Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
3.1.4 Intelligenter Ventilator
Bemerkung
Je nach deiner Kit-Version überprüfe bitte, ob du ADC0834 oder MCP3008 hast, und fahre mit dem entsprechenden Abschnitt fort.
Einführung
In diesem Projekt werden wir Motoren, Tasten und Thermistoren verwenden, um einen manuellen + automatischen intelligenten Ventilator zu bauen, dessen Windgeschwindigkeit einstellbar ist.
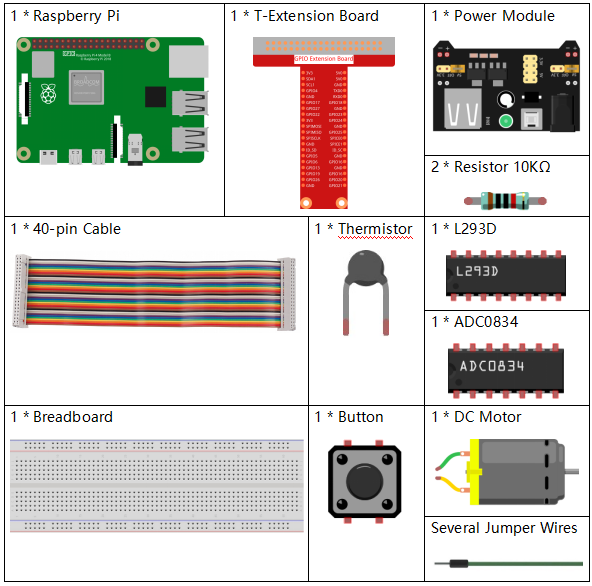
Benötigte Komponenten
Für dieses Projekt benötigen wir folgende Komponenten.
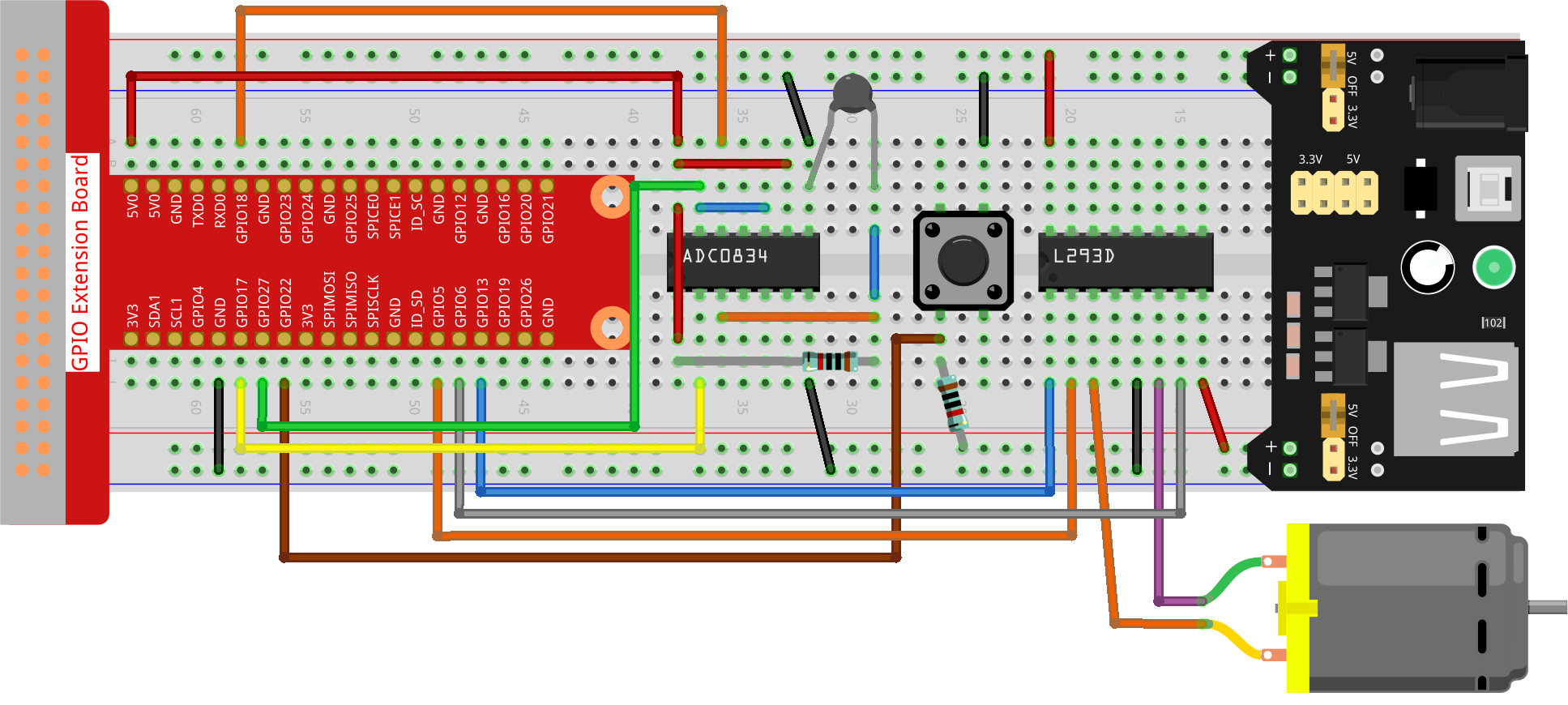
Schaltplan
T-Board Name |
physisch |
wiringPi |
BCM |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |

Experimentelle Verfahren
Schritt 1: Bauen Sie den Schaltkreis.
