备注
你好,欢迎来到 SunFounder 树莓派、Arduino 和 ESP32 爱好者社区的 Facebook 页面!与其他爱好者一起深入探讨树莓派、Arduino 和 ESP32。
为什么加入?
专家支持: 通过我们的社区和团队的帮助解决售后问题和技术挑战。
学习与分享: 交流技巧和教程,提升你的技能。
独家预览: 提前了解新产品发布和预告。
特别折扣: 尊享我们最新产品的专属折扣。
节日促销和赠品: 参与赠品活动和节日促销。
👉 准备好与我们一起探索和创造了吗?点击 [这里] 加入我们吧!
舵机¶

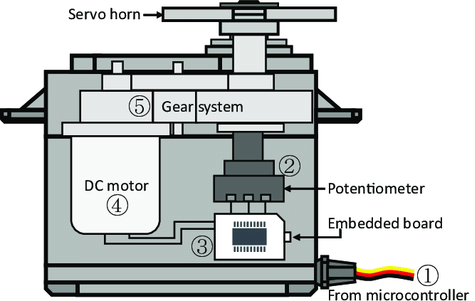
一个舵机一般由以下几部分组成:外壳、轴(Servo horn)、齿轮系统(Gear system)、电位器 (Potentiometer)、直流电机(DC Motor)和嵌入式板 (Embedded board)。
其工作原理是:微控制器向舵机发出PWM信号,然后舵机中的嵌入式板卡通过信号引脚接收信号并控制里面的电机转动。结果,电机驱动齿轮系统,然后在减速后驱动轴。舵机的轴和电位器连接在一起。当轴旋转时,它驱动电位器,因此电位器向嵌入式板输出电压信号。然后棋盘根据当前位置确定旋转的方向和速度,因此它可以准确地停在定义的正确位置并保持在那里。
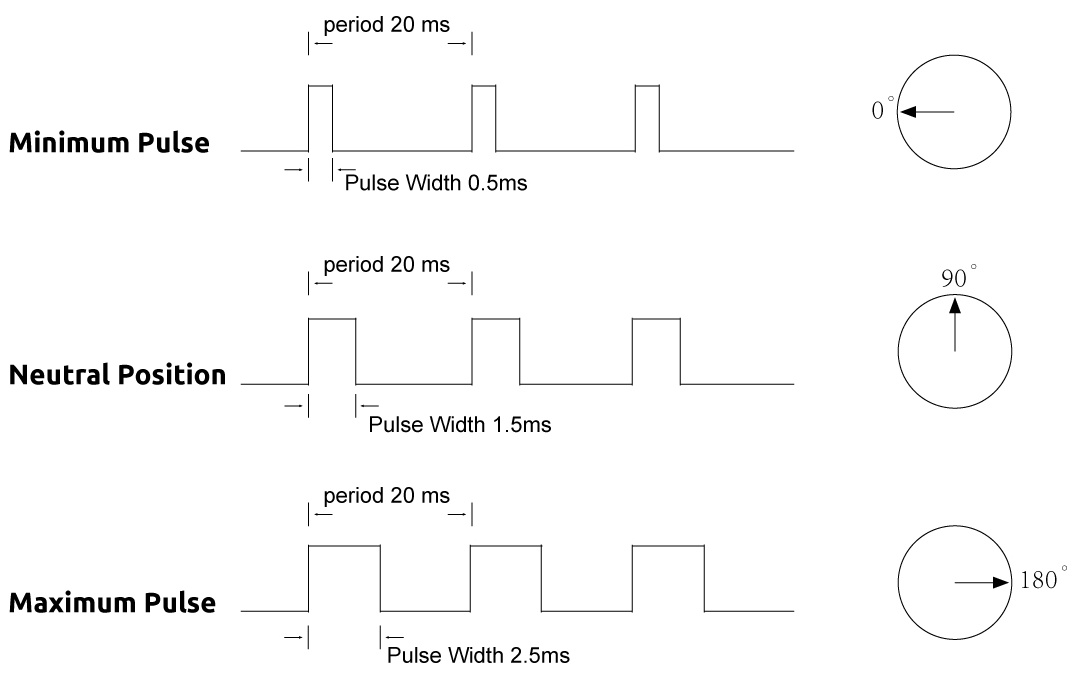
该角度由施加到控制线的脉冲持续时间决定。这称为脉宽调制。伺服器期望每 20 毫秒看到一个脉冲。脉冲的长度将决定电机转动的距离。例如,一个 1.5ms 的脉冲将使电机转动到 90 度位置(中立位置)。当一个小于 1.5 ms 的脉冲发送到伺服系统时,伺服系统会旋转到一个位置,并将其输出轴从中性点逆时针方向保持一定度数。当脉冲宽度超过 1.5 ms 时,情况正好相反。将命令舵机转向有效位置的最小脉冲宽度和最大脉冲宽度是每个舵机的功能。通常,最小脉冲宽度约为 0.5 毫秒,最大脉冲宽度约为 2.5 毫秒。
示例