Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauchen Sie mit anderen Enthusiasten tiefer in Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Expertenunterstützung: Lösen Sie Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Tutorials aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und Sneak Peeks.
Sonderrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu gestalten? Klicken Sie auf [here] und treten Sie noch heute bei!
10. Objekterkennung
1. Überblick
Neben spezialisierten Modellen für Gesicht, Hände und Pose stellt MediaPipe auch einen allgemeinen Object Detector auf Basis von TensorFlow Lite bereit.
Dieses Kapitel zeigt, wie das Modell
efficientdet_lite0.tflite auf dem Raspberry Pi
für Echtzeit-Objekterkennung verwendet wird und wie die Ergebnisse
im Kamerabild visualisiert werden.
Dieses Modul kann verwendet werden für:
Echtzeit-Demonstrationen zur Objekterkennung
Wahrnehmungssysteme für Smart Home / Robotik
Einfache Sicherheitsüberwachung
Embedded-Vision-Projekte
2. Funktionsweise
Das Programm führt die folgenden Schritte aus:
Initialisierung des MediaPipe Tasks ObjectDetector und Laden des Modells
efficientdet_lite0.tflite.Erfassen von Frames aus dem Picamera2-Videostream.
Konvertieren jedes Frames in ein MediaPipe-
mp.Image-Objekt.Aufruf von
detect_for_videozur Echtzeit-Objekterkennung.Zeichnen von Bounding-Boxen und Labels mit OpenCV.
Begrenzung der Anzahl angezeigter Erkennungen, um eine übersichtliche Darstellung und stabile Leistung auf dem Raspberry Pi zu gewährleisten.
3. Modellvorbereitung
Dieses Beispiel verwendet das Modell EfficientDet Lite0 im TensorFlow-Lite-Format (TFLite).
EfficientDet Lite0 ist leichtgewichtig und für Embedded-Geräte wie den Raspberry Pi optimiert. Es bietet ein gutes Gleichgewicht zwischen Geschwindigkeit und Genauigkeit.
Die Datei efficientdet_lite0.tflite ist im Projektverzeichnis enthalten
und kann direkt verwendet werden.
Wenn eine höhere Genauigkeit erforderlich ist und die Hardwareleistung ausreicht, können Sie stattdessen verwenden:
EfficientDet Lite1
EfficientDet Lite2
Sie können das Modell auch durch ein eigenes, selbst trainiertes TFLite-Objekterkennungsmodell ersetzen, solange es den Formatanforderungen des MediaPipe Tasks Object Detector entspricht.
4. Code ausführen
Wichtig
Stellen Sie vor dem Start sicher, dass:
das Pan-Tilt-Modul montiert ist
Sie Zugriff auf den Raspberry-Pi-Desktop haben
das Codepaket installiert ist
das Fusion HAT+ installiert und konfiguriert ist
OpenCV installiert ist
Detaillierte Anweisungen finden Sie unter 0. OpenCV einrichten.
Öffnen Sie das Terminal und geben Sie den folgenden Befehl ein:
sudo python3 ~/ai-lab-kit/mediapipe/mp_object.py
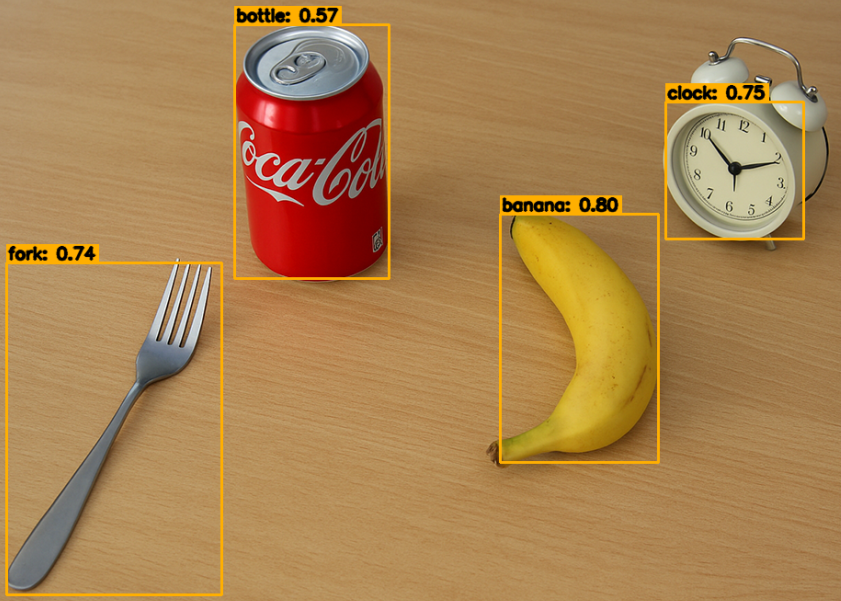
Nach dem Start des Programms öffnet sich ein Fenster mit dem Titel „Show Video“ und zeigt den Live-Kamerastream an.
