Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauche tiefer in Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten ein.
Warum beitreten?
Expertenunterstützung: Löse Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tausche Tipps und Tutorials aus, um deine Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalte frühzeitigen Zugang zu neuen Produktankündigungen und Vorschauen.
Sonderrabatte: Genieße exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Verlosungen: Nimm an Verlosungen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu erschaffen? Klicke auf [hier] und tritt noch heute bei!
2.1.6 Joystick (MCP3008)
Bemerkung
Je nach Kit-Version bitte prüfen, ob ADC0834 oder MCP3008 enthalten ist, und mit dem entsprechenden Abschnitt fortfahren.
Einführung
In diesem Projekt lernen wir, wie ein Joystick funktioniert. Wir bedienen den Joystick und zeigen die Ergebnisse auf dem Bildschirm an.
Benötigte Komponenten
In diesem Projekt benötigen wir die folgenden Komponenten.

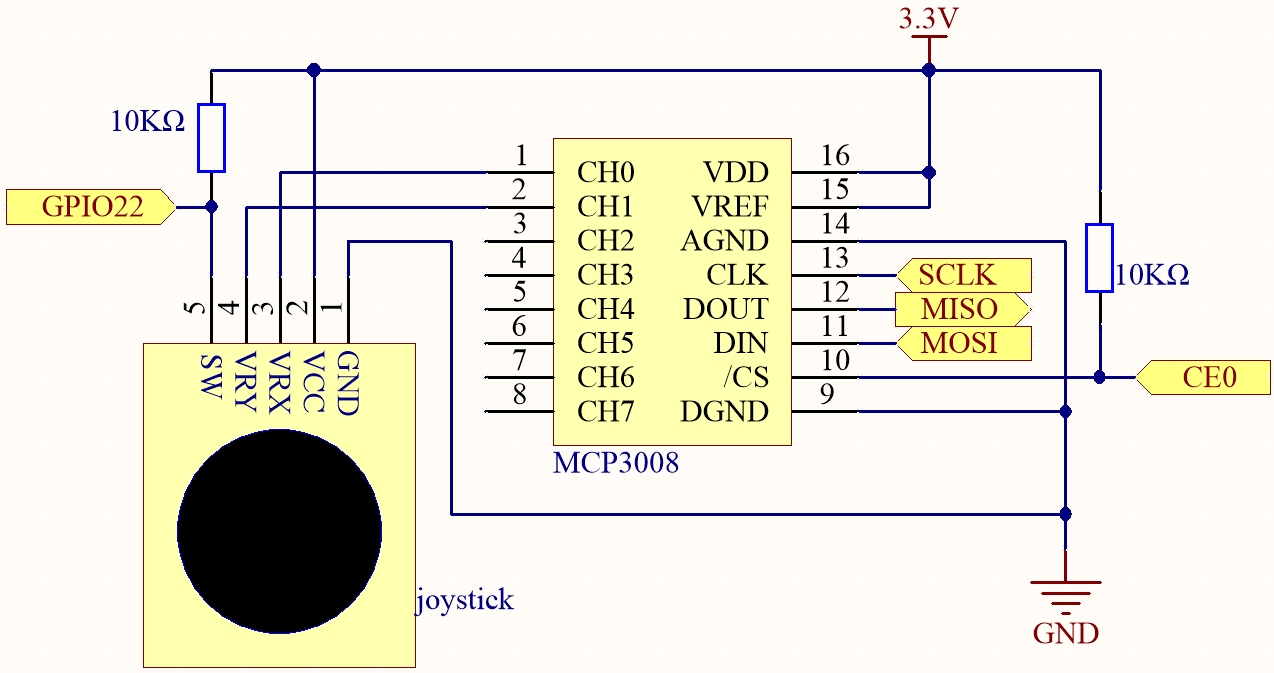
Schaltplan
Beim Auslesen der Joystick-Daten gibt es Unterschiede zwischen den Achsen: Die Daten der X- und Y-Achse sind analog und müssen mit dem MCP3008 in digitale Werte umgewandelt werden. Die Daten der Z-Achse sind digital, daher kannst du diese direkt über den GPIO auslesen – oder ebenfalls über den ADC.
