备注
你好,欢迎来到 SunFounder 树莓派、Arduino 和 ESP32 爱好者社区的 Facebook 页面!与其他爱好者一起深入探讨树莓派、Arduino 和 ESP32。
为什么加入?
专家支持: 通过我们的社区和团队的帮助解决售后问题和技术挑战。
学习与分享: 交流技巧和教程,提升你的技能。
独家预览: 提前了解新产品发布和预告。
特别折扣: 尊享我们最新产品的专属折扣。
节日促销和赠品: 参与赠品活动和节日促销。
👉 准备好与我们一起探索和创造了吗?点击 [这里] 加入我们吧!
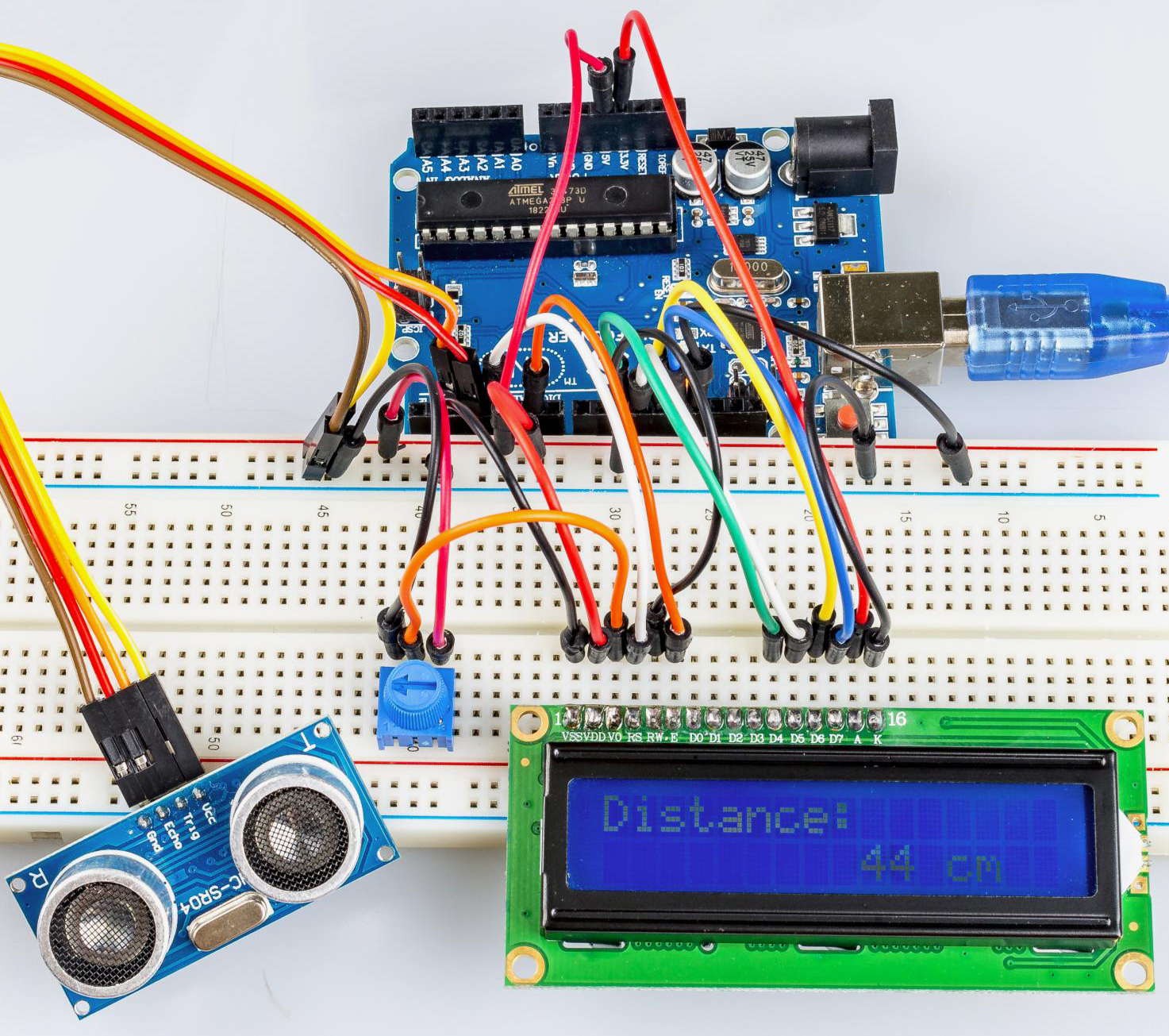
第 13 课 超声波¶
介绍¶
倒车时,你会看到汽车与周围障碍物之间的距离,以避免碰撞。检测距离的装置是超声波传感器。在本实验中,你将了解超声波如何检测距离。
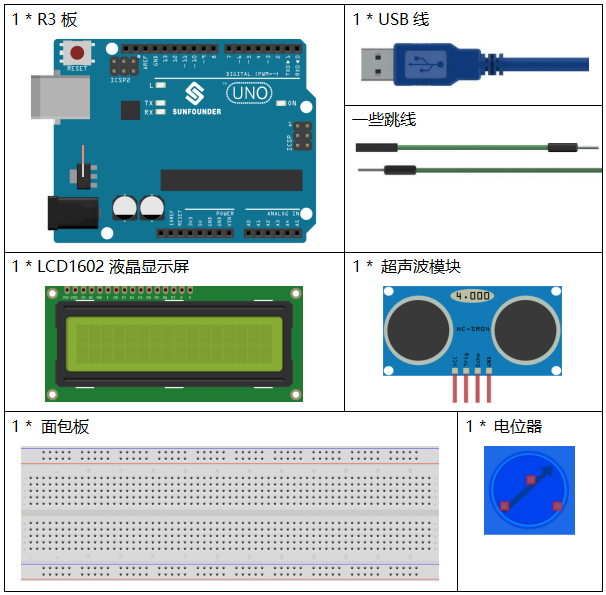
所需器件¶
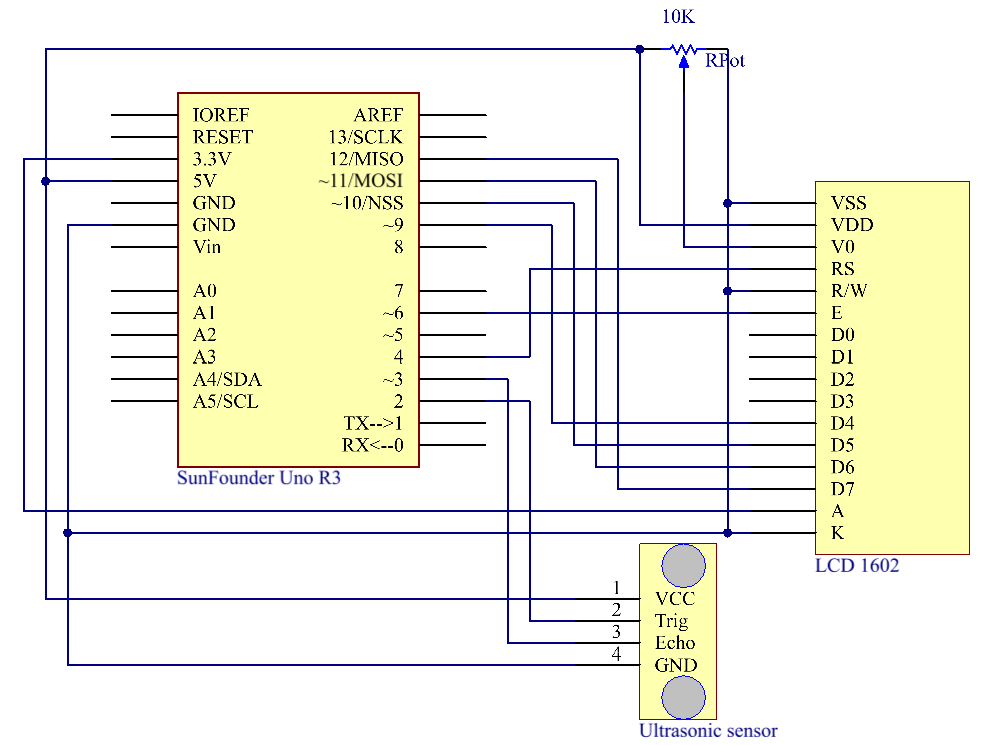
原理图¶
原理图如下所示:
实验步骤¶
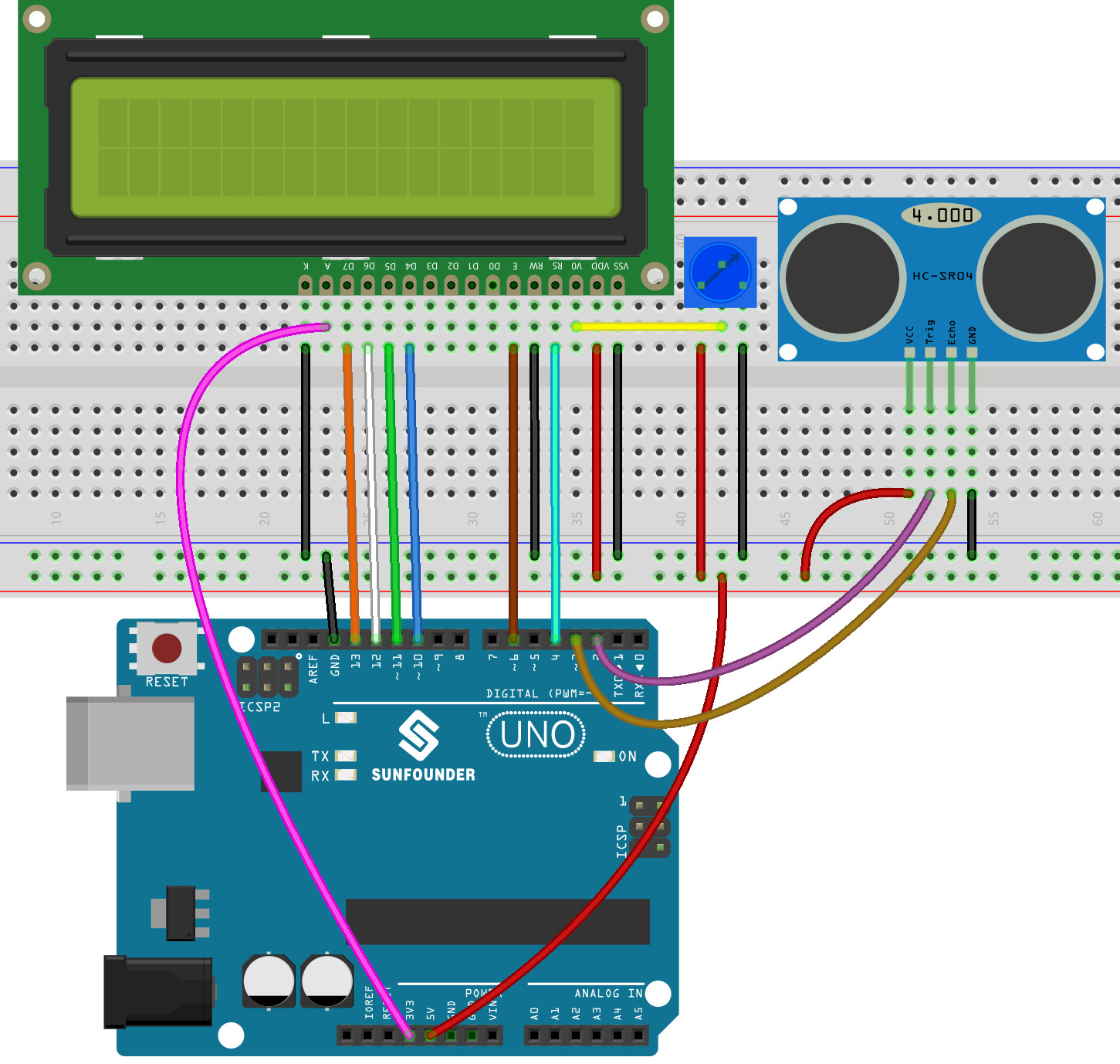
第 1 步:搭建电路。
第 2 步:打开代码文件 Lesson_13_Ultrasonic.ino。
第 3 步:选择 开发板 和 端口。
第 4 步:点击 上传 按钮来上传代码。
现在,如果你使用一张纸靠近或远离传感器。你会看到 LCD1602 上显示的值发生变化,这表示纸张与超声波传感器之间的距离。
代码¶
代码分析¶
初始化超声波和LCD1602
#include <LiquidCrystal.h>
