备注
你好,欢迎来到 SunFounder 树莓派、Arduino 和 ESP32 爱好者社区的 Facebook 页面!与其他爱好者一起深入探讨树莓派、Arduino 和 ESP32。
为什么加入?
专家支持: 通过我们的社区和团队的帮助解决售后问题和技术挑战。
学习与分享: 交流技巧和教程,提升你的技能。
独家预览: 提前了解新产品发布和预告。
特别折扣: 尊享我们最新产品的专属折扣。
节日促销和赠品: 参与赠品活动和节日促销。
👉 准备好与我们一起探索和创造了吗?点击 [这里] 加入我们吧!
第 10 课 舵机¶
介绍¶
伺服是一种只能旋转180度的减速电机。它是通过从你的电路板发送电脉冲来控制的。这些脉冲告诉伺服它应该移动到什么位置。
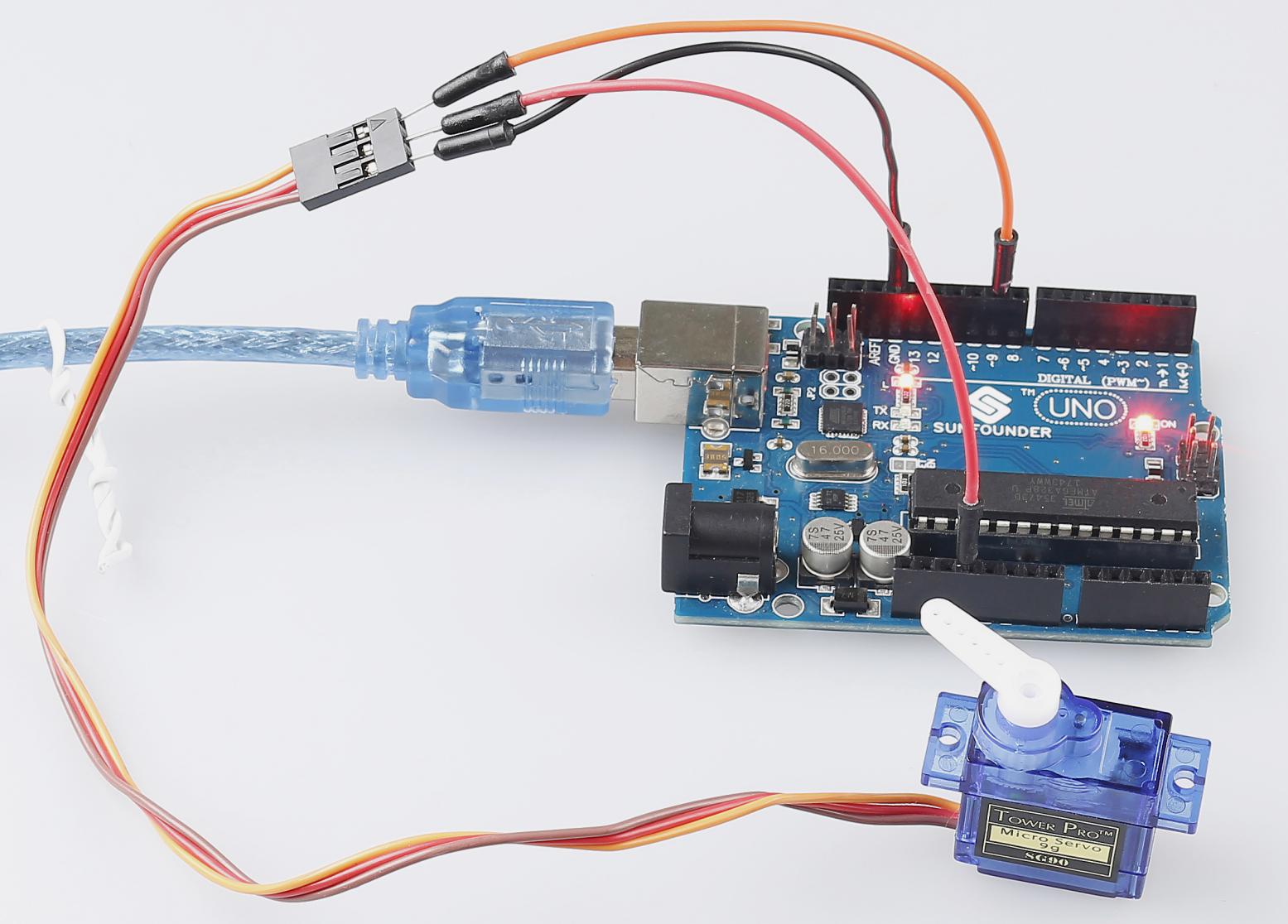
舵机有三根线:棕色线为GND,红色线为VCC,橙色线为信号线。
所需器件¶
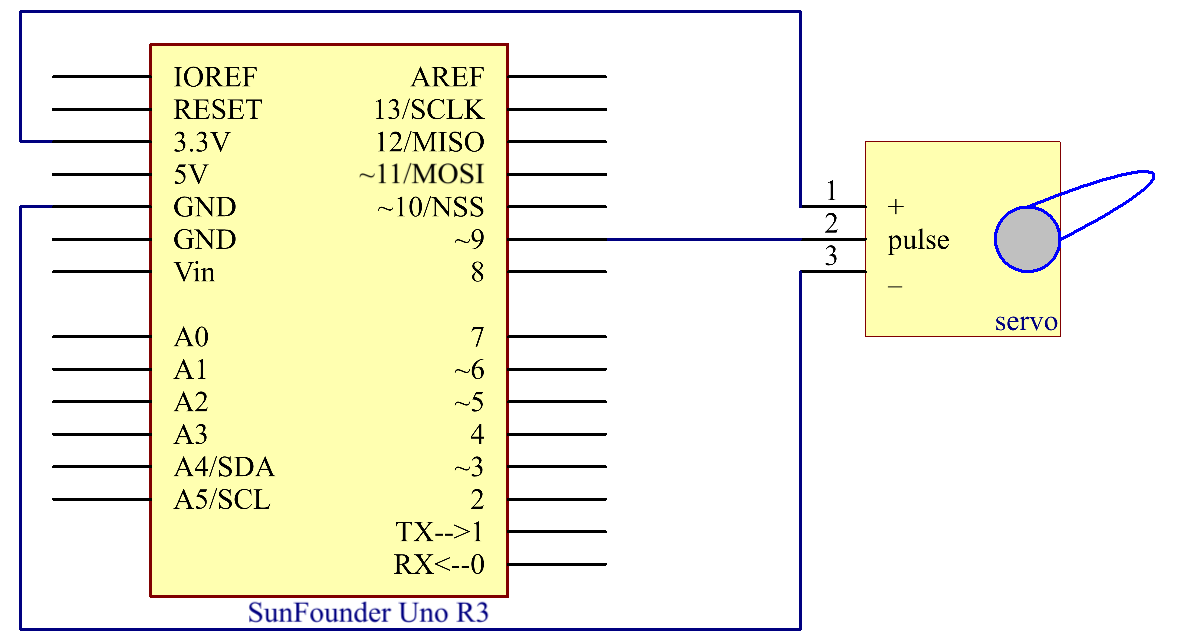
原理图¶
原理图如下所示:
实验步骤¶
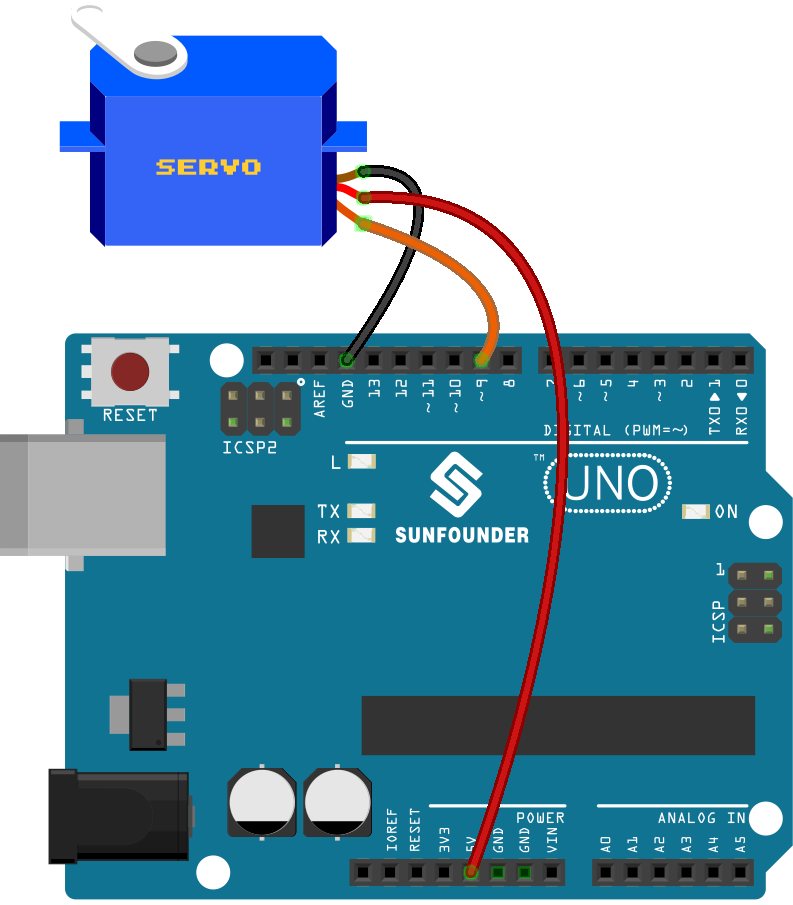
第 1 步:搭建电路。 (棕色连接到GND,橙色连接到9引脚,红色连接到5V)。
第 2 步:打开代码文件 Lesson_10_Servo.ino。
第 3 步:选择 开发板 和 端口。
第 4 步:点击 上传 按钮来上传代码。
现在,你可以看到舵机的摇臂旋转并停止在 90 度(每次 15 度)。然后它向相反的方向旋转。
代码¶
代码分析¶
添加一个库
#include <Servo.h>
Servo myservo; //create servo object to control a servo
导入 Servo.h 文件之后,你就可以在这个文件中的函数。 Servo 是 Arduino IDE 中的内置库。你可以在安装路径, 默认是 C:Program FilesArduinolibraries 下找到 Servo 文件夹。
初始化舵机
void setup()
{
myservo.attach(9); //attachs the servo on pin 9 to servo object
myservo.write(0); //back to 0 degrees
delay(1000); //wait for a second
}
myservo.attach():用来初始化舵机,并设置它的信号引脚。myservo.write():将一个值写入舵机,相应地控制它的轴。在一个标准的舵机上,这将设置轴的角度(度),将轴移到那个方向。这里让伺服机首先保持在0角度。
让舵机转动
void loop()
{
for (int i = 0; i <= 180; i++)
{
myservo.write(i); //write the i angle to the servo
delay(15); //delay 15ms
}
for (int i = 180; i >= 0; i--)
{
myservo.write(i); //write the i angle to the servo
delay(15); //delay 15ms
}
}
用2个 for() 语句将0-180写入舵机,这样就可以看到舵机从0转到180角,然后转回0。