备注
你好,欢迎来到 SunFounder 树莓派、Arduino 和 ESP32 爱好者社区的 Facebook 页面!与其他爱好者一起深入探讨树莓派、Arduino 和 ESP32。
为什么加入?
专家支持: 通过我们的社区和团队的帮助解决售后问题和技术挑战。
学习与分享: 交流技巧和教程,提升你的技能。
独家预览: 提前了解新产品发布和预告。
特别折扣: 尊享我们最新产品的专属折扣。
节日促销和赠品: 参与赠品活动和节日促销。
👉 准备好与我们一起探索和创造了吗?点击 [这里] 加入我们吧!
第 19 课 步进电机¶
介绍¶
步进电机由于其独特的设计,可以在没有任何反馈机制的情况下进行高精度控制。步进电机的轴上装有一系列磁铁,由一系列电磁线圈控制,这些线圈按特定顺序带正负电,以小“步”精确地向前或向后移动。
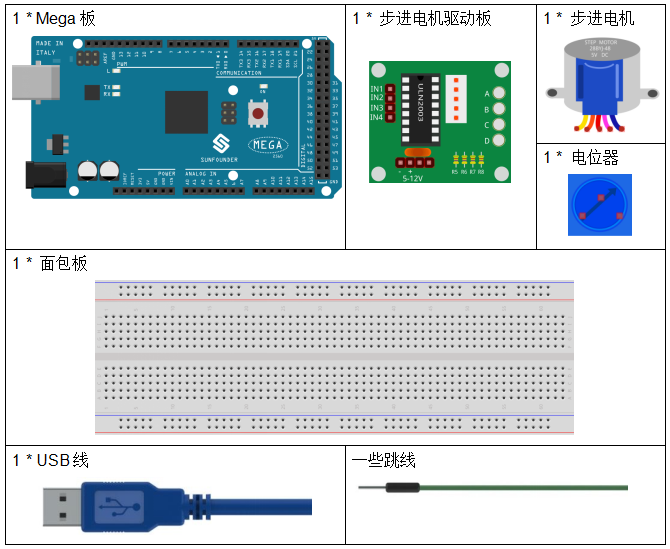
所需器件¶
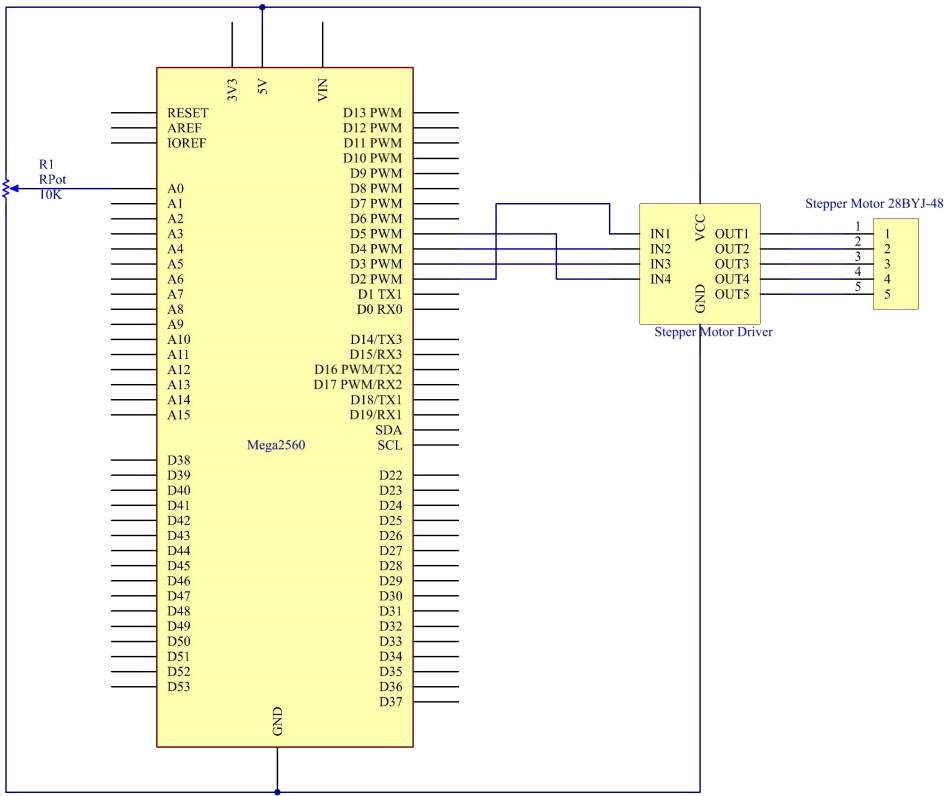
原理图¶
原理图如下所示:
实验步骤¶
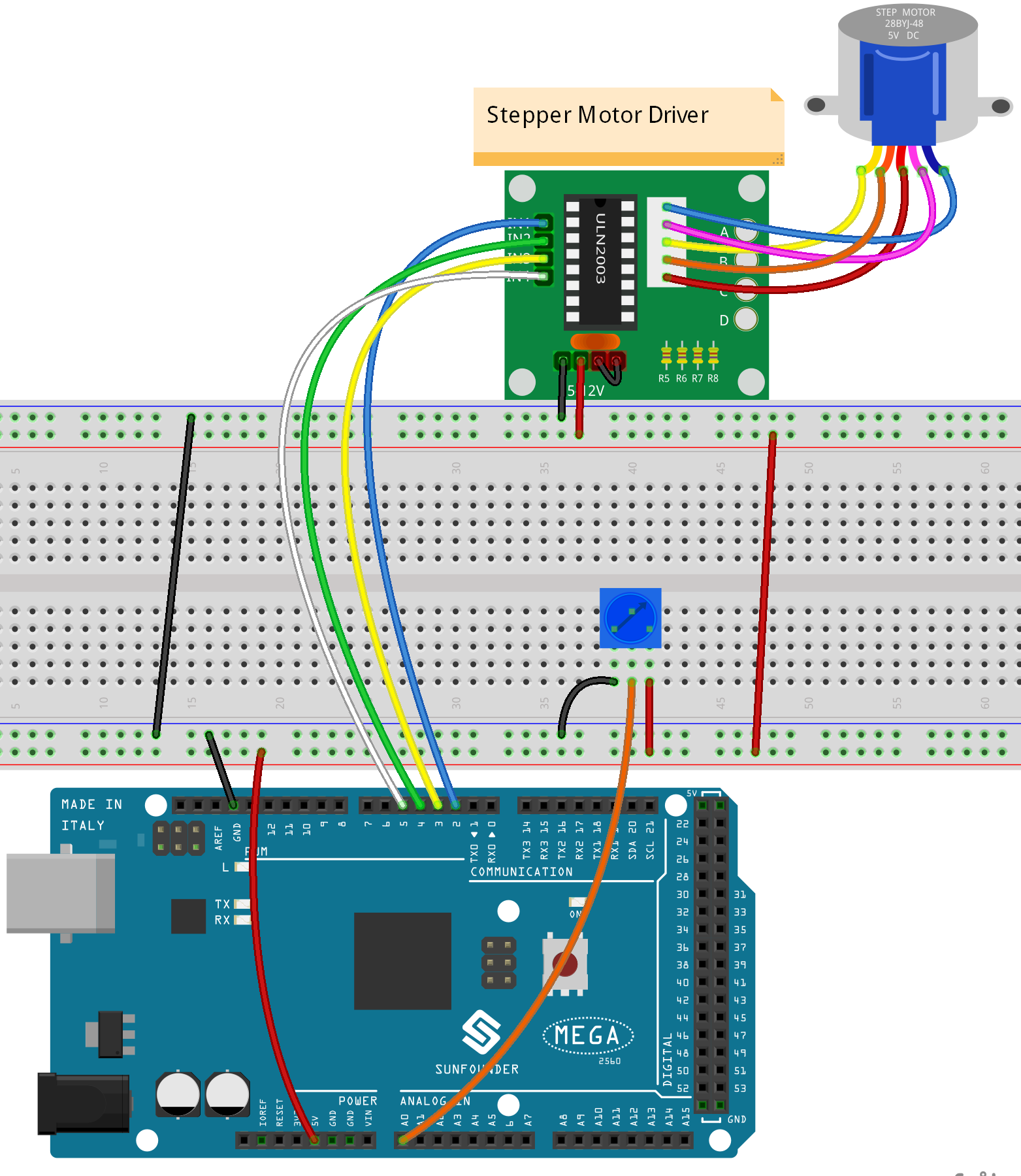
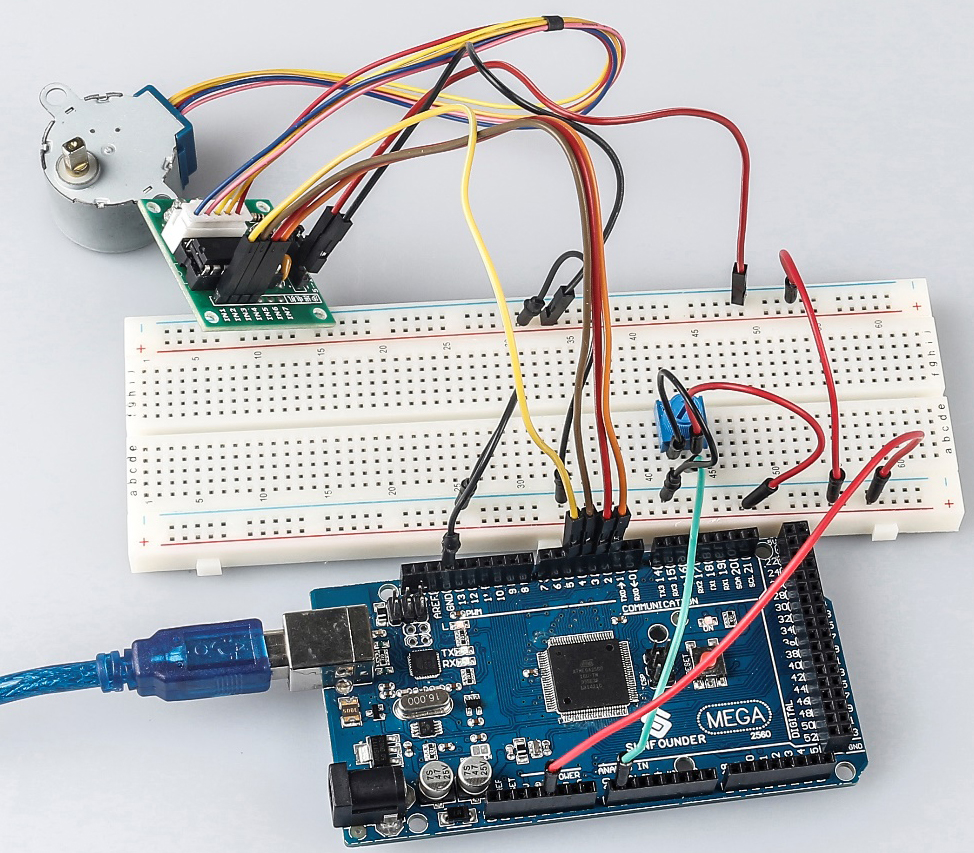
第 1 步:搭建电路。
步进电机驱动板 |
Mega板 |
IN1 |
2 |
IN2 |
4 |
IN3 |
3 |
IN4 |
5 |
GND |
GND |
VCC |
5v |
