Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauche tiefer in Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten ein.
Warum beitreten?
Expertenunterstützung: Löse Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tausche Tipps und Tutorials aus, um deine Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalte frühzeitigen Zugang zu neuen Produktankündigungen und Vorschauen.
Sonderrabatte: Genieße exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Verlosungen: Nimm an Verlosungen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu erschaffen? Klicke auf [hier] und tritt noch heute bei!
3.1.4 Intelligenter Ventilator (MCP3008)
Bemerkung
Je nach Kit-Version bitte prüfen, ob ADC0834 oder MCP3008 enthalten ist, und mit dem entsprechenden Abschnitt fortfahren.
Einführung
In diesem Projekt werden wir Motoren, Tasten und Thermistoren verwenden, um einen manuellen + automatischen intelligenten Ventilator mit einstellbarer Windgeschwindigkeit zu bauen.
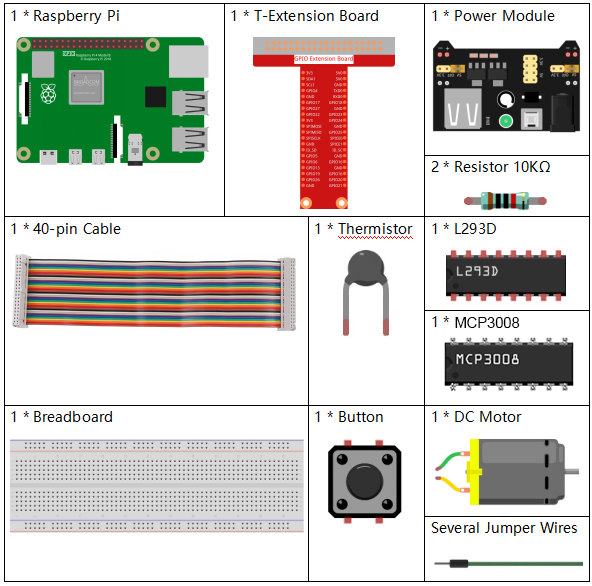
Benötigte Komponenten
In diesem Projekt benötigen wir die folgenden Komponenten.
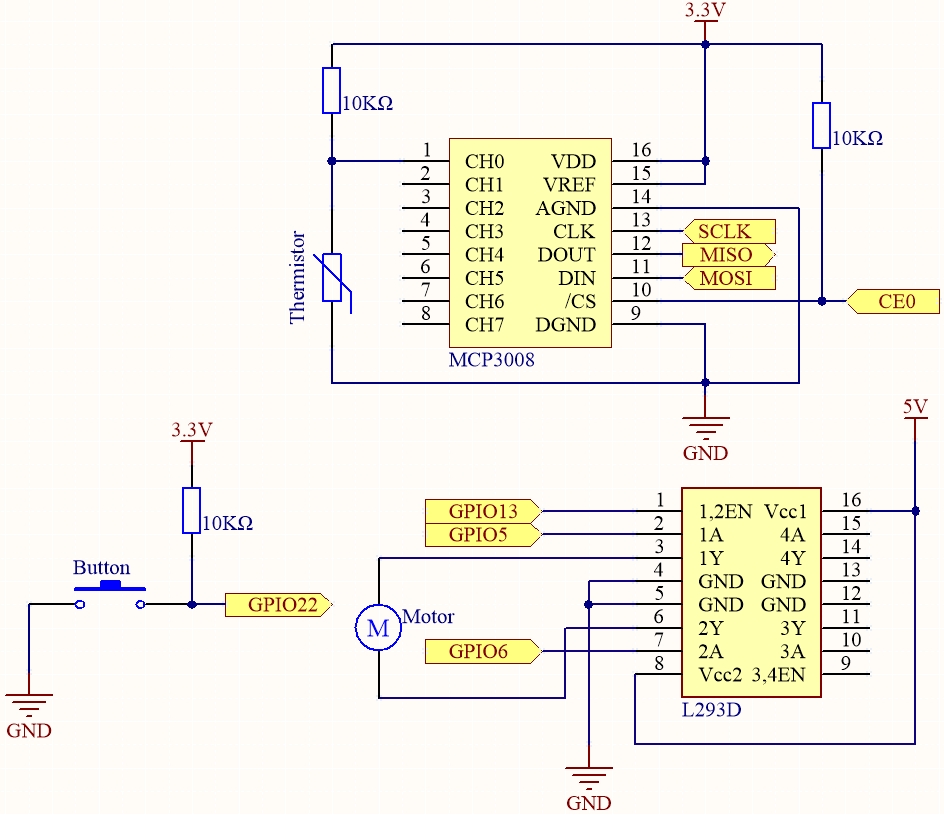
Schaltplan
T-Board-Name |
Physical |
WiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |
Experimentelle Schritte
Schritt 1: Baue die Schaltung auf.
