Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
3.7 - Schwingender Servo
In diesem Set gibt es neben LED und passivem Summer auch ein Gerät, das durch ein PWM-Signal gesteuert wird: der Servo.
Ein Servo ist ein Positionsservo-Gerät, das für Steuerungssysteme geeignet ist, die ständige Winkeländerungen erfordern und aufrechterhalten können. Es wird häufig in hochwertigen ferngesteuerten Spielzeugen eingesetzt, wie Flugzeugen, U-Boot-Modellen und ferngesteuerten Robotern.
Jetzt versuchen Sie, den Servo schwingen zu lassen!
Benötigte Komponenten
Für dieses Projekt benötigen wir folgende Komponenten:
Es ist sicherlich praktisch, ein komplettes Set zu kaufen. Hier ist der Link:
Name |
ARTIKEL IN DIESEM SET |
KAUF-LINK |
|---|---|---|
Kepler Kit |
450+ |
Sie können diese auch separat über die untenstehenden Links kaufen.
SN |
KOMPONENTENBESCHREIBUNG |
ANZAHL |
KAUF-LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro-USB-Kabel |
1 |
|
3 |
1 |
||
4 |
Mehrere |
||
5 |
1 |
Schaltplan
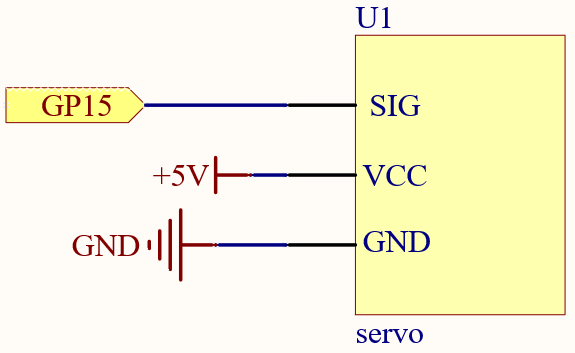
Verkabelung
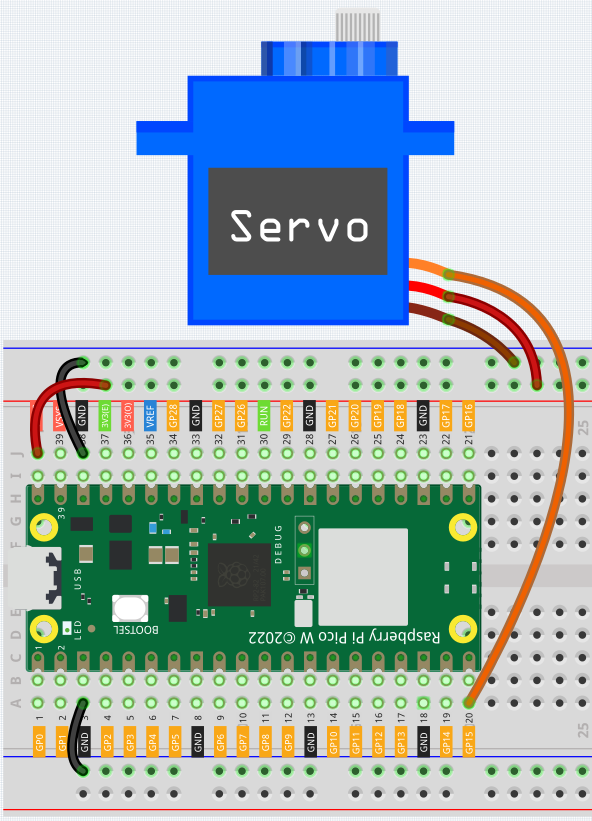
Das orangefarbene Kabel ist das Signal und wird an GP15 angeschlossen.
Das rote Kabel ist VCC und wird an VBUS(5V) angeschlossen.
Das braune Kabel ist GND und wird an GND angeschlossen.
Code
Bemerkung
Sie können die Datei
3.7_swinging_servo.inoim Pfadkepler-kit-main/arduino/3.7_swinging_servoöffnen.Oder kopieren Sie diesen Code in die Arduino IDE.
Vergessen Sie nicht, die Platine (Raspberry Pi Pico) und den richtigen Port auszuwählen, bevor Sie auf die Schaltfläche Hochladen klicken.
Wenn das Programm läuft, sehen wir, wie der Servoarm sich von 0° bis 180° hin und her bewegt.
Wie funktioniert es?
Mit Hilfe der Bibliothek Servo.h können Sie den Servo leicht steuern.
#include <Servo.h>
Bibliotheksfunktionen
Servo
Erstellen Sie ein Servo-Objekt, um einen Servo zu steuern.
uint8_t attach(int pin);
Verwandeln Sie einen Pin in einen Servo-Treiber. Ruft pinMode auf. Gibt 0 bei Fehler zurück.
void detach();
Gibt einen Pin vom Servo-Treiber frei.
void write(int value);
Setzt den Winkel des Servos in Grad, von 0 bis 180.
int read();
Gibt den mit dem letzten write()-Befehl eingestellten Wert zurück.
bool attached();
Gibt 1 zurück, wenn der Servo aktuell angeschlossen ist.