Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauchen Sie mit anderen Enthusiasten tiefer in Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Expertenunterstützung: Lösen Sie Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Tutorials aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und Sneak Peeks.
Sonderrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu gestalten? Klicken Sie auf [here] und treten Sie noch heute bei!
11. Objektverfolgung mit Pan-Tilt-Kamera
1. Überblick
In diesem Kapitel erweitern wir die MediaPipe-Objekterkennung, um ein einfaches Objektverfolgungssystem mit einer Pan-Tilt-Servoplattform zu erstellen.
Das System erkennt ein bestimmtes Zielobjekt (zum Beispiel eine „banana“) und passt automatisch zwei Servomotoren an, um das Objekt im Kamerabild zentriert zu halten.
Dieses Projekt kombiniert:
Echtzeit-Objekterkennung
Servomotorsteuerung
Proportionale Tracking-Logik
Visuelle Feedback-Overlays
Es zeigt, wie Computer Vision direkt physische Hardware in Echtzeit steuern kann.
2. Funktionsweise
Das Tracking-System arbeitet nach folgenden Schritten:
Initialisieren der Pan- und Tilt-Servos in der Mittelposition.
Konfigurieren der Raspberry-Pi-Kamera für Videostreaming.
Laden des EfficientDet-Lite0-Modells für die Objekterkennung.
Erkennen von Objekten in jedem Frame mit MediaPipe Tasks.
Identifizieren des Zielobjekts (z. B. „banana“).
Berechnen der Objektverschiebung relativ zur Bildmitte.
Anpassen der Servo-Winkel mit proportionaler Regelung.
Anzeigen von Tracking-Hilfslinien und Statusinformationen auf dem Bildschirm.
Dieses Beispiel zeigt, wie visuelles Feedback zur dynamischen Steuerung von Hardwarebewegungen genutzt werden kann.
3. Code ausführen
Wichtig
Stellen Sie vor dem Start sicher, dass:
das Pan-Tilt-Modul montiert ist
Sie Zugriff auf den Raspberry-Pi-Desktop haben
das Codepaket installiert ist
das Fusion HAT+ installiert und konfiguriert ist
OpenCV installiert ist
Detaillierte Anweisungen finden Sie unter 0. OpenCV einrichten.
Öffnen Sie das Terminal und geben Sie den folgenden Befehl ein:
sudo python3 ~/ai-lab-kit/mediapipe/mp_track_object.py
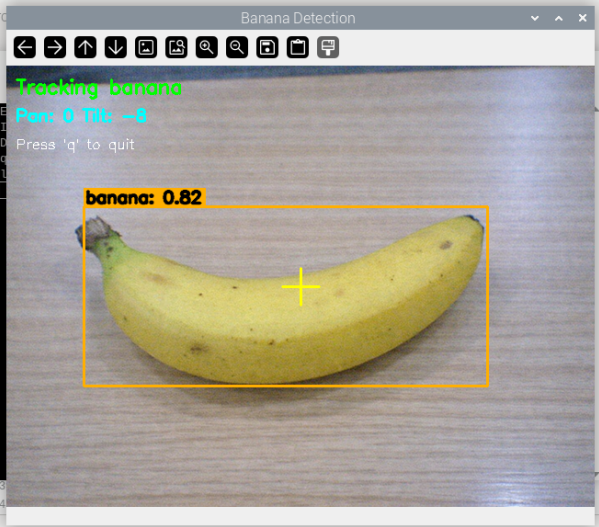
Nach dem Start des Programms öffnet sich das Kamerafenster und beginnt mit der Echtzeit-Objekterkennung.
Das System sucht nach dem angegebenen Zielobjekt (Standard:
banana). Ein gelbes Fadenkreuz wird in der Bildschirmmitte als Referenzpunkt angezeigt.Wenn das Zielobjekt im Bild erscheint:
MediaPipe erkennt das Objekt mit dem EfficientDet-Lite0-Modell.