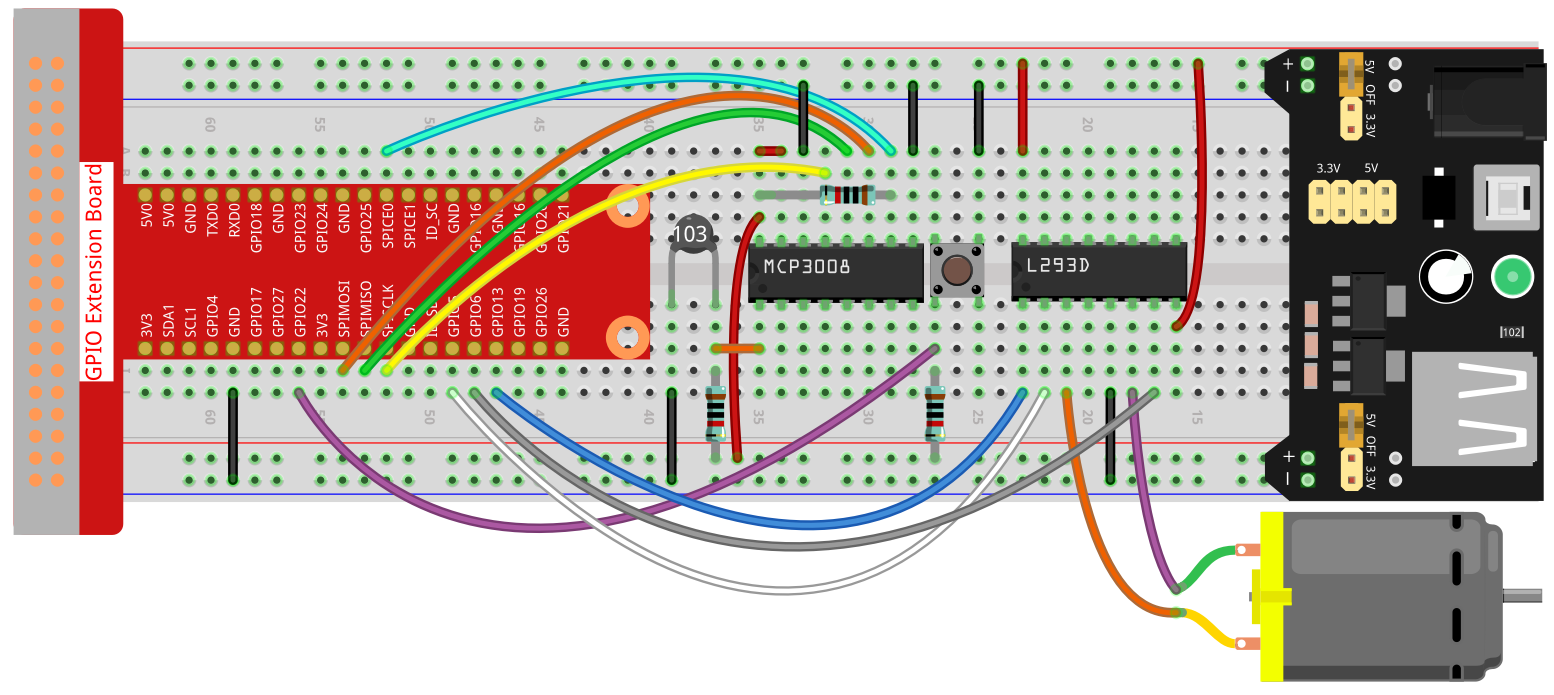
Bemerkung
Das Strommodul kann mit einer 9V-Batterie und dem im Kit enthaltenen 9V-Batterieclip betrieben werden.

