Nota
Ciao, benvenuto nella Community SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 con altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Accedi in anticipo agli annunci dei nuovi prodotti e alle anteprime.
Sconti speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e giveaway: Partecipa a giveaway e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca [Qui] e unisciti oggi stesso!
2.1.9 Joystick (MCP3008)
Nota
A seconda della versione del tuo kit, identifica se hai ADC0834 o MCP3008 e procedi con la sezione corrispondente.
Introduzione
In questo progetto impareremo come funziona un joystick. Manipoleremo il joystick e visualizzeremo i risultati sullo schermo.
Componenti necessari
In questo progetto sono necessari i seguenti componenti.
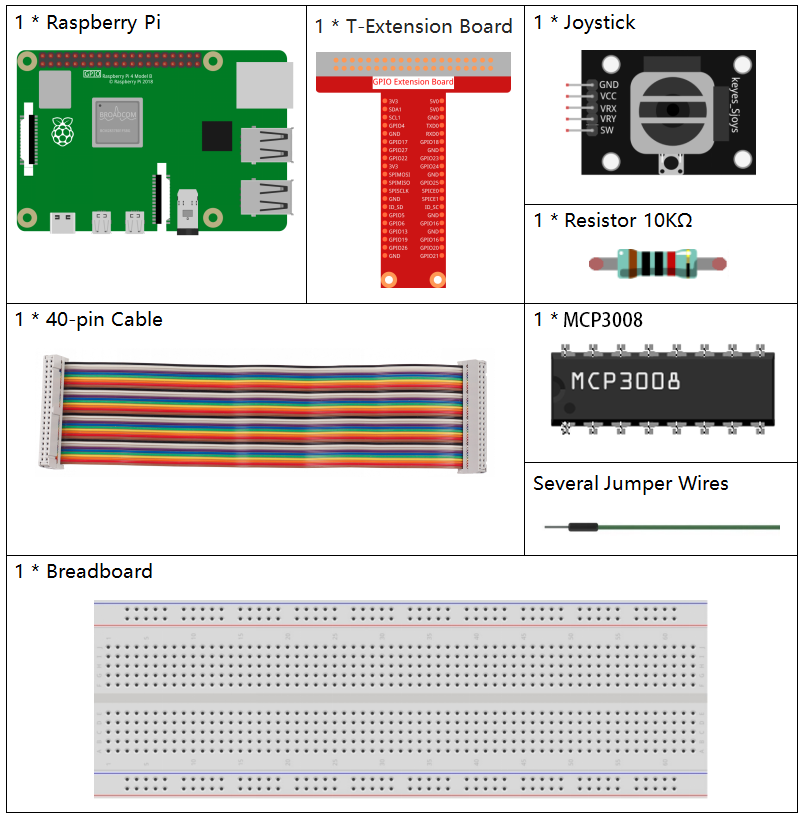
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK |
|---|---|---|
Kit Raphael |
337 |
Puoi anche acquistarli separatamente dai link sottostanti.
INTRODUZIONE COMPONENTE |
LINK DI ACQUISTO |
|---|---|
- |
|
- |
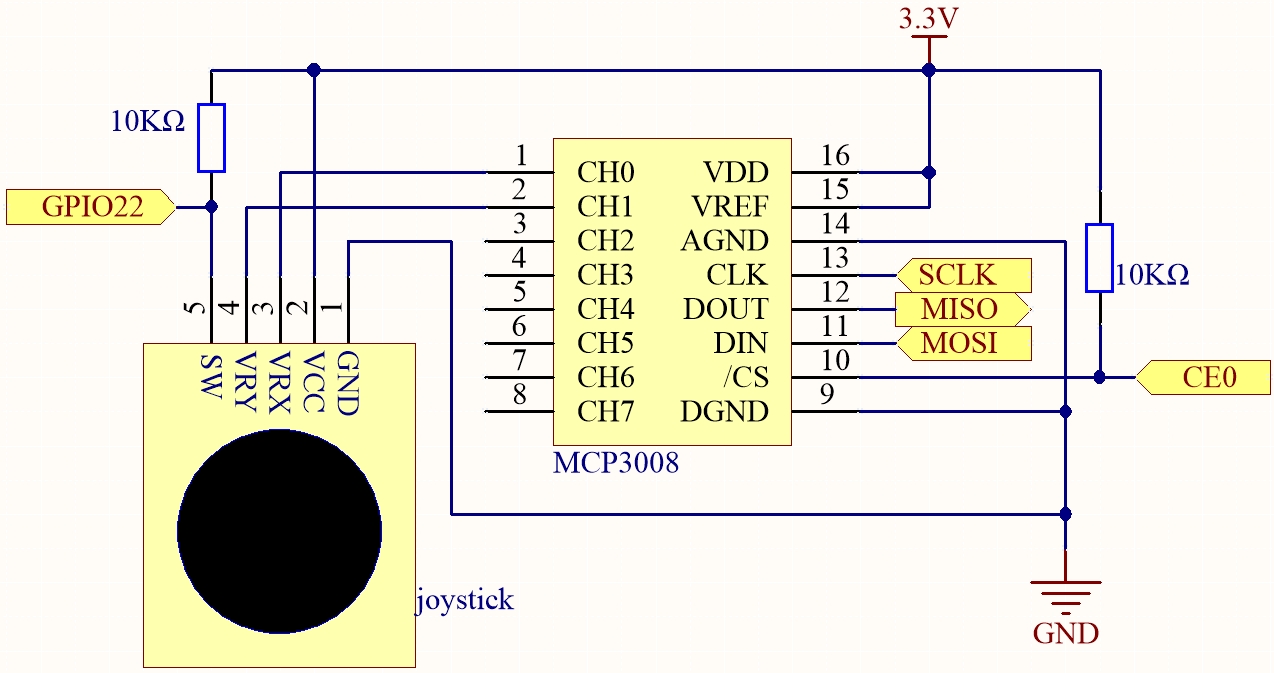
Schema elettrico
Quando vengono letti i dati del joystick, ci sono alcune differenze tra gli assi: i dati degli assi X e Y sono analogici e richiedono l’uso di MCP3008 per convertire il valore analogico in un valore digitale. I dati dell’asse Z sono digitali, quindi puoi utilizzare direttamente il GPIO per leggerli oppure usare l’ADC.
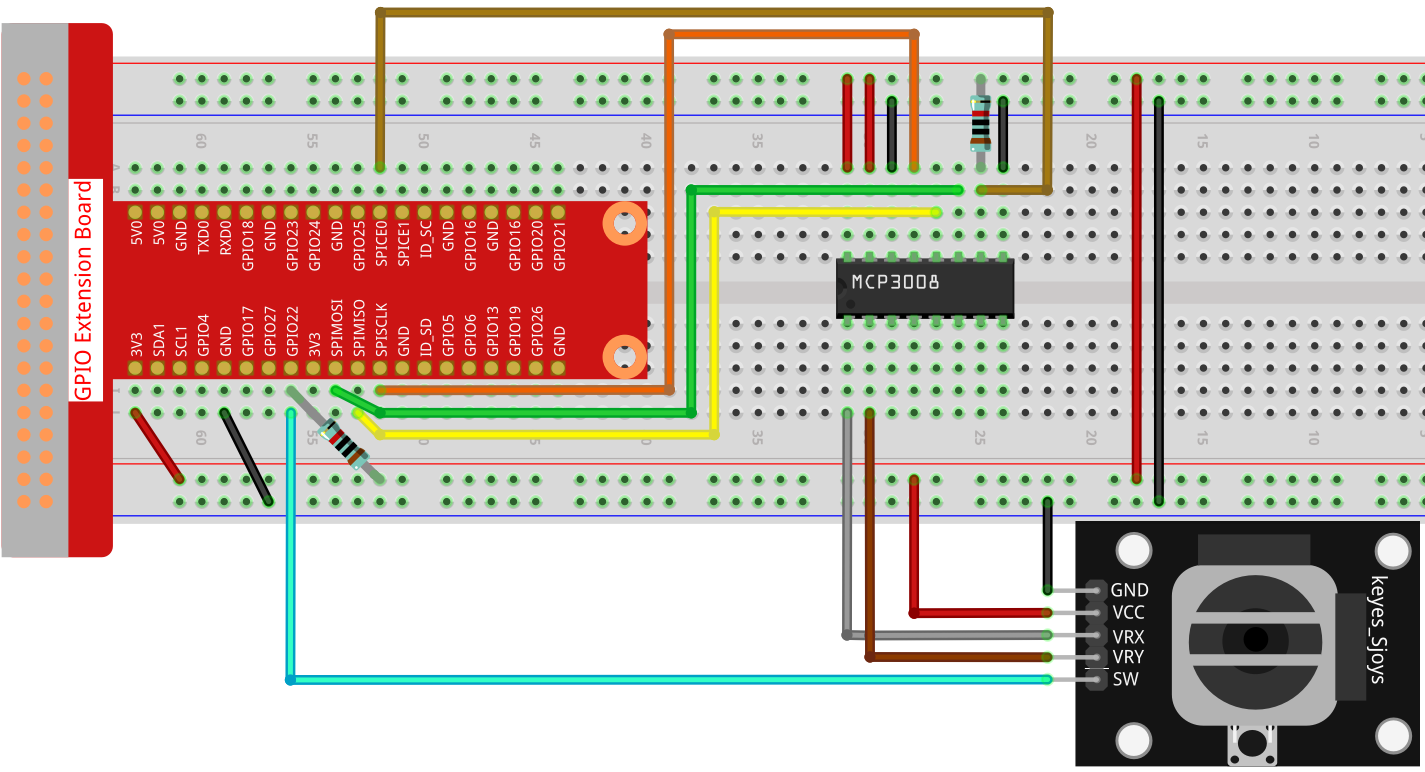
Procedure sperimentali
Passo 1: Monta il circuito.