Das Zentrum der erkannten Bounding-Box wird berechnet.
Befindet sich das Objekt außerhalb der zentralen Deadzone, bewegen sich die Pan- und Tilt-Servos schrittweise.
Die Kamera dreht sich physisch, um das Objekt nahe der Bildmitte zu halten.
Eine grüne Tracking-Box wird um das Objekt gezeichnet.
Auf dem Bildschirm werden folgende Informationen angezeigt:
Tracking banana(Status)Aktuelle Servo-Winkel (Pan / Tilt)
Wenn das Objekt nicht erkannt wird:
Die Servos bewegen sich nicht weiter.
Der Statustext wechselt zu
No banana found(rot angezeigt).
Die Tracking-Logik verwendet eine einfache 4-Richtungs-Deadzone-Steuerung: Die Servos bewegen sich nur, wenn sich das Objekt ausreichend weit von der Mitte entfernt befindet, wodurch Zittern vermieden wird.
Drücken Sie
q, um das Programm zu beenden.Beim Beenden:
Beide Servos kehren in die Mittelposition zurück.
Die Kamera stoppt.
Das Anzeigefenster wird geschlossen.
Eine Meldung wird ausgegeben:
Tracking stopped. Servos centered.
4. Vollständiger Code
#!/usr/bin/env python3
import cv2
import time
from fusion_hat.servo import Servo
from picamera2 import Picamera2
from pathlib import Path
# MediaPipe imports
import mediapipe as mp
from mediapipe.tasks import python
from mediapipe.tasks.python import vision
# -------------------- Configuration --------------------
TARGET = "banana" # Object to track
W, H = 640, 480 # Camera resolution
CX, CY = W // 2, H // 2 # Center coordinates
SCORE_THRESHOLD = 0.3 # Detection confidence threshold
DEADZONE = 50 # Pixels from center before moving
print(f"Tracking: {TARGET}")
# -------------------- Servo Initialization --------------------
pan = Servo(2) # Channel 2 for pan (horizontal)
tilt = Servo(3) # Channel 3 for tilt (vertical)
pan.angle(0) # Center position
tilt.angle(0) # Center position
time.sleep(1) # Allow servos to reach position
# -------------------- Camera Initialization --------------------
cam = Picamera2()
cam.configure(cam.create_preview_configuration(
main={"size": (W, H), "format": "XRGB8888"}
))
cam.start()
time.sleep(2) # Allow camera to stabilize
# -------------------- MediaPipe Detector Setup --------------------
model_path = str(Path(__file__).parent / "efficientdet_lite0.tflite")
options = vision.ObjectDetectorOptions(
base_options=python.BaseOptions(model_asset_path=model_path),
score_threshold=SCORE_THRESHOLD,
running_mode=vision.RunningMode.VIDEO
)
detector = vision.ObjectDetector.create_from_options(options)
print("Ready. Press 'q' to quit")
# -------------------- Tracking Logic --------------------
def simple_track(x, y):
"""Basic 4-direction tracking with deadzone"""
if x is None:
return 0, 0
pan_move = 0
tilt_move = 0
# Left/right movement decision
if x < CX - DEADZONE:
pan_move = 1 # Move right
elif x > CX + DEADZONE:
pan_move = -1 # Move left
# Up/down movement decision
if y < CY - DEADZONE:
tilt_move = -1 # Move down
elif y > CY + DEADZONE:
tilt_move = 1 # Move up
return pan_move, tilt_move
# -------------------- Main Tracking Loop --------------------
pan_pos = 0 # Current pan angle (-90° to +90°)
tilt_pos = 0 # Current tilt angle (-45° to +45°)
try:
while True:
# Capture frame from camera
frame = cam.capture_array()
frame = cv2.cvtColor(frame, cv2.COLOR_BGRA2BGR)