T-Board-Name |
Physical |
WiringPi |
BCM |
|---|---|---|---|
SPICE0 |
pin24 |
10 |
8 |
SPIMOSI |
pin19 |
12 |
10 |
SPIMISO |
pin21 |
13 |
9 |
SPISCLK |
pin23 |
14 |
11 |
GPIO22 |
pin15 |
3 |
22 |
Experimentelle Schritte
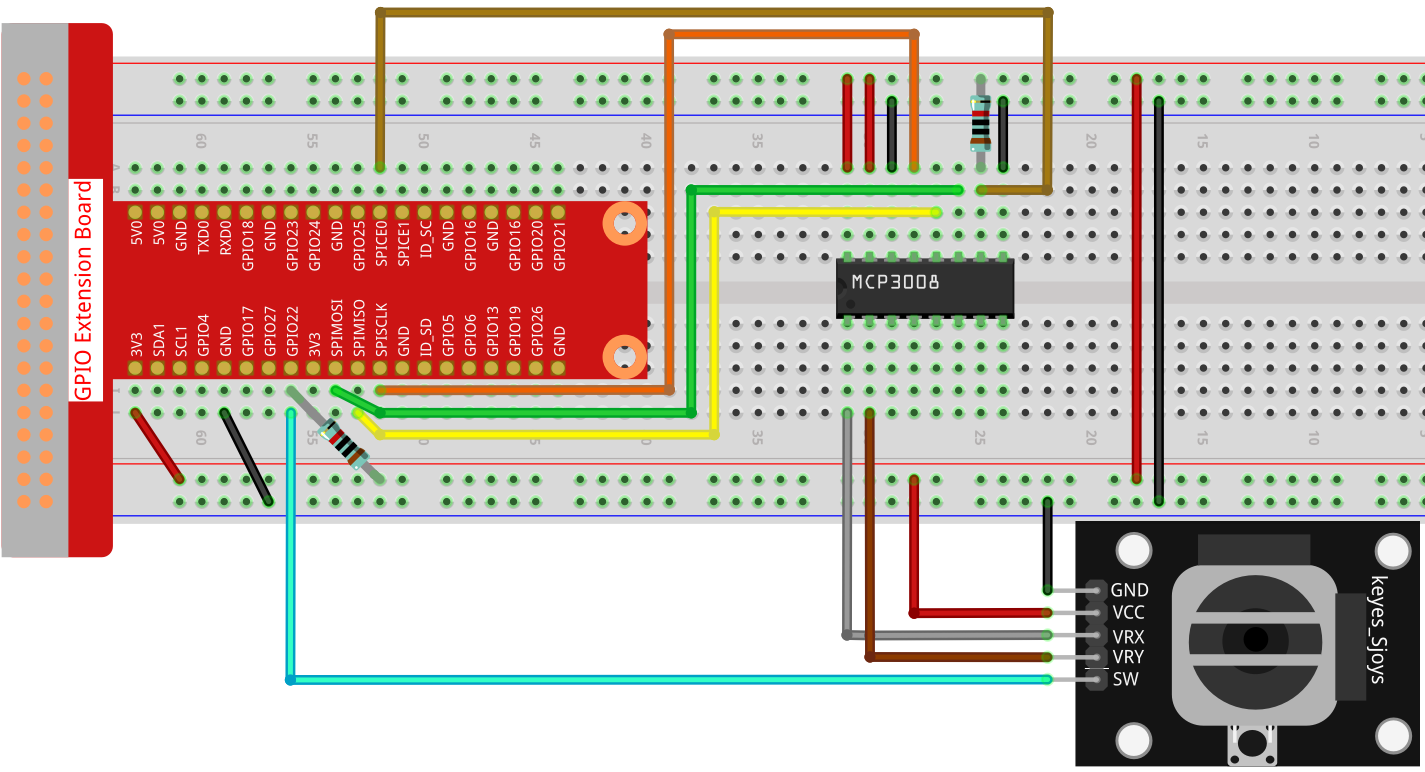
Schritt 1: Baue die Schaltung auf.
Schritt 2: Richte die SPI-Schnittstelle ein und installiere die spidev-Bibliothek (siehe SPI-Konfiguration für detaillierte Anweisungen). Falls diese Schritte bereits erledigt sind, kannst du sie überspringen.
Schritt 3: Wechsle in den Ordner mit dem Code.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Schritt 4: Führe den Code aus.
sudo python3 2.1.6-2_Joystick_zero.py
Nach dem Start des Codes bewege den Joystick – die entsprechenden Werte für X, Y und Btn werden auf dem Bildschirm angezeigt.
