注釈
こんにちは!SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Communityへようこそ!Raspberry Pi、Arduino、ESP32に興味を持つ仲間たちと一緒に、さらに深く学びましょう。
なぜ参加するのか?
専門家によるサポート: 購入後の問題や技術的な課題を、コミュニティやチームのサポートを通じて解決できます。
学びと共有: ヒントやチュートリアルを交換してスキルを向上させましょう。
限定プレビュー: 新製品の発表を早期にチェックでき、先行情報を得ることができます。
特別割引: 最新製品に対して、限定の割引を楽しめます。
祝祭プロモーションとプレゼント: プレゼント企画や祝祭プロモーションに参加できます。
👉 私たちと一緒に探求し、創造する準備はできましたか?[ここ]をクリックして、今すぐ参加しましょう!
PiCrawlerのキャリブレーション
PiCrawlerの組み立て時に若干のずれが生じる可能性があり、またサーボ自体の制約により、サーボ角度が少し傾くことがあります。そのため、キャリブレーションを行うことができます。
もちろん、組み立てが完璧だと感じている場合やキャリブレーションが不要だと思われる場合は、この章をスキップしても構いません。
具体的な手順は以下の通りです:
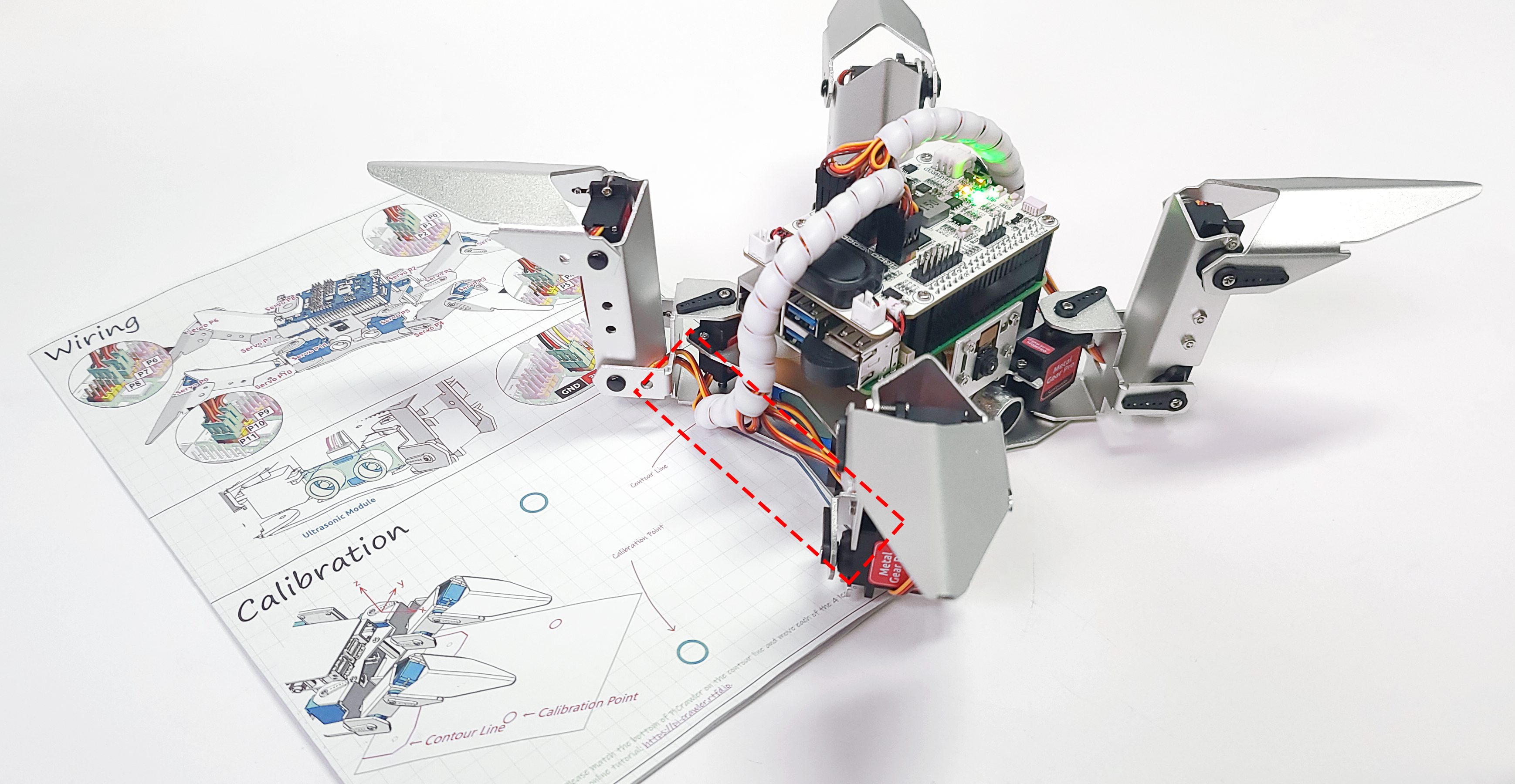
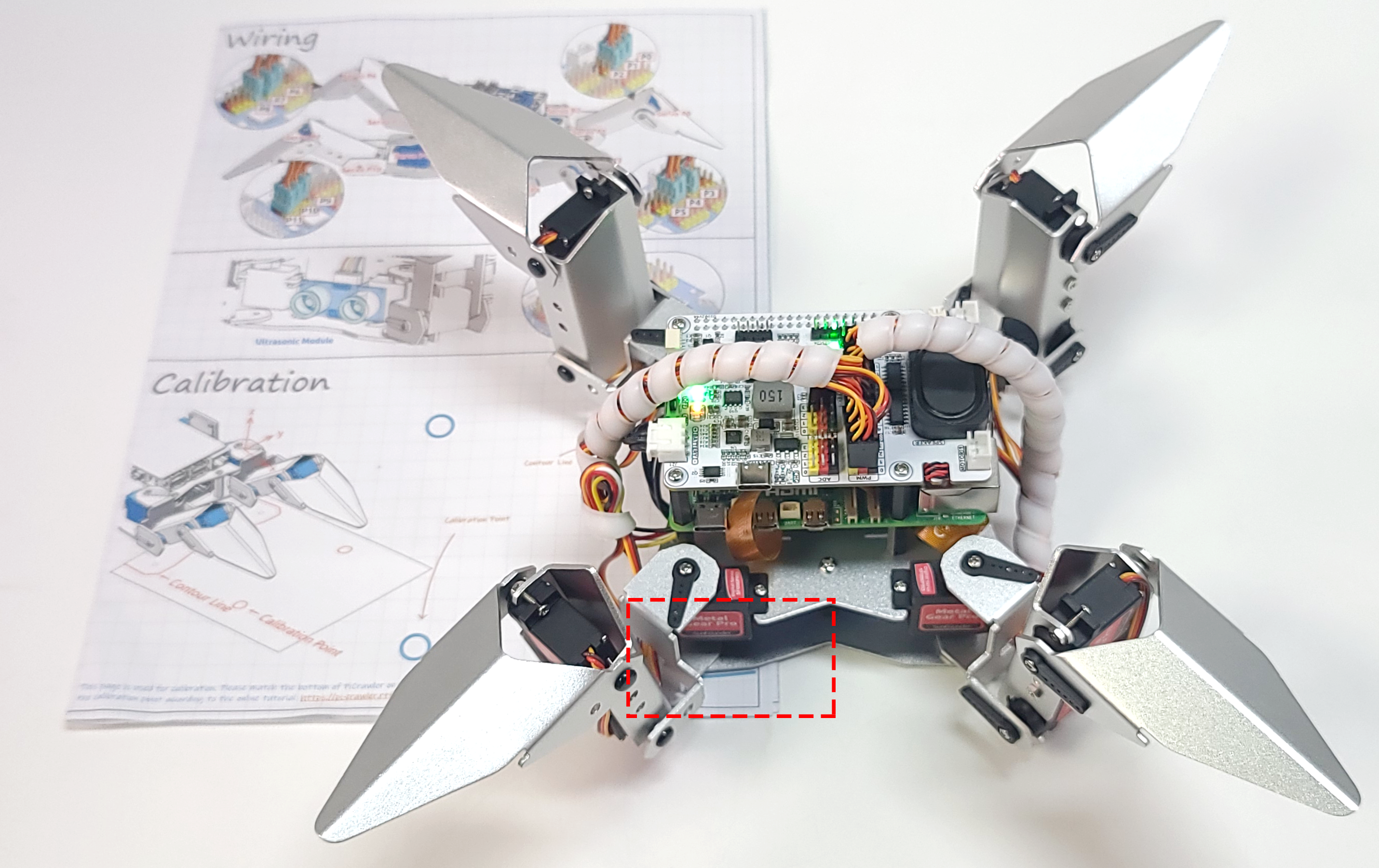
