Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
3.1.4 Intelligenter Ventilator
Bemerkung
Abhängig von Ihrer Kit-Version identifizieren Sie bitte, ob Sie ADC0834 oder MCP3008 haben, und fahren Sie mit dem entsprechenden Abschnitt fort.
Einführung
In diesem Projekt verwenden wir Motoren, Tasten und Thermistoren, um einen manuellen + automatischen intelligenten Ventilator zu bauen, dessen Windgeschwindigkeit einstellbar ist.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
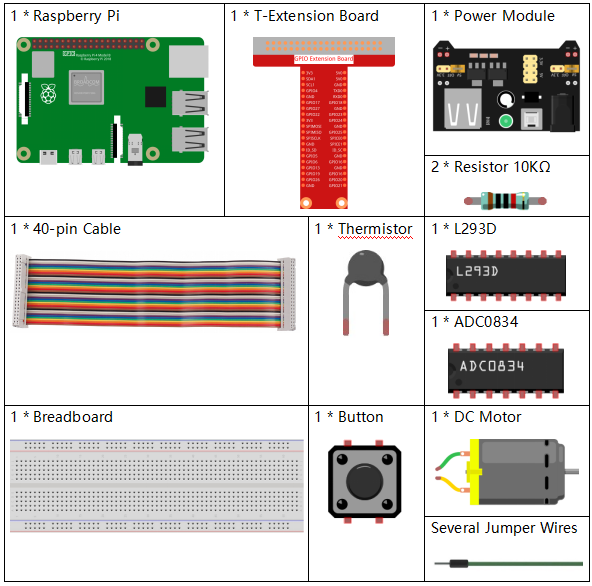
Es ist sicherlich praktisch, ein ganzes Set zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM KIT |
LINK |
|---|---|---|
Raphael Kit |
337 |
Sie können sie auch einzeln über die untenstehenden Links kaufen.
KOMPONENTENBESCHREIBUNG |
KAUF-LINK |
|---|---|
- |
|
- |
|
- |
|
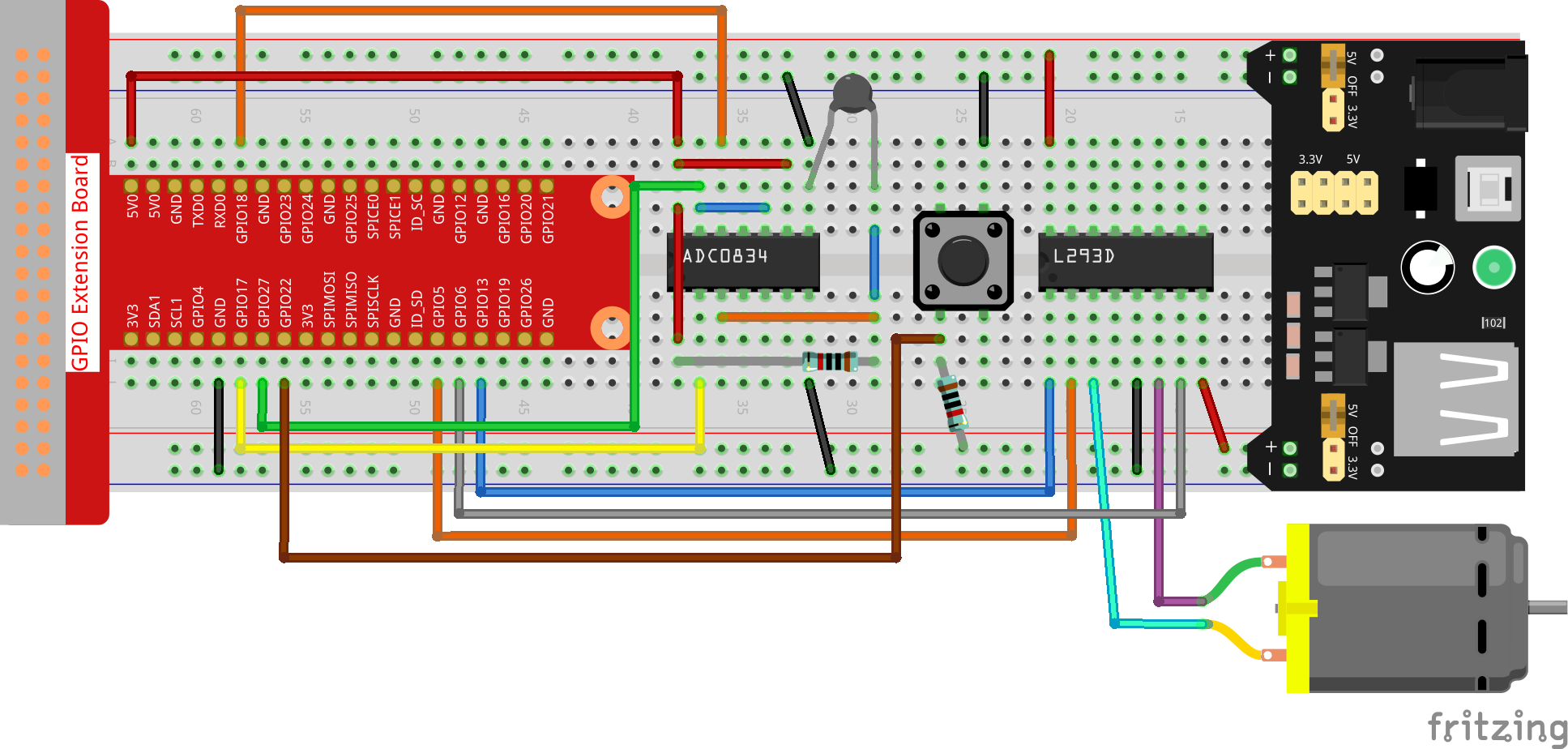
Schaltplan
T-Board Name |
physisch |
wiringPi |
BCM |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |

Experimentelle Verfahren
Schritt 1: Bauen Sie den Schaltkreis.
Bemerkung
Das Strommodul kann mit dem 9V-Batterieclip im Kit eine 9V-Batterie nutzen. Setzen Sie den Jumper des Strommoduls in die 5V-Busleisten des Breadboards.

Schritt 2: Wechseln Sie in den Ordner mit dem Code.
cd ~/raphael-kit/c/3.1.4/
Schritt 3: Kompilieren.
gcc 3.1.4_SmartFan.c -lwiringPi -lm
Schritt 4: Führen Sie die obige ausführbare Datei aus.
sudo ./a.out
Wenn der Code läuft, starten Sie den Ventilator durch Drücken der Taste. Jedes Mal, wenn Sie drücken, wird die Geschwindigkeitsstufe um 1 erhöht oder verringert. Es gibt 5 Geschwindigkeitsstufen: 0~4. Wenn Sie auf die 4te Geschwindigkeitsstufe eingestellt sind und die Taste drücken, stoppt der Ventilator mit einer 0 Windgeschwindigkeit.
Wenn die Temperatur um mehr als 2℃ steigt oder fällt, wird die Geschwindigkeit automatisch um 1 Stufe schneller oder langsamer.
Bemerkung
Wenn es nach dem Starten nicht funktioniert oder ein Fehlerhinweis erscheint: "wiringPi.h: No such file or directory", beachten Sie bitte Installieren und Überprüfen von WiringPi.
Code
#include <wiringPi.h>
#include <stdio.h>
#include <softPwm.h>
#include <math.h>
typedef unsigned char uchar;
typedef unsigned int uint;
