Note
Bonjour, bienvenue dans la communauté des passionnés de SunFounder Raspberry Pi, Arduino et ESP32 sur Facebook ! Plongez dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi nous rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre & Partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Avant-premières exclusives : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus exclusifs.
Réductions spéciales : Profitez de réductions exclusives sur nos derniers produits.
Promotions festives et concours : Participez à des concours et promotions spéciales durant les fêtes.
👉 Prêt à explorer et créer avec nous ? Cliquez sur [ici] et rejoignez-nous dès aujourd’hui !
2.5 Lecture de la Valeur du Bouton
Ces broches ont à la fois des fonctions d’entrée et de sortie, comme l’indique leur nom GPIO (General-purpose input/output). Auparavant, nous avons utilisé la fonction de sortie ; dans ce chapitre, nous utiliserons la fonction d’entrée pour lire la valeur du bouton.
Composants Requis
Pour ce projet, nous avons besoin des composants suivants :
Il est plus pratique d’acheter un kit complet, voici le lien :
Nom |
ARTICLES DANS CE KIT |
LIEN |
|---|---|---|
Kepler Kit |
450+ |
Vous pouvez également les acheter séparément via les liens ci-dessous :
SN |
COMPOSANT |
QUANTITÉ |
LIEN |
|---|---|---|---|
1 |
1 |
||
2 |
Câble Micro USB |
1 |
|
3 |
1 |
||
4 |
Plusieurs |
||
5 |
1 (10KΩ) |
||
6 |
1 |
Schéma
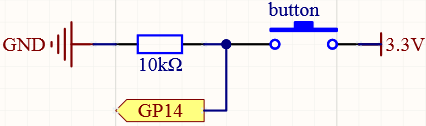
Il suffit de connecter une broche du bouton à 3.3V et l’autre broche à GP14 ; ainsi, lorsque le bouton est pressé, GP14 sera à un niveau haut. Cependant, quand le bouton n’est pas pressé, GP14 est en état flottant et peut être soit haut, soit bas. Pour obtenir un niveau bas stable lorsque le bouton n’est pas pressé, GP14 doit être relié à la masse via une résistance de pull-down de 10KΩ.
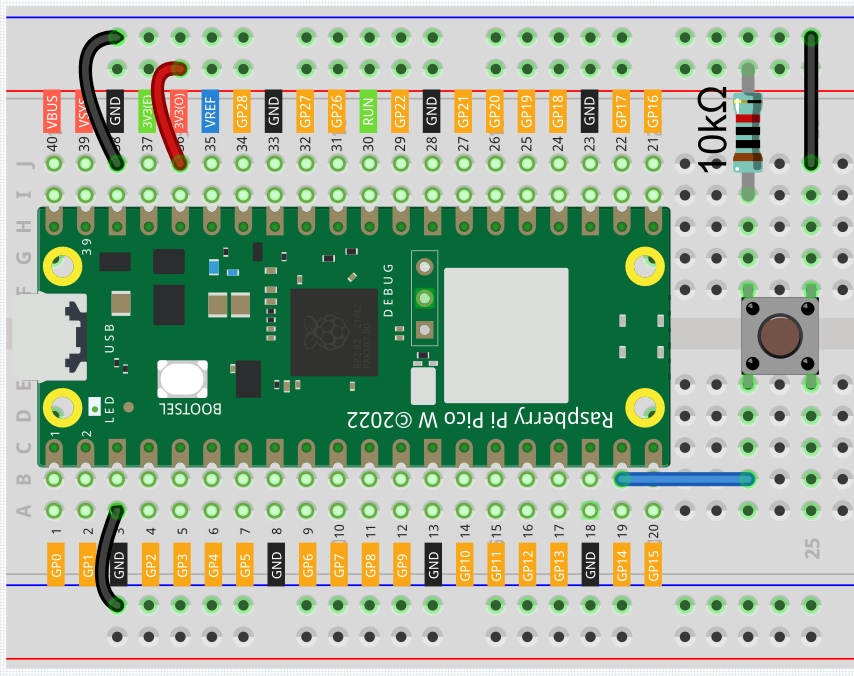
Câblage

Note
Un bouton à quatre broches a la forme d’un « H ». Les deux broches de gauche ou de droite sont connectées, ce qui signifie que lorsqu’il est placé sur la ligne centrale, il connecte deux demi-rangées ayant le même numéro de rangée. (Par exemple, dans mon circuit, E23 et F23 sont déjà connectés, tout comme E25 et F25).
Tant que le bouton n’est pas pressé, les broches gauche et droite sont indépendantes et le courant ne peut pas circuler d’un côté à l’autre.
Code
Note
Ouvrez le fichier
2.5_read_button_value.pysous le cheminkepler-kit-main/micropythonou copiez ce code dans Thonny, puis cliquez sur « Exécuter le script actuel » ou appuyez simplement sur F5 pour l’exécuter.N’oubliez pas de sélectionner l’interpréteur « MicroPython (Raspberry Pi Pico) » en bas à droite.
Pour des tutoriels détaillés, veuillez vous référer à Ouvrir et Exécuter du Code Directement.
import machine
import utime
button = machine.Pin(14, machine.Pin.IN)
while True:
if button.value() == 1:
print("You pressed the button!")
utime.sleep(1)
Dès que le code s’exécute, le Shell affiche « Vous avez appuyé sur le bouton ! »
Mode de Fonctionnement Pull-up
La prochaine partie concerne le câblage et le code lorsque vous utilisez le bouton en mode pull-up.
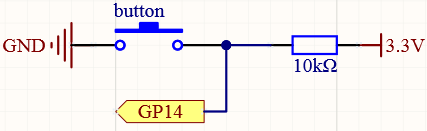
La seule différence avec le mode pull-down est que la résistance de 10KΩ est connectée à 3.3V et le bouton à la masse, de sorte que lorsque le bouton est pressé, GP14 recevra un niveau bas, ce qui est l’inverse de la valeur obtenue en mode pull-down.
Il suffit donc de modifier le code par if button.value() == 0:.
Voir également la référence ici :