注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
2.1.3 チルトスイッチ
前書き
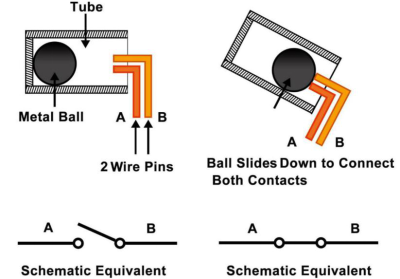
これは、内部に金属製のボールがあるボールチルトスイッチである。小さな角度の傾きを検出するために使用される。
部品

原理
チルト
原理は非常に簡単である。スイッチが特定の角度に傾けられると、内側のボールが転がり落ち、外側のピンに接続された2つの接点に触れて、回路をトリガーする。 そうしないと、ボールが接点から遠ざかり、回路が遮断される。
回路図


実験手順
ステップ1: 回路を作る。

ステップ2: ディレクトリを変更する。
cd ~/davinci-kit-for-raspberry-pi/c/2.1.3/
ステップ3: コンパイルする。
gcc 2.1.3_Tilt.c -lwiringPi
ステップ4: 実行する。
sudo ./a.out
水平に置くと、緑色のLEDが点灯する。傾けると、「Tilt!」画面にプリントされ、赤いLEDが点灯する。再び水平に置くと、緑色のLEDが再び点灯する。
コード
#include <wiringPi.h>
#include <stdio.h>
#define TiltPin 0
#define Gpin 2
#define Rpin 3
void LED(char* color)
{
pinMode(Gpin, OUTPUT);
pinMode(Rpin, OUTPUT);
if (color == "RED")
{
digitalWrite(Rpin, HIGH);
digitalWrite(Gpin, LOW);
}
else if (color == "GREEN")
{
digitalWrite(Rpin, LOW);
digitalWrite(Gpin, HIGH);
}
else
printf("LED Error");
}
int main(void)
{
if(wiringPiSetup() == -1){ //when initialize wiring failed,print message to screen
printf("setup wiringPi failed !");
return 1;
}
pinMode(TiltPin, INPUT);
LED("GREEN");
while(1){
if(0 == digitalRead(TiltPin)){
delay(10);
if(0 == digitalRead(TiltPin)){
LED("RED");
printf("Tilt!\n");
delay(100);
}
}
else if(1 == digitalRead(TiltPin)){
delay(10);
if(1 == digitalRead(TiltPin)){
LED("GREEN");
}
}
}
return 0;
}
コードの説明
void LED(char* color)
{
pinMode(Gpin, OUTPUT);
pinMode(Rpin, OUTPUT);
if (color == "RED")
{
digitalWrite(Rpin, HIGH);
digitalWrite(Gpin, LOW);
}
else if (color == "GREEN")
{
digitalWrite(Rpin, LOW);
digitalWrite(Gpin, HIGH);
}
else
printf("LED Error");
}
関数 LED() を定義して、2つのLEDをオン・オフにする。
パラメータの色が赤の場合、赤のLEDが点灯する。
同様に、パラメータの色が緑の場合、緑のLEDが点灯する。
while(1){
if(0 == digitalRead(TiltPin)){
delay(10);
if(0 == digitalRead(TiltPin)){
LED("RED");
printf("Tilt!\n");
}
}
else if(1 == digitalRead(TiltPin)){
delay(10);
if(1 == digitalRead(TiltPin)){
LED("GREEN");
}
}
}
傾斜スイッチの読み取り値が0の場合、傾斜スイッチが傾斜していることを意味し、 関数LEDにパラメーター「RED」を書き込んで赤色LEDを点灯させる。 そうしない場合、緑色のLEDが点灯する。