Passo 2: Vai alla cartella del codice.
cd ~/raphael-kit/c/2.1.9-2/
Passo 3: Compila il codice.
gcc 2.1.9_Joystick.c -o joystick -lwiringPi
Passo 4: Esegui il file eseguibile.
./joystick
Dopo l’esecuzione del codice, muovi il joystick: i valori corrispondenti di x, y e Btn vengono visualizzati sullo schermo.
Nota
Se non funziona dopo l’esecuzione o compare un errore del tipo: "wiringPi.h: No such file or directory", fai riferimento a Installazione e verifica di WiringPi.
Codice
#include <wiringPi.h>
#include <wiringPiSPI.h>
#include <stdio.h>
#define SPI_CHANNEL 0
#define SPI_SPEED 1000000 // 1 MHz
#define BtnPin 3 // WiringPi 3 = BCM GPIO22
// Lettura dal canale MCP3008 (0–7)
int read_ADC(int channel) {
if (channel < 0 || channel > 7) return -1;
unsigned char buffer[3];
buffer[0] = 1; // Bit di avvio
buffer[1] = (8 + channel) << 4; // Configurazione del canale
buffer[2] = 0;
wiringPiSPIDataRW(SPI_CHANNEL, buffer, 3);
int result = ((buffer[1] & 0x03) << 8) | buffer[2];
return result;
}
int main(void) {
if (wiringPiSetup() == -1) {
printf("Inizializzazione WiringPi fallita!\n");
return 1;
}
if (wiringPiSPISetup(SPI_CHANNEL, SPI_SPEED) == -1) {
printf("Configurazione SPI fallita!\n");
return 1;
}
pinMode(BtnPin, INPUT);
pullUpDnControl(BtnPin, PUD_UP);
while (1) {
int x_val = read_ADC(0); // VRX su CH0
int y_val = read_ADC(1); // VRY su CH1
int btn_val = digitalRead(BtnPin); // Pulsante SW
printf("x = %d, y = %d, btn = %d\n", x_val, y_val, btn_val);
delay(100);
}
return 0;
}
Spiegazione del codice
Questa sezione inizializza le librerie necessarie per la comunicazione GPIO e SPI.
#include <wiringPi.h> #include <wiringPiSPI.h> #include <stdio.h> #define SPI_CHANNEL 0 #define SPI_SPEED 1000000 // 1 MHz #define BtnPin 3 // WiringPi 3 = BCM GPIO22
Definisce una funzione read_ADC() per leggere dati analogici dal MCP3008. Comunica tramite SPI per richiedere dati da un dato canale (0–7) e interpreta la risposta per ottenere un risultato ADC a 10 bit.
int read_ADC(int channel) { if (channel < 0 || channel > 7) return -1; unsigned char buffer[3]; buffer[0] = 1; buffer[1] = (8 + channel) << 4; buffer[2] = 0; wiringPiSPIDataRW(SPI_CHANNEL, buffer, 3); int result = ((buffer[1] & 0x03) << 8) | buffer[2]; return result; }
La funzione principale inizializza le interfacce WiringPi e SPI, configura il pin del pulsante del joystick e legge continuamente i valori del joystick, stampandoli sulla console.
int main(void) { if (wiringPiSetup() == -1) { printf("Inizializzazione WiringPi fallita!\n"); return 1; } if (wiringPiSPISetup(SPI_CHANNEL, SPI_SPEED) == -1) { printf("Configurazione SPI fallita!\n"); return 1; } pinMode(BtnPin, INPUT); pullUpDnControl(BtnPin, PUD_UP); while (1) { int x_val = read_ADC(0); // VRX su CH0 int y_val = read_ADC(1); // VRY su CH1 int btn_val = digitalRead(BtnPin); // SW su GPIO22 printf("x = %d, y = %d, btn = %d\n", x_val, y_val, btn_val); delay(100); } return 0; }