Warnung
Falls die Fehlermeldung RuntimeError: Cannot determine SOC peripheral base address erscheint, siehe Wenn gpiozero nicht funktioniert..
Code
Bemerkung
Du kannst den folgenden Code Ändern/Zurücksetzen/Kopieren/Ausführen/Stoppen.
Vorher musst du jedoch in das Quellcode-Verzeichnis (z. B. davinci-kit-for-raspberry-pi/python-pi5) wechseln.
Nach einer Änderung kannst du den Code direkt ausführen, um das Ergebnis zu sehen.
#!/usr/bin/env python3
from gpiozero import Button
import spidev
import time
# Button initialisieren, verbunden mit GPIO-Pin 22 (Joystick SW-Pin)
BtnPin = Button(22)
# SPI-Kommunikation mit MCP3008 initialisieren
spi = spidev.SpiDev()
spi.open(0, 0) # SPI-Bus 0, Gerät CE0 öffnen
spi.max_speed_hz = 1000000 # SPI-Geschwindigkeit auf 1 MHz setzen
def read_adc(channel):
"""
Liest den analogen Wert vom angegebenen MCP3008-Kanal (0–7)
:param channel: ADC-Kanalnummer (0–7)
:return: 10-Bit-Integerwert (0–1023)
"""
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
try:
# Hauptschleife zum Auslesen und Anzeigen der Joystick-Werte und des Button-Zustands
while True:
# X- und Y-Werte aus den MCP3008-Kanälen 0 und 1 lesen
x_val = read_adc(0) # Joystick VRX an CH0
y_val = read_adc(1) # Joystick VRY an CH1
# Zustand des Joystick-Buttons (SW) lesen
Btn_val = BtnPin.value # 0 = gedrückt, 1 = losgelassen
# Werte ausgeben
print('X: %d Y: %d Btn: %d' % (x_val, y_val, Btn_val))
# 0,2 Sekunden warten bis zur nächsten Messung
time.sleep(0.2)
# Strg+C wird sauber abgefangen
except KeyboardInterrupt:
spi.close()
Code-Erklärung
Dieser Abschnitt importiert die benötigten Bibliotheken:
gpiozero.Buttonzum Auslesen des digitalen Zustands des Joystick-Buttons (SW-Pin).spidevfür die SPI-Kommunikation mit dem MCP3008-ADC-Chip.timefür Zeitverzögerungen zwischen den Messungen.
#!/usr/bin/env python3 from gpiozero import Button import spidev import time
Initialisiert den Button an GPIO22 (Joystick SW-Pin) und richtet die SPI-Schnittstelle auf Bus 0, Chip Select 0 (CE0) ein. Die SPI-Geschwindigkeit wird auf 1 MHz gesetzt.
# Button initialisieren, verbunden mit GPIO-Pin 22 (Joystick SW-Pin) BtnPin = Button(22) # SPI-Kommunikation mit MCP3008 initialisieren spi = spidev.SpiDev() spi.open(0, 0) # SPI-Bus 0, Gerät CE0 öffnen spi.max_speed_hz = 1000000 # SPI-Geschwindigkeit auf 1 MHz setzen
Definiert die Funktion
read_adc(channel), um den analogen Wert eines bestimmten MCP3008-Kanals (0–7) auszulesen. Es werden drei Bytes per SPI-Protokoll gesendet und ein 10-Bit-Wert (0–1023) zurückgegeben.def read_adc(channel): """ Liest den analogen Wert vom angegebenen MCP3008-Kanal (0–7) :param channel: ADC-Kanalnummer (0–7) :return: 10-Bit-Integerwert (0–1023) """ if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
In der Hauptschleife werden die analogen Werte von VRX (CH0) und VRY (CH1) sowie der Zustand des Joystick-Buttons ausgelesen. Die Werte werden alle 0,2 Sekunden in der Konsole ausgegeben. Bei Strg+C wird die SPI-Schnittstelle sauber geschlossen.
try: while True: x_val = read_adc(0) y_val = read_adc(1) Btn_val = BtnPin.value print('X: %d Y: %d Btn: %d' % (x_val, y_val, Btn_val)) time.sleep(0.2) except KeyboardInterrupt: spi.close()