組み立てリーフレットを取り出し、最後のページを開いて平らなテーブルに置きます。その後、下記のようにPiCrawlerを配置し、キャリブレーションシートの輪郭に合わせて底面を揃えます。
calibration.pyを実行します。cd ~/picrawler/examples sudo python3 0_calibration.py
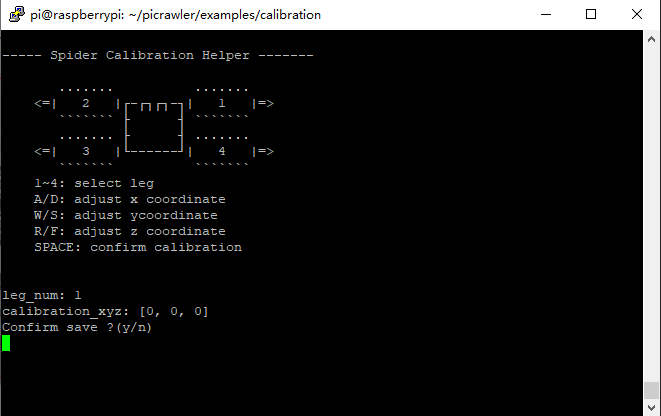
上記のコードを実行すると、ターミナルに次のインターフェースが表示されます。
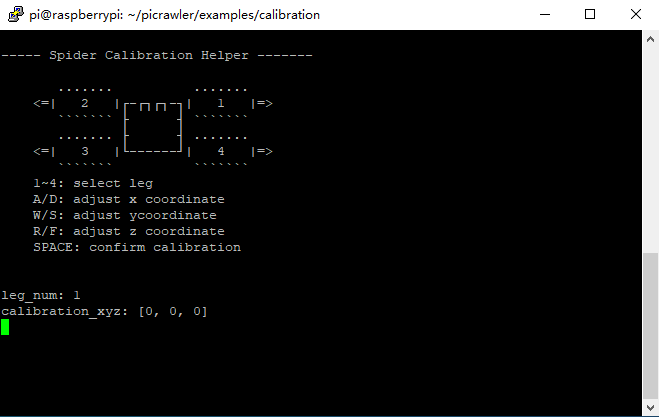