# Convert to RGB for MediaPipe
rgb = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=rgb)
# Detect objects in frame
detections = detector.detect_for_video(mp_image, int(time.time() * 1000))
# Search for target object
obj_x = obj_y = None
for detection in detections.detections:
for category in detection.categories:
# Case-insensitive search for target
if TARGET.lower() in str(category.category_name).lower():
bbox = detection.bounding_box
# Calculate object center
obj_x = bbox.origin_x + bbox.width // 2
obj_y = bbox.origin_y + bbox.height // 2
break
# Process tracking if object found
if obj_x is not None:
pan_move, tilt_move = simple_track(obj_x, obj_y)
pan_pos += pan_move
tilt_pos += tilt_move
# Limit servo angles to safe ranges
pan_pos = max(-90, min(90, pan_pos))
tilt_pos = max(-45, min(45, tilt_pos))
# Send commands to servos
pan.angle(pan_pos)
tilt.angle(tilt_pos)
# Draw tracking box around object
cv2.rectangle(frame,
(obj_x - 30, obj_y - 30),
(obj_x + 30, obj_y + 30),
(0, 255, 0), 2)
status = f"Tracking {TARGET}"
color = (0, 255, 0) # Green for tracking
else:
status = f"No {TARGET} found"
color = (0, 0, 255) # Red for not found
# Draw center crosshair for reference
cv2.line(frame, (CX - 20, CY), (CX + 20, CY), (0, 255, 255), 2)
cv2.line(frame, (CX, CY - 20), (CX, CY + 20), (0, 255, 255), 2)
# Display status information
cv2.putText(frame, status, (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 0.7, color, 2)
cv2.putText(frame, f"Pan: {pan_pos:.0f} Tilt: {tilt_pos:.0f}",
(10, 60), cv2.FONT_HERSHEY_SIMPLEX, 0.6, (255, 255, 0), 2)
cv2.putText(frame, "Press 'q' to quit", (10, 90),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255), 1)
# Show video window
cv2.imshow(f"Track: {TARGET}", frame)
# Exit on 'q' key press
if cv2.waitKey(1) & 0xFF == ord('q'):
break
finally:
# -------------------- Cleanup --------------------
pan.angle(0) # Return to center
tilt.angle(0) # Return to center
time.sleep(0.5) # Allow movement
cam.stop() # Stop camera
cv2.destroyAllWindows() # Close display
print("Tracking stopped. Servos centered.")
5. Code-Erklärung
Konfigurationsabschnitt
TARGET = "banana"
W, H = 640, 480
CX, CY = W // 2, H // 2
SCORE_THRESHOLD = 0.3
DEADZONE = 50
TARGET: Objektkategorie, die verfolgt werden soll (muss in den COCO-Datensatzklassen enthalten sein);W, H: Kameraauflösung – ausgewogen zwischen Geschwindigkeit und Detailgrad;CX, CY: Koordinaten der Bildmitte als Referenz für das Tracking;SCORE_THRESHOLD: Minimale Konfidenz für eine gültige Erkennung;DEADZONE: Abstand vom Zentrum, bevor sich die Servos bewegen (reduziert Zittern).
Servo-Initialisierung
from fusion_hat.servo import Servo
pan = Servo(2)
tilt = Servo(3)
pan.angle(0)
tilt.angle(0)
Servo(2)undServo(3)entsprechen den Kanälen auf dem Fusion HAT;.angle(0)setzt die Servos auf die Mittelposition (0°);time.sleep(1)stellt sicher, dass die Servos ihre Position erreichen, bevor das Programm fortfährt.
Kameraeinrichtung
cam = Picamera2()
cam.configure(cam.create_preview_configuration(
main={"size": (W, H), "format": "XRGB8888"}
))
Verwendet die Picamera2-Bibliothek für die moderne Kamera-API;
Das Format
XRGB8888stellt 8-Bit-Farbkanäle bereit;time.sleep(2)ermöglicht es dem Kamerasensor, sich zu stabilisieren.