Für jedes Videoframe wird das Object-Detector-Modell (
efficientdet_lite0.tflite) in Echtzeit ausgeführt und sucht nach erkennbaren Objekten in der Szene.Wenn Objekte erkannt werden:
Um jedes Objekt wird eine rechteckige Bounding-Box gezeichnet.
Über der Box wird ein Label mit Konfidenzwert im Format
name: scoreangezeigt (z. B.person: 0.87).Es werden nur Erkennungen oberhalb von
SCORE_THRESHOLD(Standard 0.5) angezeigt.Um die Darstellung übersichtlich zu halten und die Leistung zu sichern, werden pro Frame höchstens
MAX_DRAWErkennungen (Standard 20) gezeichnet.
Wenn sich das Kamerabild verändert, werden Bounding-Boxen und Labels kontinuierlich in Echtzeit aktualisiert.
Drücken Sie
q, um das Programm zu beenden. Die Kamera stoppt und das OpenCV-Fenster wird automatisch geschlossen.
5. Vollständiger Code
# STEP 1: Import the necessary modules.
from picamera2 import Picamera2, Preview
import cv2
import numpy as np
import time
from pathlib import Path
import mediapipe as mp
from mediapipe.tasks import python
from mediapipe.tasks.python import vision
# -------------------- Paths & basic settings --------------------
BASE_DIR = Path(__file__).resolve().parent
TFLITE_MODEL_PATH = str(BASE_DIR / "efficientdet_lite0.tflite") # Model path
SCORE_THRESHOLD = 0.5
MAX_DRAW = 20 # Limit the number of drawn detections
# -------------------- Helper: visualization --------------------
def visualize(bgr_image: np.ndarray, detection_result) -> np.ndarray:
img = bgr_image.copy()
h, w = img.shape[:2]
drawn = 0
for det in detection_result.detections:
bbox = det.bounding_box
x1 = max(0, min(int(bbox.origin_x), w - 1))
y1 = max(0, min(int(bbox.origin_y), h - 1))
x2 = max(0, min(int(bbox.origin_x + bbox.width), w - 1))
y2 = max(0, min(int(bbox.origin_y + bbox.height), h - 1))
# top-1 category
if det.categories:
c = det.categories[0]
name = c.category_name if c.category_name else "object"
score = c.score if c.score is not None else 0.0
caption = f"{name}: {score:.2f}"
else:
caption = "object"
# Draw bounding box
cv2.rectangle(img, (x1, y1), (x2, y2), (0, 175, 255), 2)
(tw, th), _ = cv2.getTextSize(caption, cv2.FONT_HERSHEY_SIMPLEX, 0.6, 2)
cv2.rectangle(img, (x1, y1 - th - 6), (x1 + tw + 4, y1), (0, 175, 255), -1)
cv2.putText(img, caption, (x1 + 2, y1 - 4),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (0, 0, 0), 2, cv2.LINE_AA)
drawn += 1
if drawn >= MAX_DRAW:
break
return img
# STEP 2: Initialize the detector
BaseOptions = python.BaseOptions
ObjectDetectorOptions = vision.ObjectDetectorOptions
RunningMode = vision.RunningMode
base_options = BaseOptions(model_asset_path=TFLITE_MODEL_PATH)
options = ObjectDetectorOptions(
base_options=base_options,
score_threshold=SCORE_THRESHOLD,
running_mode=RunningMode.VIDEO,
)
detector = vision.ObjectDetector.create_from_options(options)
# STEP 3: Camera
picam2 = Picamera2()
config = picam2.create_preview_configuration(
main={"size": (640, 480), "format": "XRGB8888"},
)
picam2.configure(config)
picam2.start()
print("Streaming... press 'q' to quit")
while True:
frame_bgra = picam2.capture_array()
frame_bgr = cv2.cvtColor(frame_bgra, cv2.COLOR_BGRA2BGR)
# Convert to RGB and wrap as mp.Image
frame_rgb = cv2.cvtColor(frame_bgr, cv2.COLOR_BGR2RGB)
mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=frame_rgb)
