hart-Approximation.def temperature(): """ Reads the current temperature from the sensor and returns it in Celsius. """ analogVal = read_adc(0) Vr = 3.3 * analogVal / 1023.0 # Voltage across the fixed resistor if Vr == 0: return 0 # Prevent division by zero Rt = 10000.0 * Vr / (3.3 - Vr) # Adjusted formula: thermistor voltage is (3.3 - Vr) temp = 1 / (((math.log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0))) Cel = temp - 273.15 return round(Cel, 2)
monitoring_temp()überwacht die Temperatur, vergleicht sie mit dem Grenzwert, zeigt beide Werte an und schaltet Summer/LED ein, wenn der Grenzwert überschritten wird.def monitoring_temp(): global upperTem Cel = temperature() LCD1602.write(0, 0, 'Temp: ') LCD1602.write(0, 1, 'Upper: ') LCD1602.write(6, 0, str(Cel)) LCD1602.write(7, 1, str(upperTem)) time.sleep(0.1) if Cel >= upperTem: buzzPin.on() ledPin.on() else: buzzPin.off() ledPin.off()
Die Hauptschleife schaltet mit der Joystick-Taste zwischen Einstell- und Überwachungsmodus um.
try: lastState = 1 stage = 0 while True: currentState = Joy_BtnPin.value if currentState == 1 and lastState == 0: stage = (stage + 1) % 2 time.sleep(0.1) LCD1602.clear() lastState = currentState if stage == 1: upper_tem_setting() else: monitoring_temp()
Bei Programmende werden LCD geleert und SPI-Verbindung geschlossen.
except KeyboardInterrupt: LCD1602.clear() spi.close()