MediaPipe-Detektor
model_path = str(Path(__file__).parent / "efficientdet_lite0.tflite")
options = vision.ObjectDetectorOptions(
base_options=python.BaseOptions(model_asset_path=model_path),
score_threshold=SCORE_THRESHOLD,
running_mode=vision.RunningMode.VIDEO
)
Lädt das EfficientDet-Lite0-Modell aus demselben Verzeichnis;
RunningMode.VIDEOist für kontinuierliche Frame-Verarbeitung optimiert;detect_for_video()benötigt für jedes Frame einen Zeitstempel.
Tracking-Funktion
def simple_track(x, y):
if x < CX - DEADZONE:
pan_move = 1 # Object left → move right
elif x > CX + DEADZONE:
pan_move = -1 # Object right → move left
if y < CY - DEADZONE:
tilt_move = -1 # Object up → move down
elif y > CY + DEADZONE:
tilt_move = 1 # Object down → move up
Einfache proportionale Steuerung (kein echtes PID-System);
Die Deadzone verhindert Servo-Zittern bei kleinen Bewegungen;
Gibt Bewegungswerte von -1, 0 oder 1 für jede Achse zurück.
Hauptschleifen-Verarbeitung
# Object detection
detections = detector.detect_for_video(mp_image, int(time.time() * 1000))
# Find target object
for detection in detections.detections:
for category in detection.categories:
if TARGET.lower() in str(category.category_name).lower():
bbox = detection.bounding_box
obj_x = bbox.origin_x + bbox.width // 2
obj_y = bbox.origin_y + bbox.height // 2
Frame in das MediaPipe-Bildformat konvertieren;
Objekterkennung mit aktuellem Zeitstempel ausführen;
Die Erkennungsliste nach dem Zielobjekt durchsuchen (Groß-/Kleinschreibung ignoriert);
Die Mittelpunktkoordinaten des Objekts berechnen.
Servo-Steuerlogik
if obj_x is not None:
pan_move, tilt_move = simple_track(obj_x, obj_y)
pan_pos += pan_move
tilt_pos += tilt_move
# Enforce safe angle limits
pan_pos = max(-90, min(90, pan_pos))
tilt_pos = max(-45, min(45, tilt_pos))
pan.angle(pan_pos)
tilt.angle(tilt_pos)
Bewegungsbefehle von der Tracking-Funktion erhalten;
Positionswerte aktualisieren;
Positionen auf mechanische Grenzwerte begrenzen;
Neue Winkel an die Servos senden.
Visuelles Feedback
# Tracking box (green when tracking)
cv2.rectangle(frame, (obj_x-30, obj_y-30), (obj_x+30, obj_y+30), (0,255,0), 2)
# Center crosshair (yellow)
cv2.line(frame, (CX-20, CY), (CX+20, CY), (0,255,255), 2)
cv2.line(frame, (CX, CY-20), (CX, CY+20), (0,255,255), 2)
# Status text
cv2.putText(frame, status, (10,30), cv2.FONT_HERSHEY_SIMPLEX, 0.7, color, 2)
Grünes Rechteck: aktuell verfolgtes Objekt;
Gelbes Fadenkreuz: Referenzpunkt in der Bildmitte;
Status-Text: Tracking-Zustand und Servo-Winkel.
Aufräumroutine
finally:
pan.angle(0)
tilt.angle(0)
time.sleep(0.5)
cam.stop()
cv2.destroyAllWindows()
Setzt die Servos zurück in die Mittelposition;
Stoppt die Kameraaufnahme;
Schließt alle OpenCV-Fenster;
Wird auch bei Fehlern ausgeführt (
try...finally).