Bemerkung
Das Powermodul kann mit dem 9V-Batterieclip im Kit eine 9V-Batterie verwenden. Stecken Sie den Jumper des Powermoduls in die 5V-Steckleisten des Steckbretts.

Schritt 2: Wechseln Sie in den Ordner des Codes.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Schritt 3: Ausführen.
sudo python3 3.1.4_SmartFan_zero.py
Wenn der Code ausgeführt wird, starten Sie den Ventilator, indem Sie die Taste drücken. Jedes Mal, wenn Sie drücken, wird die Geschwindigkeitsstufe um 1 erhöht oder verringert. Es gibt 5 Geschwindigkeitsstufen: 0~4. Wenn Sie auf die 4. Stufe eingestellt sind und die Taste drücken, stoppt der Ventilator und zeigt eine Windgeschwindigkeit von 0 an.
Steigt oder fällt die Temperatur um mehr als 2℃, wird die Geschwindigkeit automatisch um 1 Stufe schneller oder langsamer eingestellt.
Code
Bemerkung
Sie können den untenstehenden Code modifizieren/zurücksetzen/kopieren/ausführen/stoppen. Bevor Sie dies tun, sollten Sie jedoch zum Quellcodepfad wie davinci-kit-for-raspberry-pi/python-pi5 wechseln. Nachdem Sie den Code geändert haben, können Sie ihn direkt ausführen, um das Ergebnis zu sehen.
#!/usr/bin/env python3
from gpiozero import Motor, Button
from time import sleep
import ADC0834
import math
# Initialisierung der GPIO-Pins für die Taste und die Motorsteuerung
BtnPin = Button(22)
motor = Motor(forward=5, backward=6, enable=13)
# Initialisierung des ADC0834-Moduls für die Temperaturmessung
ADC0834.setup()
# Initialisierung von Variablen zur Überwachung der Motordrehzahl und Temperaturen
level = 0
currentTemp = 0
markTemp = 0
def temperature():
"""
Liest und berechnet die aktuelle Temperatur vom Sensor.
Rückgabe:
float: Die aktuelle Temperatur in Celsius.
"""
# Analogwert vom ADC0834-Modul lesen
analogVal = ADC0834.getResult()
# Analogwert in Spannung und dann in Widerstand umwandeln
Vr = 5 * float(analogVal) / 255
Rt = 10000 * Vr / (5 - Vr)
# Temperatur in Celsius berechnen
temp = 1 / (((math.log(Rt / 10000)) / 3950) + (1 / (273.15 + 25)))
Cel = temp - 273.15
return Cel
def motor_run(level):
"""
Passt die Motorgeschwindigkeit an das angegebene Niveau an.
Argumente:
level (int): Gewünschtes Motorgeschwindigkeitsniveau.
Rückgabe:
int: Angepasstes Motorgeschwindigkeitsniveau.
"""
# Motor stoppen, wenn das Niveau 0 ist
if level == 0:
motor.stop()
return 0
# Niveau auf 4 begrenzen für maximale Geschwindigkeit
if level >= 4:
level = 4
# Motorgeschwindigkeit einstellen
motor.forward(speed=float(level / 4))
return level
def changeLevel():
"""
Ändert das Motorgeschwindigkeitsniveau, wenn die Taste gedrückt wird, und aktualisiert die Referenztemperatur.
"""
global level, currentTemp, markTemp
print("Taste gedrückt")
# Durch die Niveaus 0-4 zyklisch wechseln
level = (level + 1) % 5
# Referenztemperatur aktualisieren
markTemp = currentTemp
# Die Taste mit der Funktion changeLevel verbinden
BtnPin.when_pressed = changeLevel
def main():
"""
Hauptfunktion zur kontinuierlichen Überwachung und Reaktion auf Temperaturänderungen.
