Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
3.5 - Kleiner Ventilator
Nun nutzen wir den TA6586, um den Gleichstrommotor in beide Richtungen drehen zu lassen. Da der Gleichstrommotor einen vergleichsweise hohen Strombedarf hat, verwenden wir aus Sicherheitsgründen ein Spannungsmodul zur Stromversorgung des Motors.
Benötigte Komponenten
Für dieses Projekt benötigen wir folgende Bauteile:
Ein komplettes Set zu kaufen, ist definitiv praktisch. Hier ist der Link dazu:
Bezeichnung |
ARTIKEL IN DIESEM KIT |
KAUF-LINK |
|---|---|---|
Kepler-Kit |
450+ |
Alternativ können Sie die einzelnen Komponenten auch über die unten aufgeführten Links erwerben.
SN |
KOMPONENTENBESCHREIBUNG |
ANZAHL |
KAUF-LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro-USB-Kabel |
1 |
|
3 |
1 |
||
4 |
Mehrere |
||
5 |
1 |
||
6 |
1 |
||
7 |
1 |
||
8 |
Power Pack |
1 |
|
9 |
Batteriehalter |
1 |
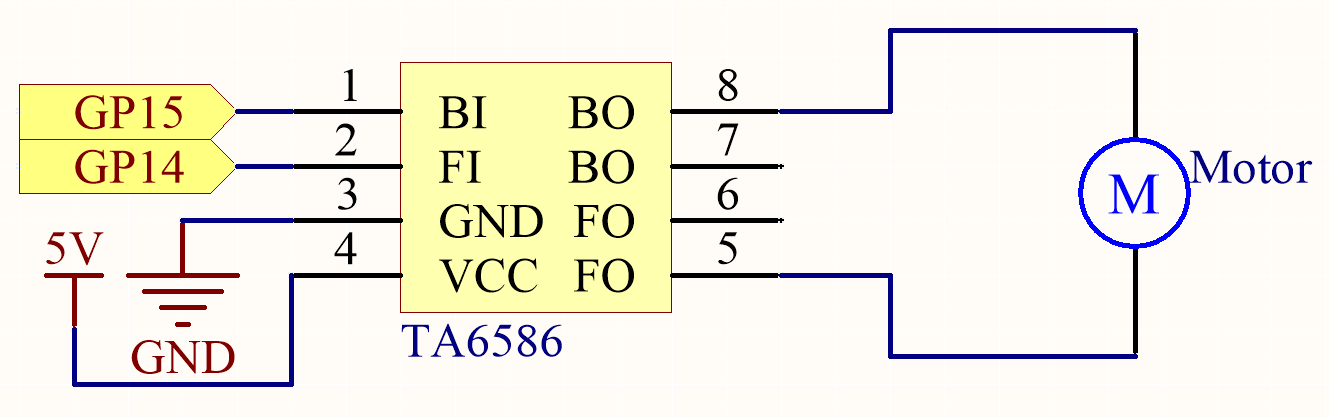
Schaltplan
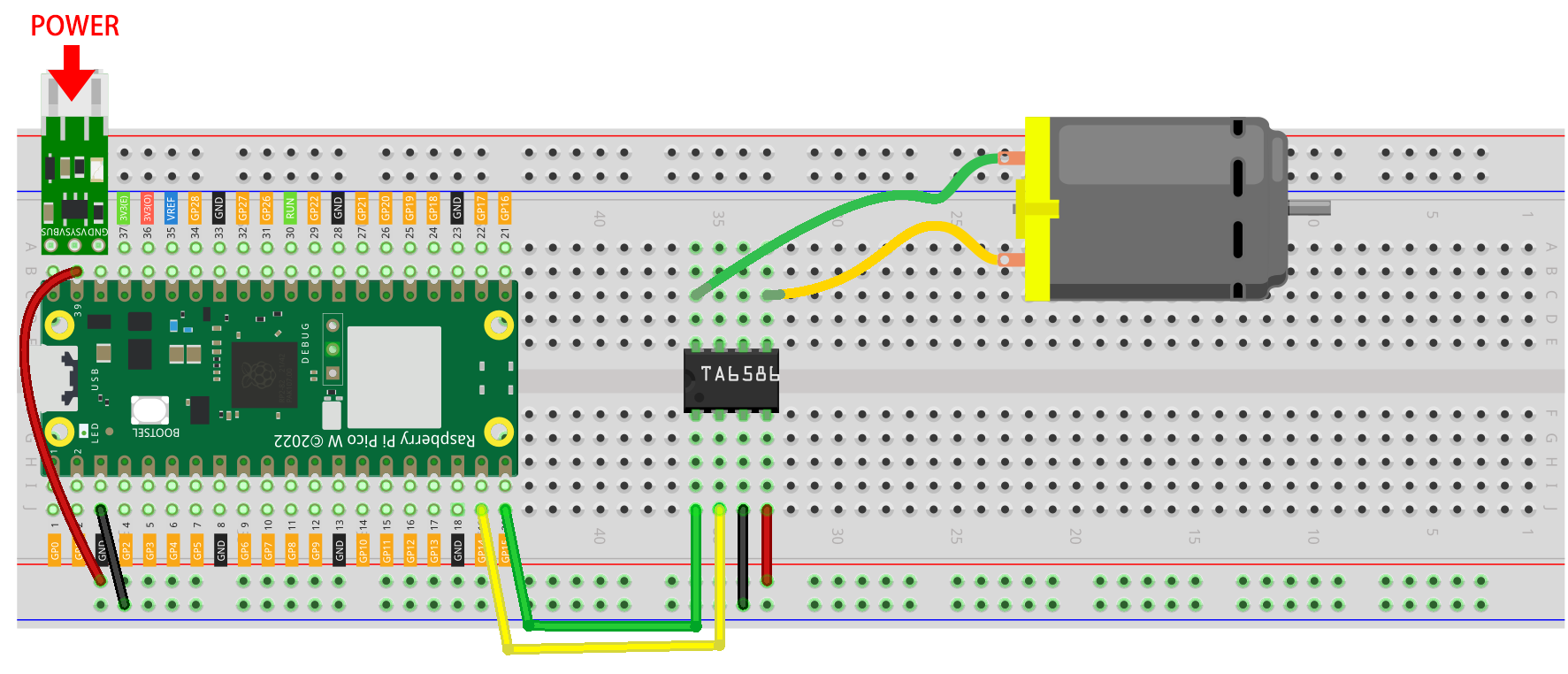
Verkabelung
Bemerkung