Schritt 2: Richte die SPI-Schnittstelle ein und installiere die spidev-Bibliothek (siehe SPI-Konfiguration für detaillierte Anweisungen). Falls diese Schritte bereits erledigt sind, kannst du sie überspringen.
Schritt 3: Wechsle in den Ordner mit dem Code.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Schritt 4: Ausführen.
sudo python3 3.1.4-2_SmartFan_zero.py
Wenn der Code läuft, starte den Ventilator durch Drücken der Taste. Jedes Mal, wenn du drückst, wird die Geschwindigkeit um eine Stufe erhöht oder verringert. Es gibt 5 Geschwindigkeitsstufen: 0~4. Wenn die 4te Stufe eingestellt ist und du erneut drückst, stoppt der Ventilator mit einer Windgeschwindigkeit von 0.
Sobald die Temperatur um mehr als 2℃ steigt oder fällt, erhöht oder verringert sich die Geschwindigkeit automatisch um eine Stufe.
Code
Bemerkung
Du kannst den folgenden Code Ändern/Zurücksetzen/Kopieren/Ausführen/Stoppen.
Vorher musst du jedoch in das Quellcode-Verzeichnis (z. B. davinci-kit-for-raspberry-pi/python-pi5) wechseln.
Nach einer Änderung kannst du den Code direkt ausführen, um den Effekt zu sehen.
#!/usr/bin/env python3
from gpiozero import Motor, Button
from time import sleep
import spidev
import math
# SPI für MCP3008 initialisieren
spi = spidev.SpiDev()
spi.open(0, 0) # Bus 0, CE0 (GPIO8 / physikalischer Pin 24)
spi.max_speed_hz = 1000000 # 1 MHz
# GPIO-Pins für Taste und Motorsteuerung initialisieren
BtnPin = Button(22) # GPIO22 (physikalischer Pin 15)
motor = Motor(forward=5, backward=6, enable=13) # GPIO5, GPIO6, GPIO13
# Variablen für Geschwindigkeitsstufe und Temperatur
level = 0
currentTemp = 0
markTemp = 0
def read_adc(channel):
"""
Liest den analogen Wert vom MCP3008-Kanal (0–7).
"""
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
def temperature():
"""
Liest und berechnet die aktuelle Temperatur vom Sensor.
Rückgabe:
float: Aktuelle Temperatur in Celsius.
"""
analogVal = read_adc(0) # Thermistor an CH0
Vr = 3.3 * analogVal / 1023.0 # Für 3,3V-System
Rt = 10000.0 * Vr / (3.3 - Vr)
temp = 1 / (((math.log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0)))
Cel = temp - 273.15
return Cel
def motor_run(level):
"""
Stellt die Motorgeschwindigkeit basierend auf der angegebenen Stufe ein.
Argumente:
level (int): Gewünschte Motorgeschwindigkeitsstufe.
Rückgabe:
int: Angepasste Motorgeschwindigkeitsstufe.
"""
if level == 0:
motor.stop()
return 0
if level >= 4:
level = 4
motor.forward(speed=float(level / 4))
return level
def changeLevel():
"""
Ändert die Motorgeschwindigkeitsstufe bei Tastendruck und aktualisiert die Referenztemperatur.