"""
global level, currentTemp, markTemp
# Anfängliche Referenztemperatur setzen
markTemp = temperature()
while True:
# Aktuelle Temperatur kontinuierlich lesen
currentTemp = temperature()
# Motorniveau anhand der Temperaturdifferenz anpassen
if level != 0:
if currentTemp - markTemp <= -2:
level -= 1
markTemp = currentTemp
elif currentTemp - markTemp >= 2:
if level < 4:
level += 1
markTemp = currentTemp
# Motor auf angepasstem Niveau betreiben
level = motor_run(level)
# Die Hauptfunktion ausführen und auf KeyboardInterrupt reagieren
try:
main()
except KeyboardInterrupt:
# Motor stoppen, wenn das Skript unterbrochen wird
motor.stop()
Code-Erklärung
Importiert Klassen zur Steuerung eines Motors und einer Taste sowie die Sleep-Funktion für Pausen. Außerdem wird die ADC0834-Bibliothek für die Temperaturmessung und die Math-Bibliothek für mathematische Berechnungen importiert.
#!/usr/bin/env python3 from gpiozero import Motor, Button from time import sleep import ADC0834 import math
Richtet die Taste an GPIO-Pin 22 ein und konfiguriert den Motor mit spezifischen GPIO-Pins zur Steuerung. Initialisiert das ADC0834-Modul zur Temperaturmessung. Außerdem werden Variablen initialisiert, um die Motordrehzahl und Temperaturen zu überwachen.
# Initialisierung der GPIO-Pins für die Taste und die Motorsteuerung BtnPin = Button(22) motor = Motor(forward=5, backward=6, enable=13) # Initialisierung des ADC0834-Moduls für die Temperaturmessung ADC0834.setup() # Initialisierung von Variablen zur Überwachung der Motordrehzahl und Temperaturen level = 0 currentTemp = 0 markTemp = 0
Definiert eine Funktion zur Ablesung und Berechnung der Temperatur vom Sensor, die den Messwert in Celsius umwandelt.
def temperature(): """ Liest und berechnet die aktuelle Temperatur vom Sensor. Rückgabe: float: Die aktuelle Temperatur in Celsius. """ # Analogwert vom ADC0834-Modul lesen analogVal = ADC0834.getResult() # Analogwert in Spannung und dann in Widerstand umwandeln Vr = 5 * float(analogVal) / 255 Rt = 10000 * Vr / (5 - Vr) # Temperatur in Celsius berechnen temp = 1 / (((math.log(Rt / 10000)) / 3950) + (1 / (273.15 + 25))) Cel = temp - 273.15 return Cel
Führt eine Funktion ein, um die Motorgeschwindigkeit entsprechend dem angegebenen Niveau anzupassen.
def motor_run(level): """ Passt die Motorgeschwindigkeit an das angegebene Niveau an. Argumente: level (int): Gewünschtes Motorgeschwindigkeitsniveau. Rückgabe: int: Angepasstes Motorgeschwindigkeitsniveau. """ # Motor stoppen, wenn das Niveau 0 ist if level == 0: motor.stop() return 0 # Niveau auf 4 begrenzen für maximale Geschwindigkeit if level >= 4: level = 4 # Motorgeschwindigkeit einstellen motor.forward(speed=float(level / 4)) return level
Implementiert eine Funktion, um das Motorgeschwindigkeitsniveau manuell mithilfe einer Taste zu ändern und bindet diese Funktion an das Drücken der Taste.
def changeLevel(): """ Ändert das Motorgeschwindigkeitsniveau, wenn die Taste gedrückt wird, und aktualisiert die Referenztemperatur. """ global level, currentTemp, markTemp print("Taste gedrückt") # Durch die Niveaus 0-4 zyklisch wechseln level = (level + 1) % 5 # Referenztemperatur aktualisieren markTemp = currentTemp # Die Taste mit der Funktion changeLevel verbinden BtnPin.when_pressed = changeLevel
Die Hauptfunktion, die entwickelt wurde, um die Motorgeschwindigkeit kontinuierlich in Reaktion auf Temperaturschwankungen anzupassen, muss noch implementiert werden.
def main(): """ Hauptfunktion zur kontinuierlichen Überwachung und Reaktion auf Temperaturänderungen. """ global level, currentTemp, markTemp # Anfängliche Referenztemperatur setzen markTemp = temperature() while True: # Aktuelle Temperatur kontinuierlich lesen currentTemp = temperature() # Motorniveau anhand der Temperaturdifferenz anpassen if level != 0: if currentTemp - markTemp <= -2: level -= 1 markTemp = currentTemp elif currentTemp - markTemp >= 2: if level < 4: level += 1 markTemp = currentTemp # Motor auf angepasstem Niveau betreiben level = motor_run(level)
Führt die Hauptfunktion aus und stellt sicher, dass der Motor stoppt, wenn das Skript unterbrochen wird.
# Die Hauptfunktion ausführen und auf KeyboardInterrupt reagieren try: main() except KeyboardInterrupt: # Motor stoppen, wenn das Skript unterbrochen wird motor.stop()