第 2 步:打开代码文件 Lesson_19_Stepper_Motor.ino。
第 3 步:选择 开发板 和 端口。
第 4 步:点击 上传 按钮来上传代码。
现在,你应该看到步进电机的摇臂顺时针和逆时针交替旋转。
代码¶
代码分析¶
初始化步进电机
#include <Stepper.h> //include a head file
//the steps of a circle
#define STEPS 2048
//set steps and the connection with MCU
Stepper stepper(STEPS, 2, 3, 4, 5);
//available to store previous value
int previous = 0;
包含头文件 Stepper.h,将步长设置为 100,然后使用函数 stepper() 初始化步进电机。
Stepper(steps, pin1, pin2, pin3, pin4):此函数创建Stepper类的新实例,代表连接到 Arduino 板的特定步进电机。steps:电机旋转一圈的步数。如果你的电机给出每步的度数,将该数字除以 360 以获得步数(例如 360 / 3.6 给出 100 步,整数型)。
setSpeed()函数
//speed of per minute
stepper.setSpeed(15); //set the motor speed in rotations per minute(RPMs)
setSpeed(rpms):以每分钟转数 (RPMs) 为单位设置电机速度。此函数不会使电机转动,只是设置调用step()时的速度。rpms:电机每分钟旋转的速度 - 一个正数(长型)。
主程序
void loop()
{
//get analog value
int val = analogRead(0); //Read the value of the potentiometer
//current reading minus the reading of history
stepper.step(val - previous); //Turn the motor in val-previous steps
//store as prevous value
previous = val; //the value of potentiometer assignment to variable previous
}
主程序是先读取A0的值,然后根据A0的值来设置步进电机转动的步数。
step(steps):以特定的步数转动电机,速度由最近调用setSpeed()确定。这个功能是阻塞的;也就是说,它将等到电机完成移动后才能将控制权传递给代码中的下一行。例如,如果你将速度设置为 1 RPM 并在 100 步电机上调用step(100),则此函数将需要整整一分钟才能运行。为了更好地控制,保持高速并且每次调用step()时只走几步。steps:转动电机的步数 - 正向转动一个方向,负向转动另一个(int)。