Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder para Raspberry Pi, Arduino y ESP32 en Facebook. Profundiza en el mundo de Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Previsualizaciones exclusivas: Obtén acceso anticipado a nuevos anuncios de productos y adelantos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones festivas y sorteos: Participa en sorteos y promociones de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
3.7 - Balanceo de un Servo
En este kit, además del LED y el zumbador pasivo, también tenemos un dispositivo controlado por señal PWM: el servo.
Un servo es un dispositivo de servomecanismo de posición (ángulo), adecuado para sistemas de control que requieren cambios constantes de ángulo y deben mantenerse en ese estado. Los servos son ampliamente usados en juguetes de control remoto avanzados, como aviones, modelos de submarinos y robots.
¡Ahora intentemos hacer que el servo oscile!
Componentes Necesarios
En este proyecto, necesitamos los siguientes componentes.
Es muy conveniente comprar un kit completo; aquí está el enlace:
Nombre |
ELEMENTOS EN ESTE KIT |
LINK DE COMPRA |
|---|---|---|
Kit Kepler |
450+ |
También puedes comprarlos por separado en los enlaces a continuación.
N° |
INTRODUCCIÓN DEL COMPONENTE |
CANTIDAD |
LINK DE COMPRA |
|---|---|---|---|
1 |
1 |
||
2 |
Cable Micro USB |
1 |
|
3 |
1 |
||
4 |
Varios |
||
5 |
1 |
Esquema
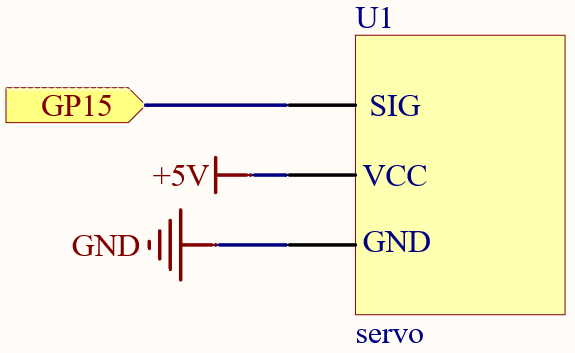
Conexión
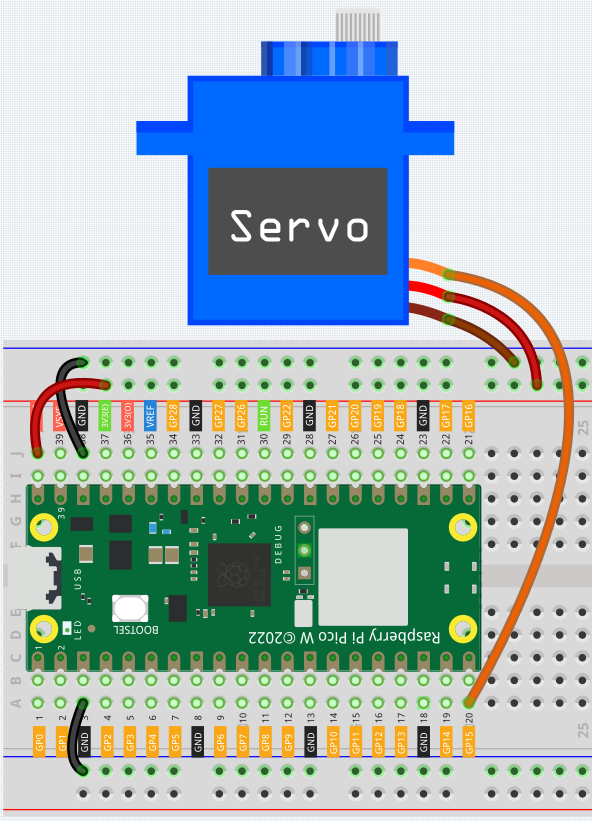
El cable naranja es la señal y está conectado a GP15.
El cable rojo es VCC y está conectado a VBUS (5V).
El cable marrón es GND y está conectado a GND.
Código
Nota
Puedes abrir el archivo
3.7_swinging_servo.inoen la rutakepler-kit-main/arduino/3.7_swinging_servo.O copia este código en el Arduino IDE.
No olvides seleccionar la placa (Raspberry Pi Pico) y el puerto correcto antes de hacer clic en el botón Subir.
Al ejecutar el programa, veremos el brazo del servo moviéndose de un lado a otro de 0° a 180°.
¿Cómo funciona?
Al llamar a la biblioteca Servo.h, puedes controlar el servo fácilmente.
#include <Servo.h>
Funciones de la Biblioteca
Servo
Crear un objeto Servo para controlar el servo.
uint8_t attach(int pin);
Convierte un pin en controlador de servo. Llama a pinMode. Devuelve 0 si falla.
void detach();
Libera un pin del control de servo.
void write(int value);
Establece el ángulo del servo en grados, de 0 a 180.
int read();
Devuelve el valor establecido con el último write().
bool attached();
Devuelve 1 si el servo está actualmente conectado.