注釈
こんにちは!SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Communityへようこそ!Raspberry Pi、Arduino、ESP32について、他の愛好者と一緒にさらに深く学んでいきましょう。
参加する理由は?
専門的なサポート: コミュニティやチームのサポートを受けて、購入後の問題や技術的な課題を解決できます。
学びと共有: ヒントやチュートリアルを交換して、スキルを向上させましょう。
限定プレビュー: 新製品の発表や先行情報にいち早くアクセスできます。
特別割引: 最新製品の特別割引をお楽しみいただけます。
イベントやプレゼント: プレゼント企画や祝祭プロモーションに参加できます。
👉 探求と創造の準備はできましたか?[ここ]をクリックして、今すぐ参加しましょう!
7. サーボの調整(重要)
注釈
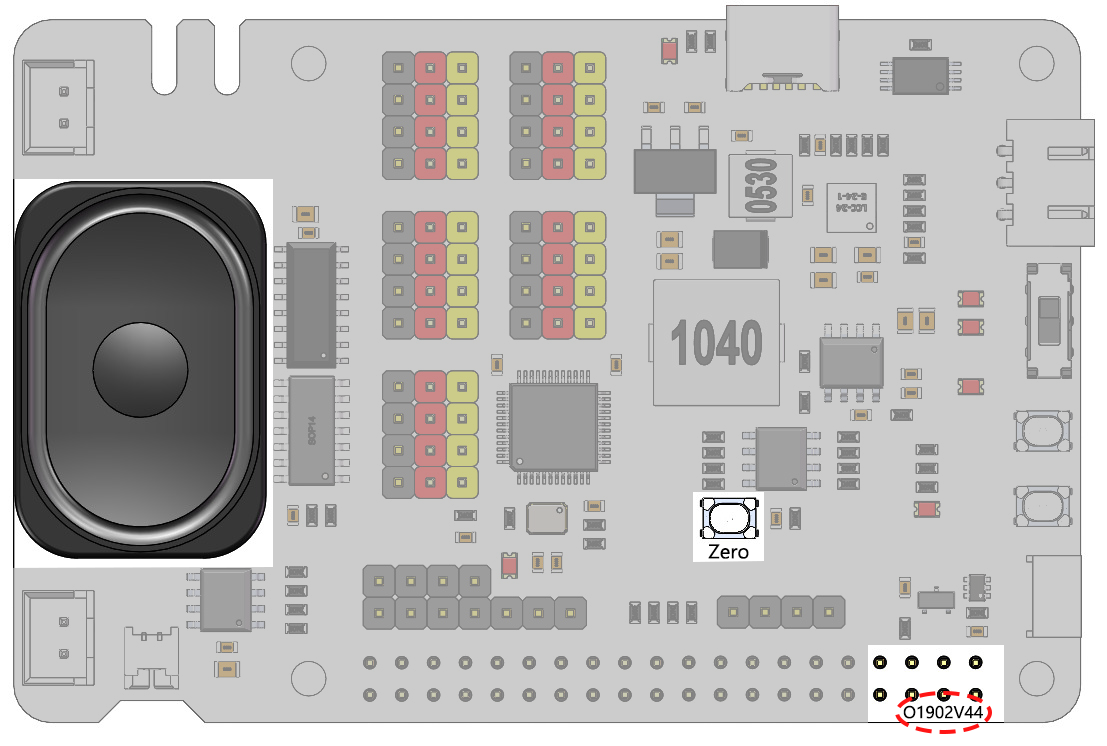
Robot HATのバージョンがV44以上(スピーカーが基板の上部にあり、オンボードの Zero ボタンがある場合)の場合、このステップをスキップして、 Zero ボタンを押すだけでサーボのゼロ設定プログラムを起動できます。
サーボの角度範囲は-90〜90ですが、工場で設定されている角度はランダムです。例えば、0°または45°などです。この角度でそのまま組み立ててしまうと、ロボットがコードを実行した後、サーボが不安定になったり、最悪の場合、サーボが動作しなくなったり、焼き付いて故障する原因となります。