6. Konfigurationsoptionen
Zielobjekt ändern
# Track different objects
TARGET = "person" # People tracking
TARGET = "cup" # Cup/glass tracking
TARGET = "book" # Book tracking
TARGET = "bottle" # Bottle tracking
Tracking-Parameter anpassen
# Slower, smoother tracking
DEADZONE = 75 # Larger deadzone = less sensitive
# Faster, more responsive tracking
DEADZONE = 30 # Smaller deadzone = more sensitive
pan_move = 2 # Larger movement steps
Servo-Bewegungsbereich begrenzen
# Restrict movement range
pan_pos = max(-60, min(60, pan_pos)) # ±60° pan limit
tilt_pos = max(-30, min(30, tilt_pos)) # ±30° tilt limit
Leistungsoptimierung
# Lower resolution for speed
W, H = 320, 240 # Faster processing
# Higher threshold for reliability
SCORE_THRESHOLD = 0.5 # Fewer false positives
7. Leistungsaspekte
Faktor |
Einfluss auf die Leistung |
Empfehlung |
|---|---|---|
Kameraauflösung |
Höher = langsamere Erkennung |
640x480 bietet eine gute Balance |
Erkennungsschwelle |
Niedriger = mehr Erkennungen, aber mehr Fehlalarme |
0.3–0.5 optimal |
Deadzone-Größe |
Größer = ruhiger, aber weniger reaktionsschnell |
40–60 Pixel |
Servo-Geschwindigkeit |
Schneller = reaktionsschneller, kann aber überschwingen |
Beschleunigungssteuerung in Betracht ziehen |
Modellgröße |
Lite0 am schnellsten, Lite2 am genauesten |
Lite0 für Echtzeit-Tracking |
Erwartete Leistung:
Raspberry Pi 4: 8–15 FPS bei 640x480
Erkennungsverzögerung: 100–200 ms
Servo-Reaktionszeit: 50–100 ms pro Grad
Gesamtsystemlatenz: 200–400 ms
8. Fehlerbehebung
Problem |
Mögliche Ursache |
Lösung |
|---|---|---|
Keine Objekterkennung |
Objekt nicht in COCO-Klassen enthalten |
Unterstützte Objektnamen verwenden |
Ruckartige Servo-Bewegung |
Deadzone zu klein |
DEADZONE auf 60–80 erhöhen |
Servo überschwingt |
Bewegungsschritt zu groß |
pan_move von 1 auf 0.5 ändern |
Niedrige Bildrate |
Auflösung zu hoch |
Auf 320x240 reduzieren |
Kamera funktioniert nicht |
Kamera nicht aktiviert |
|
Servos bewegen sich nicht |
Falsche Verkabelung oder Stromversorgung |
Verbindungen und Stromversorgung prüfen |
Objekt wird häufig verloren |
Schwellenwert zu hoch |
SCORE_THRESHOLD auf 0.2 reduzieren |
Falsche Tracking-Richtung |
Servoausrichtung vertauscht |
Vorzeichen von pan_move tauschen |
Debugging-Tipps:
Servos separat testen:
pan.angle(45) # Should move right time.sleep(1) pan.angle(-45) # Should move left
Objekterkennung überprüfen:
print(f"Found: {category.category_name} {c.score:.2f}")
Objektkoordinaten prüfen:
print(f"Object at: ({obj_x}, {obj_y}), Center: ({CX}, {CY})")
Bildrate überwachen:
import time start = time.time() # ... processing ... fps = 1 / (time.time() - start) print(f"FPS: {fps:.1f}")
9. Erweiterte Modifikationen
1. PID-Regelung implementieren
class PIDController:
def __init__(self, kp=0.1, ki=0.01, kd=0.05):
self.kp, self.ki, self.kd = kp, ki, kd
self.prev_error = 0
self.integral = 0
def update(self, error, dt=1.0):
self.integral += error * dt
derivative = (error - self.prev_error) / dt
output = self.kp*error + self.ki*self.integral + self.kd*derivative
self.prev_error = error
return output
2. Mehrfach-Objektverfolgung
# Track closest object
best_dist = float('inf')
best_obj = None
for detection in detections.detections:
bbox = detection.bounding_box
obj_x = bbox.origin_x + bbox.width // 2