# STEP 4: Detect
ts_ms = int(time.time() * 1000)
detection_result = detector.detect_for_video(mp_image, ts_ms)
# STEP 5: Visualize
annotated = visualize(frame_bgr, detection_result)
cv2.imshow("Show Video", annotated)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
try:
picam2.stop_preview()
except Exception:
pass
picam2.stop()
cv2.destroyAllWindows()
Nach dem Ausführen des Skripts zeigt der Kamerastream:
Bounding-Boxen um erkannte Objekte
Klassifizierungslabels und Konfidenzwerte
Echtzeit-Erkennung (auf dem Raspberry Pi etwa 10~20 FPS)
6. Code-Erklärung
Konfiguration
BASE_DIR = Path(__file__).resolve().parent
TFLITE_MODEL_PATH = str(BASE_DIR / "efficientdet_lite0.tflite")
SCORE_THRESHOLD = 0.5
MAX_DRAW = 20
SCORE_THRESHOLDsteuert die minimale Konfidenz, ab der Erkennungen angezeigt werden (wird innerhalb der Tasks-Runtime angewendet).MAX_DRAWist eine UI-Hilfseinstellung, um zu begrenzen, wie viele Boxen pro Frame gezeichnet werden.
Importe
from picamera2 import Picamera2, Preview
import cv2, numpy as np, time
from pathlib import Path
import mediapipe as mp
from mediapipe.tasks import python
from mediapipe.tasks.python import vision
mediapipe.tasks.python.visionenthält die ObjectDetector-Tasks-API.Für Fensteranzeige und Zeichnen wird weiterhin klassisches OpenCV verwendet.
Visualisierungs-Hilfsfunktion
def visualize(bgr_image: np.ndarray, detection_result) -> np.ndarray:
"""
Draw bounding boxes and category labels on a BGR image.
Compatible with MediaPipe Tasks ObjectDetector's detection_result.
"""
img = bgr_image.copy()
h, w = img.shape[:2]
drawn = 0
for det in detection_result.detections:
bbox = det.bounding_box # (origin_x, origin_y, width, height) in pixels
x1 = int(bbox.origin_x); y1 = int(bbox.origin_y)
x2 = int(bbox.origin_x + bbox.width); y2 = int(bbox.origin_y + bbox.height)
# Clamp to frame bounds (defensive)
x1 = max(0, min(x1, w - 1)); y1 = max(0, min(y1, h - 1))
x2 = max(0, min(x2, w - 1)); y2 = max(0, min(y2, h - 1))
# Top-1 category
if det.categories:
c = det.categories[0]
name = c.category_name if c.category_name else "object"
score = c.score if c.score is not None else 0.0
caption = f"{name}: {score:.2f}"
else:
caption = "object"
# Draw rectangle and caption
cv2.rectangle(img, (x1, y1), (x2, y2), (0, 175, 255), 2)
(tw, th), _ = cv2.getTextSize(caption, cv2.FONT_HERSHEY_SIMPLEX, 0.6, 2)
cv2.rectangle(img, (x1, y1 - th - 6), (x1 + tw + 4, y1), (0, 175, 255), -1)
cv2.putText(img, caption, (x1 + 2, y1 - 4),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (0, 0, 0), 2, cv2.LINE_AA)
drawn += 1
if drawn >= MAX_DRAW:
break
return img
Hält die Hauptschleife übersichtlich.
Vermeidet die Verwendung nicht vorhandener „visualize“-Hilfsfunktionen; arbeitet direkt mit den Tasks-Ausgaben.
ObjectDetector erstellen
BaseOptions = python.BaseOptions
ObjectDetectorOptions = vision.ObjectDetectorOptions
RunningMode = vision.RunningMode
base_options = BaseOptions(model_asset_path=TFLITE_MODEL_PATH)
options = ObjectDetectorOptions(
base_options=base_options,
score_threshold=SCORE_THRESHOLD,
running_mode=RunningMode.VIDEO, # VIDEO mode for streaming input
)
detector = vision.ObjectDetector.create_from_options(options)
RunningMode.VIDEOist für Videostreams optimiert und erfordert Zeitstempel.Die Tasks-Runtime übernimmt intern Bildskalierung und Normalisierung.