そのため、すべてのサーボ角度を0°に設定してから取り付ける必要があります。これにより、どの方向に回転させても、サーボの角度が中央に保たれます。
サーボが正しく0°に設定されていることを確認するために、まずサーボアームをサーボシャフトに挿入し、その後、軽くロッカーアームを別の角度に回転させます。このサーボアームは、サーボが回転していることを明確に確認するためのものです。

次に、
examples/フォルダ内のservo_zeroing.pyを実行します。cd ~/picrawler/examples sudo python3 servo_zeroing.py
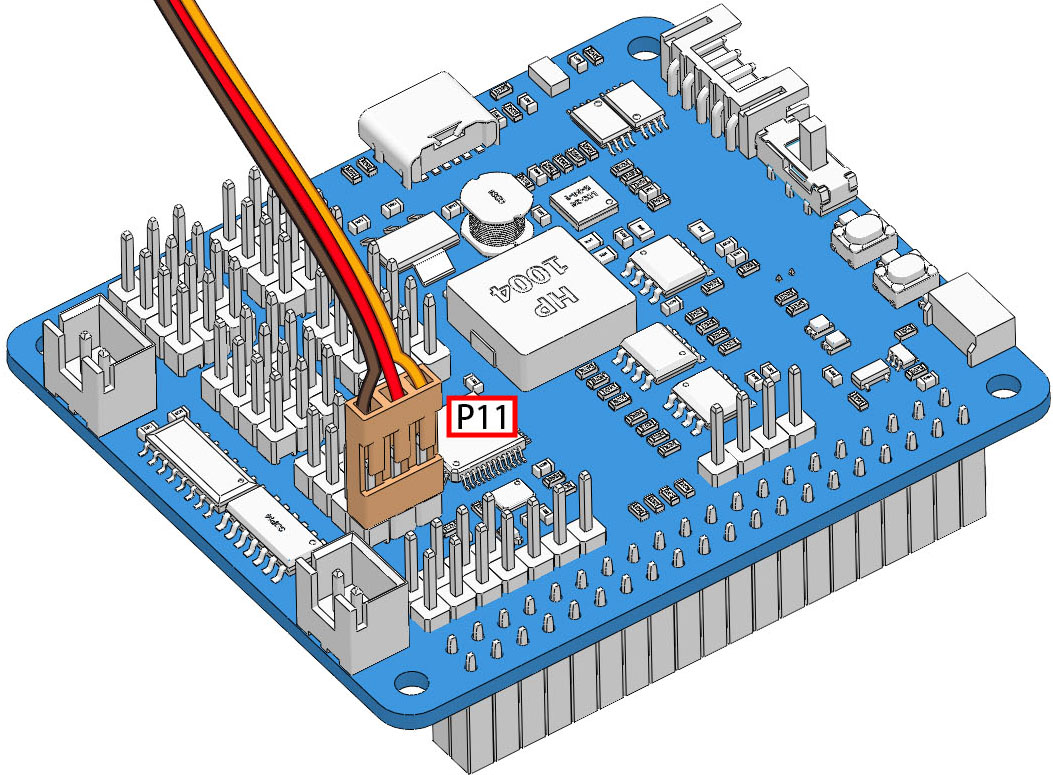
次に、サーボケーブルをP11ポートに接続します。同時に、サーボアームが位置を回転しているのが見えるはずです(これが0°の位置であり、ランダムな場所なので垂直または平行ではない場合があります)。
サーボアームを外しますが、サーボケーブルは接続されたままで、電源は切らないでください。その後、組み立て手順書に従って組み立てを続けます。
注釈
サーボのネジで固定する前にサーボケーブルを抜かないでください。固定後にケーブルを抜いても構いません。
サーボが電源オンの状態で回転しないようにしてください。もしサーボシャフトが正しい角度で挿入されていない場合は、サーボを抜いて再度挿入してください。
各サーボを組み立てる前に、サーボケーブルをPWMピンに接続し、電源を入れてその角度を0°に設定する必要があります。