obj_y = bbox.origin_y + bbox.height // 2
dist = ((obj_x - CX)**2 + (obj_y - CY)**2)**0.5
if dist < best_dist:
best_dist = dist
best_obj = (obj_x, obj_y)
3. Geschwindigkeit proportional zur Entfernung
def adaptive_track(x, y):
if x is None:
return 0, 0
# Calculate distance from center
dx = x - CX
dy = y - CY
# Speed proportional to distance (with deadzone)
pan_move = 0
tilt_move = 0
if abs(dx) > DEADZONE:
pan_move = dx * 0.02 # 2% of distance per frame
if abs(dy) > DEADZONE:
tilt_move = dy * 0.02
return pan_move, tilt_move
4. Objektgedächtnis (Trägheits-Tracking)
# Keep tracking briefly when object lost
OBJECT_TIMEOUT = 10 # frames
lost_counter = 0
if obj_x is not None:
last_x, last_y = obj_x, obj_y
lost_counter = 0
elif lost_counter < OBJECT_TIMEOUT:
obj_x, obj_y = last_x, last_y # Use last known position
lost_counter += 1
10. Anwendungen und Erweiterungen
Bildungsanwendungen:
Prinzipien von Robotik und Automatisierung
Grundlagen der Computer Vision
Regelungssysteme (P vs. PID)
Echtzeit-Systemdesign
Praktische Anwendungen:
Automatisches Tracking für Sicherheitskameras
Kamerasteuerung für Videokonferenzen
Beobachtung von Wildtieren
Assistive Technologien zur Objektverfolgung
Erweiterungsprojekte:
Webschnittstelle: Fernsteuerung über den Browser
Voreinstellungen: Häufige Tracking-Positionen speichern/laden
Objektlernen: Training auf benutzerdefinierte Objekte
Multi-Kamera: Koordination mehrerer Tracking-Einheiten
Cloud-Integration: Tracking-Daten zur Analyse hochladen
Audio-Feedback: Tracking-Status ansagen
Gestensteuerung: Handgesten zur Steuerung des Trackings verwenden
11. Sicherheit und Best Practices
Mechanische Sicherheit:
Alle beweglichen Teile sicher befestigen
Kabelmanagement verwenden
Quetschstellen vermeiden
Angemessene Winkelbegrenzungen festlegen
Elektrische Sicherheit:
Externe Stromversorgung für Servos verwenden
Für ordnungsgemäße Erdung sorgen
Überlastung der Stromversorgung vermeiden
Leitungen mit geeignetem Querschnitt verwenden
Software-Sicherheit:
Servos beim Beenden immer in Mittelposition zurücksetzen
Not-Stopp-Mechanismus implementieren
Fehler zur Fehlersuche protokollieren
Eingaben und Grenzwerte validieren
Betriebssicherheit:
Abstand zu beweglichen Mechanismen halten
Überhitzung überwachen
Regelmäßige Wartung durchführen
Manuelle Übersteuerungsmöglichkeit vorsehen
12. Zusammenfassung
Dieses Kapitel demonstrierte ein vollständiges Objektverfolgungssystem mit:
MediaPipe Tasks für zuverlässige Objekterkennung
Pan-Tilt-Servos für physisches Tracking
Einfacher proportionaler Steuerung für die Bewegungslogik
OpenCV für visuelles Feedback und Anzeige
Das System bildet eine Grundlage für fortgeschrittene Tracking-Anwendungen und veranschaulicht zentrale Konzepte der Echtzeit-Computer-Vision, der Regelungstechnik und der eingebetteten Python-Programmierung.
Durch Anpassung des Zielobjekts, der Parameter und der Steuerlogik kann dieses System für verschiedenste Anwendungen eingesetzt werden – von Demonstrationen im Bildungsbereich bis hin zu praktischen Automatisierungslösungen.
Nächste Schritte:
PID-Regelung für sanfteres Tracking implementieren
Objektgedächtnis für temporäre Verdeckungen hinzufügen
Weboberfläche für Fernüberwachung erstellen
Integration in Heimautomationssysteme
Eigene Objekterkennungsmodelle trainieren