2と3のキーをそれぞれ押して、左側の2つの足を選択します。その後、w、a、s、d、r、およびfのキーを使用して、キャリブレーションポイントに移動させます。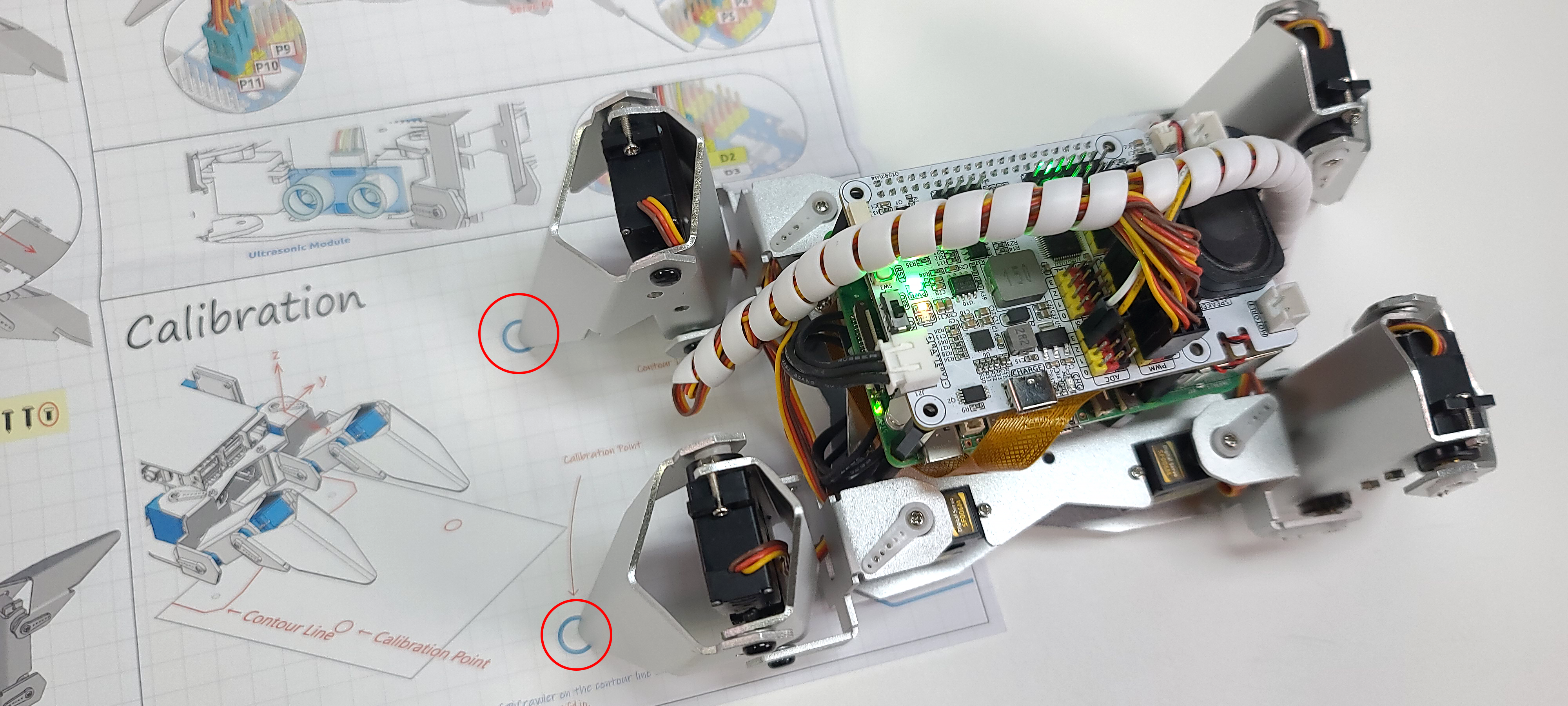
次にキャリブレーションシートを右側に移動させ、
1と4のキーを押して、右側の2つの足を選択します。その後、再度w、a、s、d、r、およびfのキーを使用して、キャリブレーションポイントに移動させます。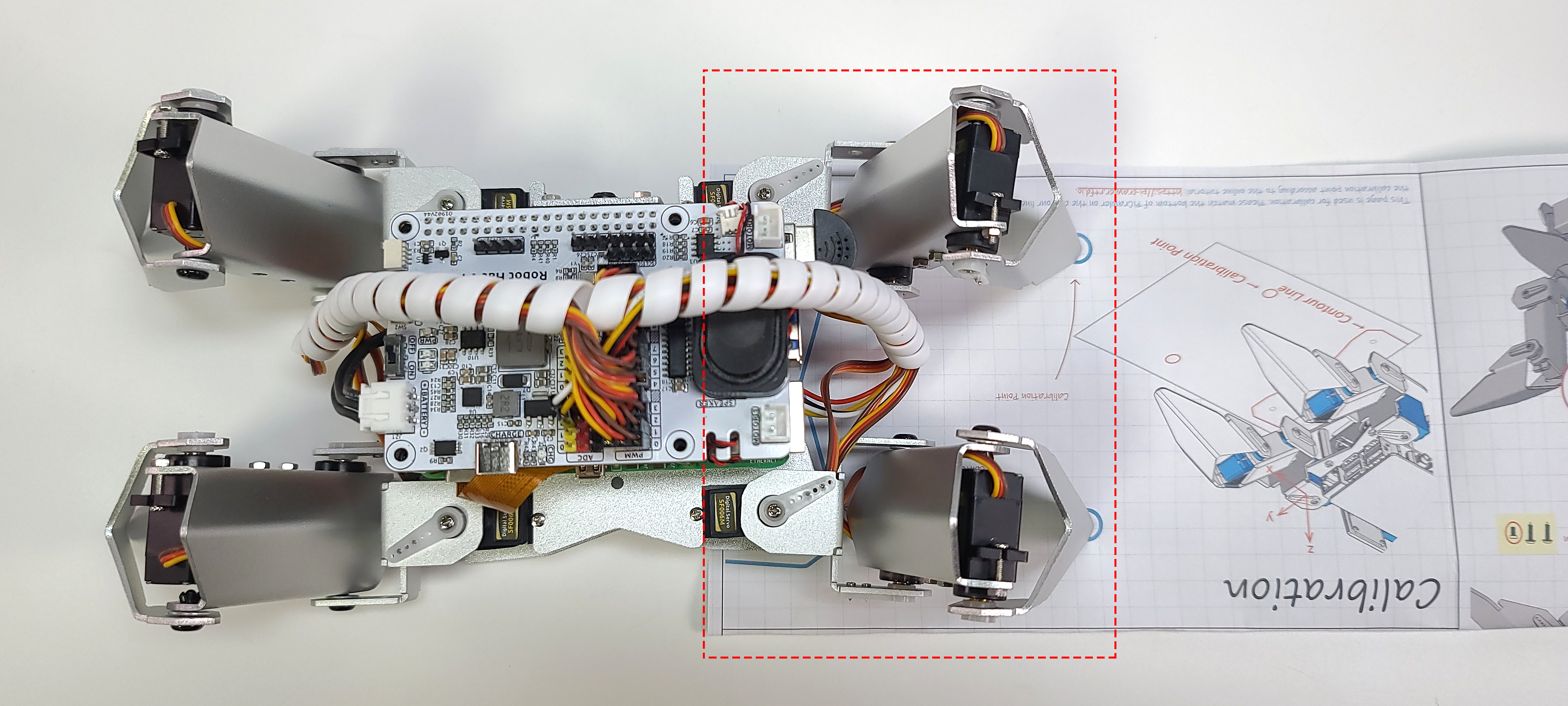
キャリブレーションが完了したら、
spaceキーを押して保存します。確認のためにYを入力するよう求められ、続いてctrl+cを押してプログラムを終了します。これでキャリブレーションが完了します。