Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
2.10 - Menschliche Bewegung erfassen
Der passive Infrarotsensor (PIR-Sensor) ist ein gängiger Sensor, der infrarotes (IR) Licht messen kann, das von Objekten in seinem Sichtfeld abgestrahlt wird. Einfach ausgedrückt, erfasst er die von Körpern abgestrahlte Infrarotstrahlung und kann dadurch die Bewegung von Menschen und anderen Lebewesen erkennen. Konkret informiert er die Hauptsteuerung darüber, dass jemand den Raum betreten hat.
Erforderliche Komponenten
Für dieses Projekt werden die folgenden Komponenten benötigt.
Es ist definitiv praktisch, ein ganzes Set zu kaufen. Hier ist der Link:
Bezeichnung |
ELEMENTE IN DIESEM KIT |
KAUF-LINK |
|---|---|---|
Kepler Kit |
450+ |
Die Teile können auch einzeln über die folgenden Links gekauft werden.
SN |
KOMPONENTENBESCHREIBUNG |
ANZAHL |
KAUF-LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro-USB-Kabel |
1 |
|
3 |
1 |
||
4 |
Mehrere |
||
5 |
1 |
Schaltplan
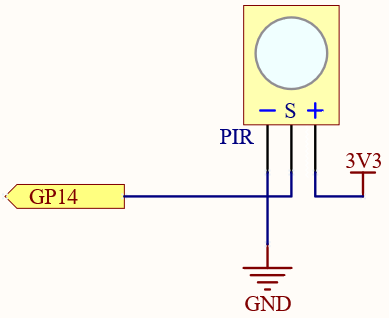
Wenn das PIR-Modul eine vorbeigehende Person erkennt, wird GP14 auf „High“ gesetzt, ansonsten bleibt es auf „Low“.
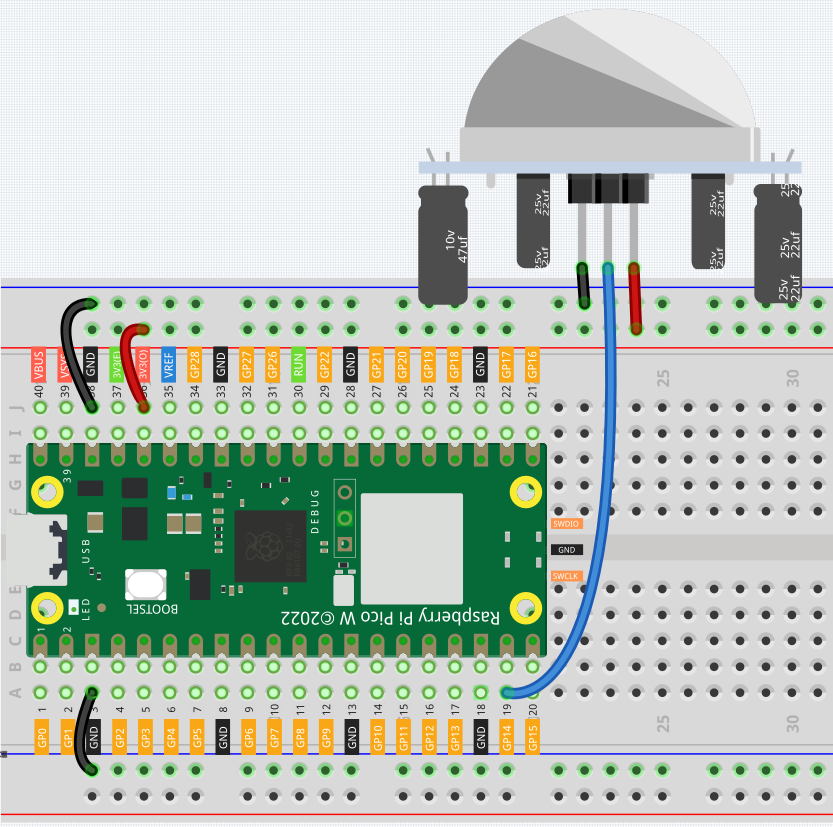
Verdrahtung
Programmcode
Bemerkung
Die Datei
2.10_detect_human_movement.inobefindet sich im Verzeichniskepler-kit-main/arduino/2.10_detect_human_movement.Alternativ können Sie den Code auch direkt in die Arduino IDE kopieren.