#define ADC_CS 0
#define ADC_CLK 1
#define ADC_DIO 2
#define MotorPin1 21
#define MotorPin2 22
#define MotorEnable 23
#define BtnPin 3
uchar get_ADC_Result(uint channel)
{
uchar i;
uchar dat1=0, dat2=0;
int sel = channel > 1 & 1;
int odd = channel & 1;
digitalWrite(ADC_CLK, 1);
delayMicroseconds(2);
digitalWrite(ADC_CLK, 0);
delayMicroseconds(2);
pinMode(ADC_DIO, OUTPUT);
digitalWrite(ADC_CS, 0);
// Start bit
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
//Single End mode
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// ODD
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,odd); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
//Select
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,sel); delayMicroseconds(2);
digitalWrite(ADC_CLK,1);
delayMicroseconds(2);
digitalWrite(ADC_CLK,0);
delayMicroseconds(2);
for(i=0;i<8;i++)
{
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
pinMode(ADC_DIO, INPUT);
dat1=dat1<<1 | digitalRead(ADC_DIO);
}
for(i=0;i<8;i++)
{
dat2 = dat2 | ((uchar)(digitalRead(ADC_DIO))<<i);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
}
digitalWrite(ADC_CS,1);
pinMode(ADC_DIO, OUTPUT);
return(dat1==dat2) ? dat1 : 0;
}
int temperture(){
unsigned char analogVal;
double Vr, Rt, temp, cel, Fah;
analogVal = get_ADC_Result(0);
Vr = 5 * (double)(analogVal) / 255;
Rt = 10000 * (double)(Vr) / (5 - (double)(Vr));
temp = 1 / (((log(Rt/10000)) / 3950)+(1 / (273.15 + 25)));
cel = temp - 273.15;
Fah = cel * 1.8 +32;
int t=cel;
return t;
}
int motor(int level){
if(level==0){
digitalWrite(MotorEnable,LOW);
return 0;
}
if (level>=4){
level =4;
}
digitalWrite(MotorEnable,HIGH);
softPwmWrite(MotorPin1, level*25);
return level;
}
void setup(){
if(wiringPiSetup() == -1){ //when initialize wiring failed,print messageto screen
printf("setup wiringPi failed !");
return;
}
softPwmCreate(MotorPin1, 0, 100);
softPwmCreate(MotorPin2, 0, 100);
pinMode(MotorEnable,OUTPUT);
pinMode(BtnPin,INPUT);
pinMode(ADC_CS, OUTPUT);
pinMode(ADC_CLK, OUTPUT);
}
int main(void)
{
setup();
int currentState,lastState=0;
int level = 0;
int currentTemp,markTemp=0;
while(1){
currentState=digitalRead(BtnPin);
currentTemp=temperture();
if (currentTemp<=0){continue;}
