Bemerkung
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [here] und treten Sie heute bei!
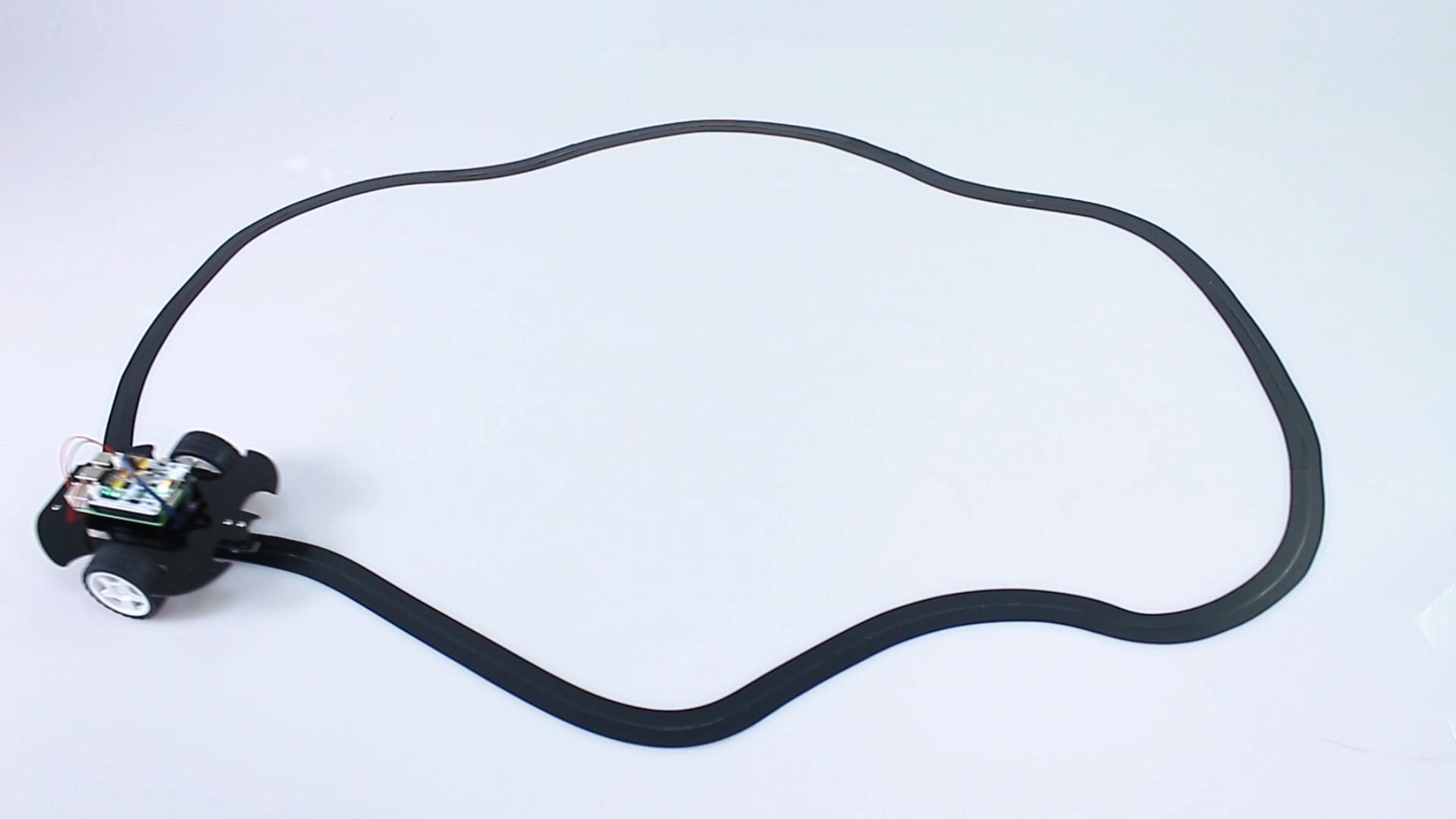
DIY-Auto
Neben der Eignung für einfache Experimente ist der Robot HAT ideal als zentraler Controller in der Robotik, wie zum Beispiel für intelligente Autos, geeignet.
In diesem Projekt haben wir ein einfaches linienfolgendes Auto gebaut.
Code
from robot_hat import Motors, Pin
import time
# Create motor object
motors = Motors()
# Initialize line tracking sensor
line_track = Pin('D0')
def main():
while True:
# print("value", line_track.value())
# time.sleep(0.01)
if line_track.value() == 1:
# If line is detected
motors[1].speed(-60) # Motor 1 forward
motors[2].speed(20) # Motor 2 backward
time.sleep(0.01)
else:
# If line is not detected
motors[1].speed(-20) # Motor 1 backward
motors[2].speed(60) # Motor 2 forward
time.sleep(0.01)
def destroy():
# Stop motors when Ctrl+C is pressed
motors.stop()
print("Motors stopped.")
if __name__ == '__main__':
try:
main()
except KeyboardInterrupt:
destroy()