Note
Bonjour, bienvenue dans la communauté SunFounder des passionnés de Raspberry Pi, Arduino & ESP32 sur Facebook ! Approfondissez vos connaissances sur le Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi nous rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre & Partager : Échangez des astuces et des tutoriels pour développer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus exclusifs.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et concours : Participez à des concours et à des promotions spéciales lors des fêtes.
👉 Prêt à explorer et créer avec nous ? Cliquez sur [ici] et rejoignez-nous dès aujourd’hui !
2.6 Inclinez-le !

Le commutateur à inclinaison est un dispositif à 2 broches avec une bille métallique à l’intérieur. Lorsque le commutateur est en position verticale, les deux broches sont connectées ; lorsqu’il est incliné, les deux broches sont déconnectées.
Composants Requis
Dans ce projet, nous aurons besoin des composants suivants.
Il est plus pratique d’acheter un kit complet, voici le lien :
Nom |
ÉLÉMENTS DANS CE KIT |
LIEN |
|---|---|---|
Kit Kepler |
450+ |
Vous pouvez également les acheter séparément via les liens ci-dessous.
SN |
COMPOSANT |
QUANTITÉ |
LIEN |
|---|---|---|---|
1 |
1 |
||
2 |
Câble Micro USB |
1 |
|
3 |
1 |
||
4 |
Plusieurs |
||
5 |
1 (10KΩ) |
||
6 |
1 |
Schéma
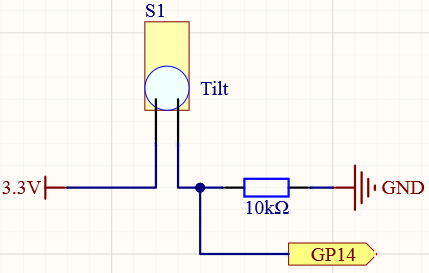
Lorsque le commutateur est en position verticale, GP14 passera à un état haut ; une fois incliné, GP14 passera à un état bas.
La résistance de 10K a pour but de maintenir GP14 dans un état bas stable lorsque le commutateur à inclinaison est incliné.
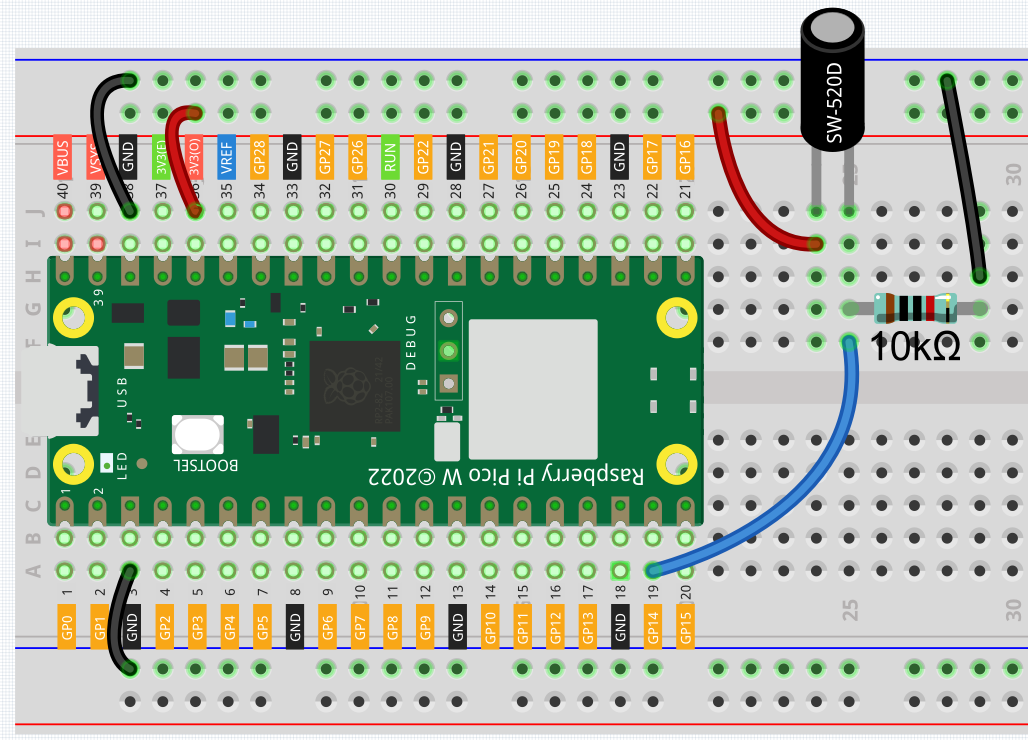
Câblage
Code
Note
Ouvrez le fichier
2.6_tilt_switch.pysous le cheminkepler-kit-main/micropythonou copiez ce code dans Thonny, puis cliquez sur « Run Current Script » ou appuyez simplement sur F5 pour l’exécuter.N’oubliez pas de sélectionner l’interpréteur « MicroPython (Raspberry Pi Pico) » en bas à droite.
Pour des tutoriels détaillés, veuillez consulter Ouvrir et Exécuter du Code Directement.
import machine
import utime
button = machine.Pin(14, machine.Pin.IN)
while True:
if button.value() == 0:
print("The switch works!")
utime.sleep(1)
Après l’exécution du programme, lorsque vous inclinez la breadboard (avec le commutateur à inclinaison), « Le commutateur fonctionne ! » s’affichera dans la console.