Kameraeinrichtung (Streaming-Quelle)
picam2 = Picamera2()
config = picam2.create_preview_configuration(
main={"size": (640, 480), "format": "XRGB8888"},
)
picam2.configure(config)
picam2.start()
640×480 bietet ein gutes Verhältnis zwischen Bildrate und Genauigkeit auf dem Raspberry Pi.
Picamera2 liefert BGRA (
XRGB8888); wir konvertieren anschließend nach BGR/RGB.
Erkennung pro Frame
frame_bgra = picam2.capture_array()
frame_bgr = cv2.cvtColor(frame_bgra, cv2.COLOR_BGRA2BGR)
frame_rgb = cv2.cvtColor(frame_bgr, cv2.COLOR_BGR2RGB)
mp_image = mp.Image(image_format=mp.ImageFormat.SRGB, data=frame_rgb)
ts_ms = int(time.time() * 1000) # monotonically increasing timestamp
detection_result = detector.detect_for_video(mp_image, ts_ms)
MediaPipe erwartet RGB-Bilddaten.
Der Zeitstempel muss bei jedem Frame ansteigen; für dieses Beispiel reicht
time.time()*1000aus.
Darstellung und Anzeige
annotated = visualize(frame_bgr, detection_result)
cv2.imshow("Show Video", annotated)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
Die Hilfsfunktion gibt ein BGR-Bild zurück, das direkt mit OpenCV angezeigt werden kann.
Drücken Sie
q, um die Schleife zu beenden.
Aufräumen
try:
picam2.stop_preview()
except Exception:
pass
picam2.stop()
cv2.destroyAllWindows()
Geben Sie immer die Kamera frei und schließen Sie alle Fenster, um zu verhindern, dass das Gerät blockiert wird.
7. Leistung und Anwendungen
Optimierungsrichtung |
Wirkung |
Empfehlung |
|---|---|---|
Auflösung |
Höhere Auflösung liefert klarere Bilder, aber geringere Geschwindigkeit |
640x480 ist ausreichend |
Modellauswahl |
Lite0 ~ Lite2 |
Lite0 ist schneller, Lite2 ist genauer |
Mehrfachobjekt-Darstellung |
Zu viele Objekte erhöhen die Latenz |
|
8. Fehlerbehebung
Keine Erkennungsergebnisse
Wenn nichts erkannt wird, ist möglicherweise die Konfidenzschwelle zu hoch.
Versuchen Sie,
SCORE_THRESHOLDzu reduzieren (z. B. von 0.5 auf 0.3) und testen Sie erneut.Niedrige Bildrate
Wenn das Video langsam wirkt, sind möglicherweise das Modell oder die Auflösung zu anspruchsvoll für den Raspberry Pi.
Verwenden Sie ein leichteres Modell (
efficientdet_lite0.tflite) und reduzieren Sie die Auflösung (z. B. 640×480 oder 320×240). Auch das Schließen anderer Hintergrundprozesse kann die Leistung verbessern.Verschobene Erkennungsboxen
Wenn Bounding-Boxen verschoben erscheinen oder außerhalb des Bildes liegen, liegt dies meist an Problemen bei der Koordinatenumrechnung.
Stellen Sie sicher, dass die Bounding-Box-Koordinaten auf die Bildgrenzen begrenzt werden. In diesem Beispiel werden
x1, y1, x2, y2bereits entsprechend begrenzt, um Zeichnungsfehler zu vermeiden.Unübersichtliche Erkennungsergebnisse
Wenn zu viele Objekte erkannt werden und der Bildschirm überladen wirkt, wird die Darstellung schwer lesbar.
Begrenzen Sie die Anzahl der gezeichneten Erkennungen mit
MAX_DRAW(z. B. 10–20), um die Visualisierung klar und stabil zu halten.
9. Zusammenfassung
In diesem Kapitel wurde eine allgemeine Objekterkennung auf Basis von MediaPipe Tasks implementiert;
Das EfficientDet-Lite0-Modell bietet ein ausgewogenes Verhältnis zwischen Genauigkeit und Leistung;
Die Methode zur Visualisierung von Erkennungsergebnissen wurde erläutert;
Kann auf eigene Modelle erweitert werden (z. B. für Obst-, Fahrzeug- oder Gefahrgut-Erkennungsszenarien).