if (currentState==1&&lastState==0){
level=(level+1)%5;
markTemp=currentTemp;
delay(500);
}
lastState=currentState;
if (level!=0){
if (currentTemp-markTemp<=-2){
level=level-1;
markTemp=currentTemp;
}
if (currentTemp-markTemp>=2){
level=level+1;
markTemp=currentTemp;
}
}
level=motor(level);
}
return 0;
}
Code-Erklärung
int temperture(){
unsigned char analogVal;
double Vr, Rt, temp, cel, Fah;
analogVal = get_ADC_Result(0);
Vr = 5 * (double)(analogVal) / 255;
Rt = 10000 * (double)(Vr) / (5 - (double)(Vr));
temp = 1 / (((log(Rt/10000)) / 3950)+(1 / (273.15 + 25)));
cel = temp - 273.15;
Fah = cel * 1.8 +32;
int t=cel;
return t;
}
Temperture() funktioniert, indem es Thermistorwerte, die von ADC0834 gelesen werden, in Temperaturwerte umwandelt. Weitere Einzelheiten finden Sie unter 2.2.2 Thermistor.
int motor(int level){
if(level==0){
digitalWrite(MotorEnable,LOW);
return 0;
}
if (level>=4){
level =4;
}
digitalWrite(MotorEnable,HIGH);
softPwmWrite(MotorPin1, level*25);
return level;
}
Diese Funktion steuert die Drehgeschwindigkeit des Motors. Der Bereich des Level: 0-4 (Stufe 0 stoppt den arbeitenden Motor). Eine Stufenanpassung steht für eine Änderung der Windgeschwindigkeit um 25%.
int main(void)
{
setup();
int currentState,lastState=0;
int level = 0;
int currentTemp,markTemp=0;
while(1){
currentState=digitalRead(BtnPin);
currentTemp=temperture();
if (currentTemp<=0){continue;}
if (currentState==1&&lastState==0){
level=(level+1)%5;
markTemp=currentTemp;
delay(500);
}
lastState=currentState;
if (level!=0){
if (currentTemp-markTemp<=-2){
level=level-1;
markTemp=currentTemp;
}
if (currentTemp-markTemp>=2){
level=level+1;
markTemp=currentTemp;
}
}
level=motor(level);
}
return 0;
}
Die Funktion main() enthält den gesamten Programmvorgang wie gezeigt:
Ständiges Auslesen des Tastenzustandes und der aktuellen Temperatur.
Jeder Tastendruck erhöht level um +1 und gleichzeitig wird die Temperatur aktualisiert. Der Level bewegt sich im Bereich 1~4.
Solange der Ventilator arbeitet (der Level ist nicht 0), wird die Temperatur überwacht. Eine Änderung um 2℃+ bewirkt das Hoch- und Heruntersetzen des Levels.
Der Motor ändert die Drehgeschwindigkeit entsprechend dem Level.