Denken Sie daran, vor dem Hochladen das richtige Board (Raspberry Pi Pico) und den entsprechenden Port auszuwählen.
Nach dem Start des Programms wird im seriellen Monitor „Somebody here!“ ausgegeben, wenn das PIR-Modul jemanden in der Nähe erkennt.
Mehr erfahren
Der PIR ist ein sehr empfindlicher Sensor. Um ihn an die Einsatzumgebung anzupassen, muss er justiert werden. Richten Sie die Seite mit den beiden Potentiometern zu sich aus und drehen Sie beide Potentiometer gegen den Uhrzeigersinn ganz nach links. Setzen Sie dann die Jumperkappe auf den Pin mit L und den mittleren Pin.
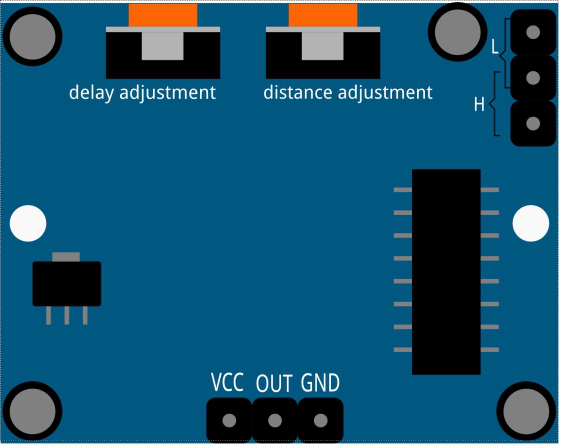
Auslösemodus
Der Jumper in der Ecke ermöglicht dem PIR, in den wiederholbaren oder nicht-wiederholbaren Auslösemodus zu wechseln.
Derzeit ist der Jumper so gesetzt, dass der PIR im nicht-wiederholbaren Modus arbeitet. In diesem Modus sendet der PIR bei erkannter Bewegung für etwa 2,8 Sekunden ein High-Signal an die Hauptsteuerung. .. In den ausgegebenen Daten sehen wir, dass die Arbeitsdauer stets rund 2800 ms beträgt.
Als nächstes ändern wir die Position der Jumperkappe und verbinden den mittleren Pin mit dem H-Pin, um den PIR in den wiederholbaren Auslösemodus zu versetzen. In diesem Modus sendet der PIR, solange sich ein Lebewesen im Erfassungsbereich bewegt, kontinuierlich ein High-Signal an die Hauptsteuerung. .. In den ausgegebenen Daten sehen wir, dass die Arbeitsdauer variabel ist.
Verzögerungseinstellung
Das linke Potentiometer dient zur Einstellung des Intervalls zwischen zwei Arbeitszyklen.
Aktuell ist es ganz nach links gedreht, sodass der PIR nach Beendigung des High-Signal-Zyklus eine Ruhephase von etwa 5 Sekunden einlegt. In dieser Zeit werden keine Infrarotstrahlen im Zielbereich erfasst. .. In den ausgegebenen Daten sehen wir, dass die Ruhezeit immer mindestens 5000 ms beträgt.
Wenn wir das Potentiometer im Uhrzeigersinn drehen, verlängert sich auch die Ruhezeit. Wenn es ganz im Uhrzeigersinn gedreht ist, beträgt die Ruhezeit bis zu 300 Sekunden.
Reichweiteneinstellung
Das mittlere Potentiometer dient zur Einstellung des Erfassungsbereichs des PIR.
Drehen Sie den Knopf des Potentiometers im Uhrzeigersinn, um den Erfassungsbereich zu erhöhen. Der maximale Erfassungsbereich beträgt etwa 0-7 Meter. Dreht man es gegen den Uhrzeigersinn, verringert sich der Erfassungsbereich. Der minimale Erfassungsbereich beträgt dann etwa 0-3 Meter.