备注
你好,欢迎来到 SunFounder 树莓派、Arduino 和 ESP32 爱好者社区的 Facebook 页面!与其他爱好者一起深入探讨树莓派、Arduino 和 ESP32。
为什么加入?
专家支持: 通过我们的社区和团队的帮助解决售后问题和技术挑战。
学习与分享: 交流技巧和教程,提升你的技能。
独家预览: 提前了解新产品发布和预告。
特别折扣: 尊享我们最新产品的专属折扣。
节日促销和赠品: 参与赠品活动和节日促销。
👉 准备好与我们一起探索和创造了吗?点击 [这里] 加入我们吧!
第 16 课 摇杆¶
介绍¶
操纵杆是一种输入设备,由一个在底座上旋转的操纵杆组成,并向它所控制的设备报告其角度或方向。操纵杆通常用于控制视频游戏和机器人,此处使用操纵杆 PS2。
所需器件¶
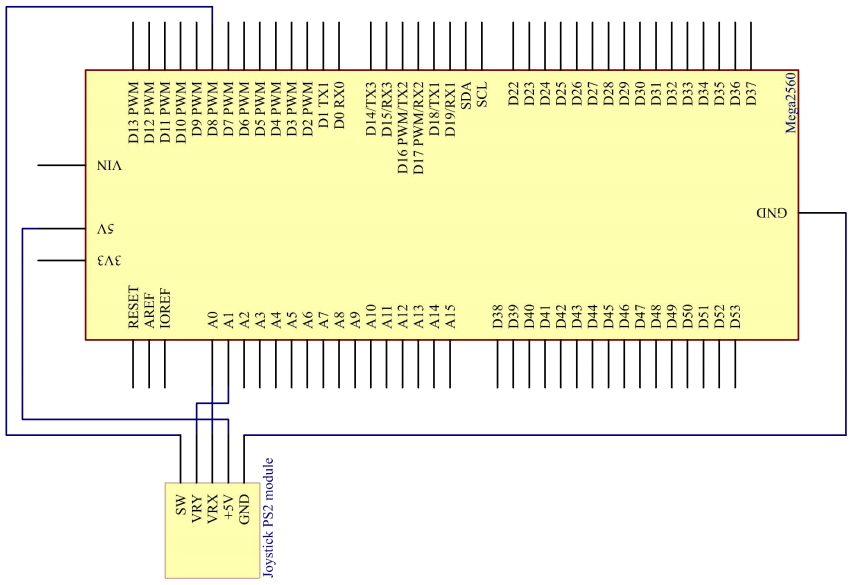
原理图¶
该模块有2路模拟量输出(对应X,Y双轴偏移)和1路数字输出(Z轴),用来表示摇杆是否被按压。
在这个实验中,将在串口监视器中显示摇杆上的X,Y和Z轴上的值的变化。
原理图如下所示:
实验步骤¶
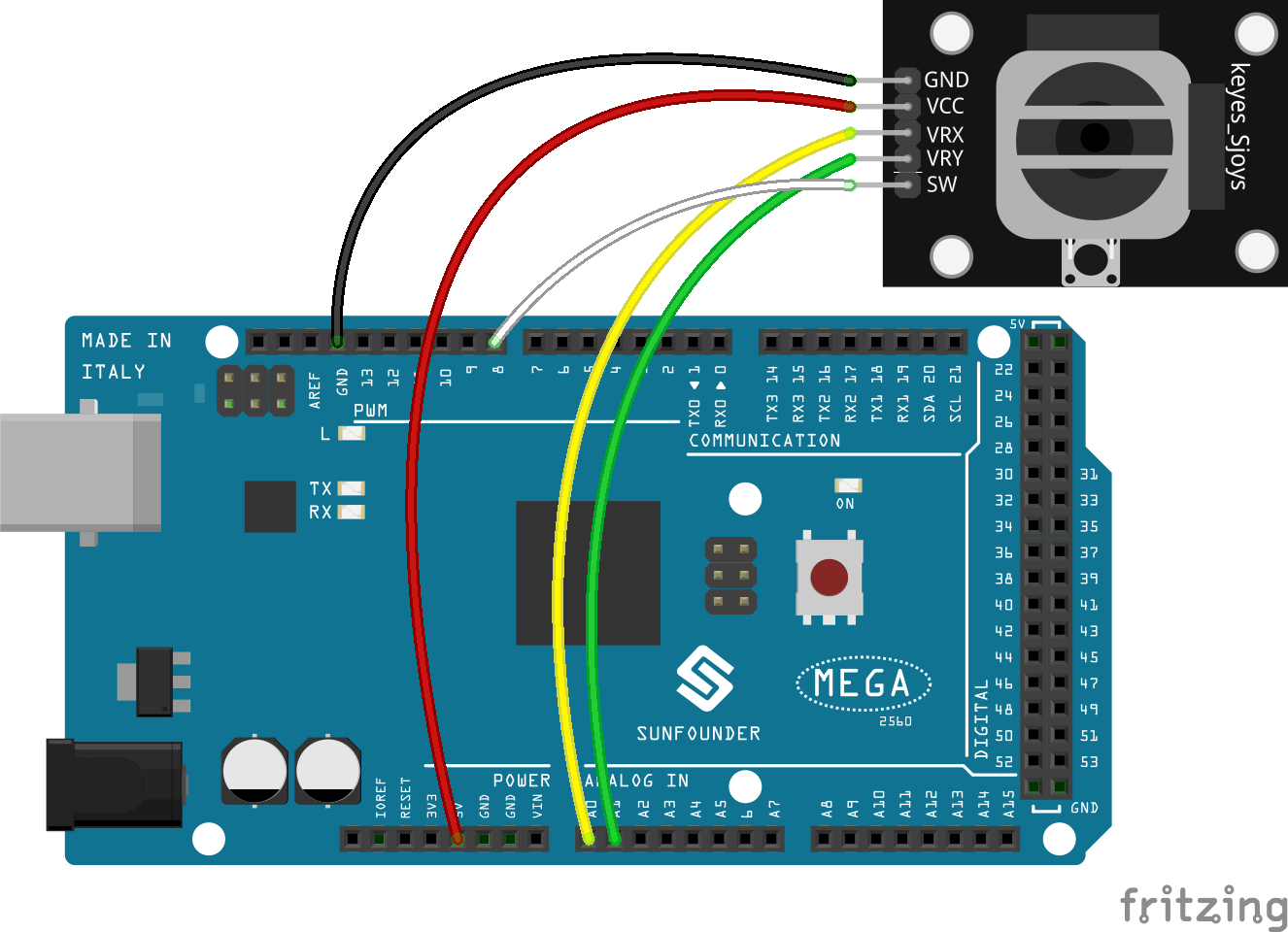