"""
global level, currentTemp, markTemp
print("Taste gedrückt")
level = (level + 1) % 5
markTemp = currentTemp
# Taste mit changeLevel-Funktion verknüpfen
BtnPin.when_pressed = changeLevel
def main():
"""
Hauptfunktion zur kontinuierlichen Temperaturüberwachung und Anpassung der Motorgeschwindigkeit.
"""
global level, currentTemp, markTemp
markTemp = temperature()
while True:
currentTemp = temperature()
if level != 0:
if currentTemp - markTemp <= -2:
level -= 1
markTemp = currentTemp
elif currentTemp - markTemp >= 2:
if level < 4:
level += 1
markTemp = currentTemp
level = motor_run(level)
sleep(0.2)
# Hauptfunktion ausführen und bei Tastenkombination Strg+C sauber beenden
try:
main()
except KeyboardInterrupt:
motor.stop()
spi.close()
Code-Erklärung
Importiert Bibliotheken zur Steuerung von Motor und Taste, für die SPI-Kommunikation mit MCP3008 sowie mathematische Berechnungen.
gpiozerosteuert die GPIO-Geräte,spidevdie SPI-Kommunikation mit dem MCP3008-ADC, undmathwird für Temperaturberechnungen aus Widerstandswerten verwendet.from gpiozero import Motor, Button from time import sleep import spidev import math
Initialisiert die SPI-Kommunikation auf Bus 0, Gerät 0 (CE0) für den MCP3008-ADC.
spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000
Richtet GPIO-Pin 22 als Taste ein und konfiguriert den Motor mit GPIO5 (vorwärts), GPIO6 (rückwärts) und GPIO13 (Enable). Legt außerdem Variablen zur Verfolgung der Geschwindigkeitsstufe und Temperatur fest.
BtnPin = Button(22) motor = Motor(forward=5, backward=6, enable=13) level = 0 currentTemp = 0 markTemp = 0
Funktion zum Auslesen eines analogen Wertes (0–1023) vom MCP3008 über SPI.
def read_adc(channel): if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
Funktion zum Messen der Temperatur über den Thermistor an CH0. Wandelt den ADC-Wert in Spannung um, berechnet den Widerstand und dann die Temperatur in °C (Steinhart-Hart).
def temperature(): analogVal = read_adc(0) Vr = 3.3 * analogVal / 1023.0 Rt = 10000.0 * Vr / (3.3 - Vr) temp = 1 / (((math.log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0))) Cel = temp - 273.15 return Cel
Funktion zur Einstellung der Motorgeschwindigkeit basierend auf
level(0–4). Bei 0 stoppt der Motor, bei 1–4 wird die PWM-Geschwindigkeit proportional gesetzt.def motor_run(level): if level == 0: motor.stop() return 0 if level >= 4: level = 4 motor.forward(speed=float(level / 4)) return level
Event-Handler für Tastendruck: erhöht die Geschwindigkeitsstufe zyklisch von 0 bis 4 und aktualisiert die Referenztemperatur.
def changeLevel(): global level, currentTemp, markTemp level = (level + 1) % 5 markTemp = currentTemp BtnPin.when_pressed = changeLevel
Hauptschleife: überwacht kontinuierlich die Temperatur. Bei ±2°C Abweichung zur Referenz wird die Geschwindigkeitsstufe automatisch angepasst.
def main(): global level, currentTemp, markTemp markTemp = temperature() while True: currentTemp = temperature() if level != 0: if currentTemp - markTemp <= -2: level -= 1 markTemp = currentTemp elif currentTemp - markTemp >= 2: if level < 4: level += 1 markTemp = currentTemp level = motor_run(level) sleep(0.2)
Führt die Hauptfunktion aus und beendet Motor & SPI sauber bei Strg+C.
try: main() except KeyboardInterrupt: motor.stop() spi.close()