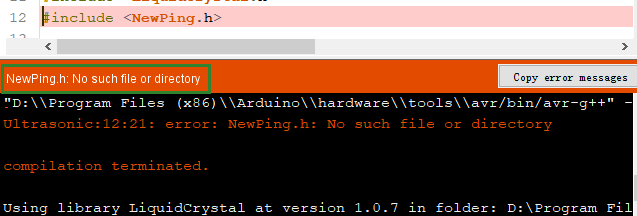
#include <NewPing.h>
LiquidCrystal lcd(4, 6, 10, 11, 12, 13);//lcd(RS,E,D4,D5,D6,D7)
#define TRIGGER_PIN 2 // trig pin on the ultrasonic sensor attach to pin2 .
#define ECHO_PIN 3 // echo pin on the ultrasonic sensor attach to pin3.
#define MAX_DISTANCE 400 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance.
创建一个 NewPing 变量 sonar。NewPing的基本格式为: NewPing(uint8_t trigger_pin, uint8_t echo_pin, int max_cm_distance) 。这里uint 表示无符号整数,8 表示 8 位。所以这里 uint8 格式的值意味着一个 unsigned-char 类型的值。
将时间转换成距离
unsigned int uS = sonar.ping(); // Send ping, get ping time in
microseconds (uS).
ping() 用来计算从脉冲发送到接收的时间。定义一个变量 Us 来存储接收的时间,单位应该是微秒(us)。
int distance = uS / US_ROUNDTRIP_CM;
uS / US_ROUNDTRIP_CM `` 是将 ``ping() 发送和接收之间的时间转换为距离的公式,单位是厘米。
在LCD1602上显示距离
lcd.setCursor(0, 0);//Place the cursor at Line 1, Column 1. From here the characters are to be displayed
lcd.print("Distance:");////Print Distance: on the LCD
lcd.setCursor(0, 1);//Set the cursor at Line 1, Column 0
lcd.print(" ");//Here is to leave some spaces after the characters so as to clear the previous characters that may still remain.
lcd.setCursor(9, 1);//Set the cursor at Line 1, Column 9.
lcd.print(distance);// print on the LCD the value of the distance converted from the time between ping sending and receiving.
lcd.setCursor(12, 1);//Set the cursor at Line 1, Column 12.
lcd.print("cm");//print the unit "cm"