Da Gleichstrommotoren einen hohen Strombedarf haben, verwenden wir hier aus Sicherheitsgründen ein Li-Po-Ladegerät-Modul zur Stromversorgung des Motors.
Achten Sie darauf, dass Ihr Li-Po-Ladegerät-Modul gemäß dem Schaltplan verbunden ist. Andernfalls könnten Kurzschlüsse sowohl Ihre Batterie als auch die Schaltung beschädigen.
Code
Bemerkung
Die Datei
3.5_small_fan.inofinden Sie im Verzeichniskepler-kit-main/arduino/3.5_small_fan.Alternativ können Sie den Code auch in die Arduino-IDE kopieren.
Vergewissern Sie sich, dass Sie das richtige Board (Raspberry Pi Pico) und den korrekten Port ausgewählt haben, bevor Sie auf Hochladen klicken.
Sobald das Programm läuft, wird der Motor in einem regelmäßigen Muster hin und her drehen.
Bemerkung
Falls Sie den Code nicht erneut hochladen können, müssen Sie den RUN-Pin am Pico W mit einem Draht auf GND legen, um ihn zurückzusetzen. Danach entfernen Sie den Draht, um den Code erneut auszuführen.
Dies liegt daran, dass der Motor mit zu hohem Strom arbeitet, was dazu führen kann, dass der Pico W die Verbindung zum Computer verliert.