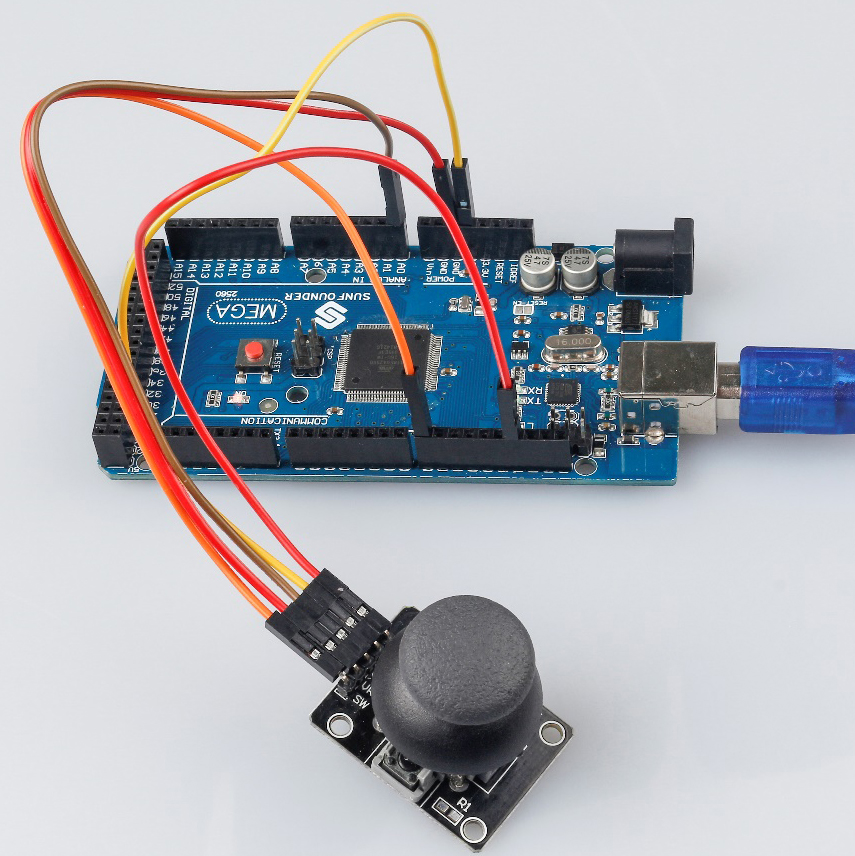
第 1 步:搭建电路。
第 2 步:打开代码文件 Lesson_16_Joystick_PS2.ino。
第 3 步:选择 开发板 和 端口。
第 4 步:点击 上传 按钮来上传代码。
现在,拨动摇杆,串口监视器上显示的 X 和 Y 轴坐标会相应改变;按摇杆,会显示 Z=0。
代码¶
代码分析¶
该代码使用串行监视器打印操纵杆 ps2 的 VRX、VRY 和 SW 引脚的值。
void loop()
{
Serial.print("X: ");
Serial.print(analogRead(xPin), DEC); // print the value of VRX in DEC
Serial.print("|Y: ");
Serial.print(analogRead(yPin), DEC); // print the value of VRX in DEC
Serial.print("|Z: ");
Serial.println(digitalRead(swPin)); // print the value of SW
delay(500);
}
"|Y: "中的|用来隔开数据。