注釈
こんにちは、SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Communityへようこそ!Raspberry Pi、Arduino、ESP32について、他の愛好者とともにさらに深く学びましょう。
なぜ参加するのか?
専門的サポート: コミュニティとチームのサポートで、購入後の問題や技術的な課題を解決できます。
学びと共有: ヒントやチュートリアルを交換して、スキルを向上させましょう。
独占的先行公開: 新製品の発表や先取り情報を早期に手に入れましょう。
特別割引: 最新製品の特別割引を享受できます。
祭りのプロモーションとギブアウェイ: ギブアウェイやホリデープロモーションに参加できます。
👉 私たちと一緒に探索し、創造を始めましょう![ここ]をクリックして、今すぐ参加してください!
7.10 リバースアシストシステムの構築
このプロジェクトでは、Raspberry Pi Pico 2 W、超音波センサー、LED、ブザーを使用して リバースアシストシステム を作成します。 このシステムは、実際の駐車センサーがどのように機能するかをシミュレートし、障害物との距離を測定し、近づくにつれて変化する音と視覚的フィードバックを提供します。 このセットアップをリモートコントロールカーに取り付けて、ガレージにバックする体験を模倣できます。
必要な部品
このプロジェクトに必要な部品は以下の通りです。
キットを購入するのが非常に便利です。こちらのリンクをご覧ください:
名前 |
このキットのアイテム |
リンク |
|---|---|---|
Pico 2 Wスターターキット |
450+ |
また、以下のリンクから部品を個別に購入することもできます。
SN |
コンポーネント |
数量 |
リンク |
|---|---|---|---|
1 |
1 |
||
2 |
マイクロUSBケーブル |
1 |
|
3 |
1 |
||
4 |
数本 |
||
5 |
1(S8050) |
||
6 |
2(1KΩ, 220Ω) |
||
7 |
アクティブ ブザー |
1 |
|
8 |
1 |
||
9 |
1 |
コンポーネントの理解
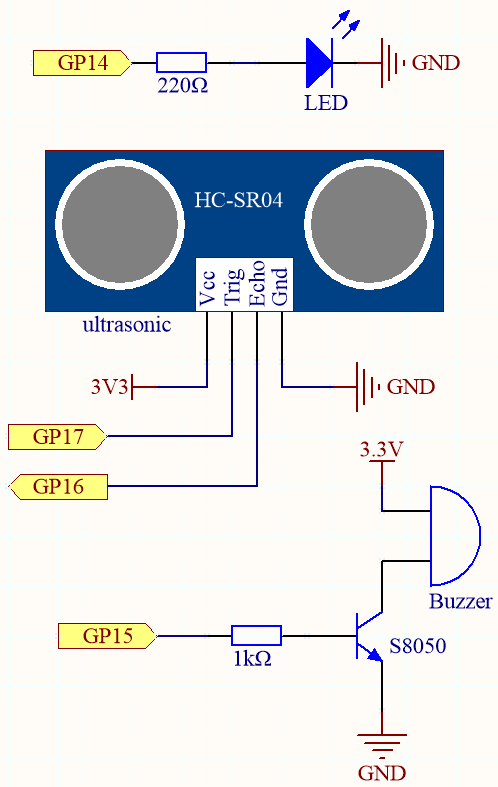
超音波センサー(HC-SR04): 超音波波を発信し、その反射が帰ってくるまでの時間を測定することで、物体までの距離を測ります。
ブザー: 音でフィードバックを提供します。物体が近づくと、より頻繁に音を鳴らします。
LED: 視覚的なフィードバックを提供します。物体が近づくにつれて、点滅速度が速くなります。
回路図
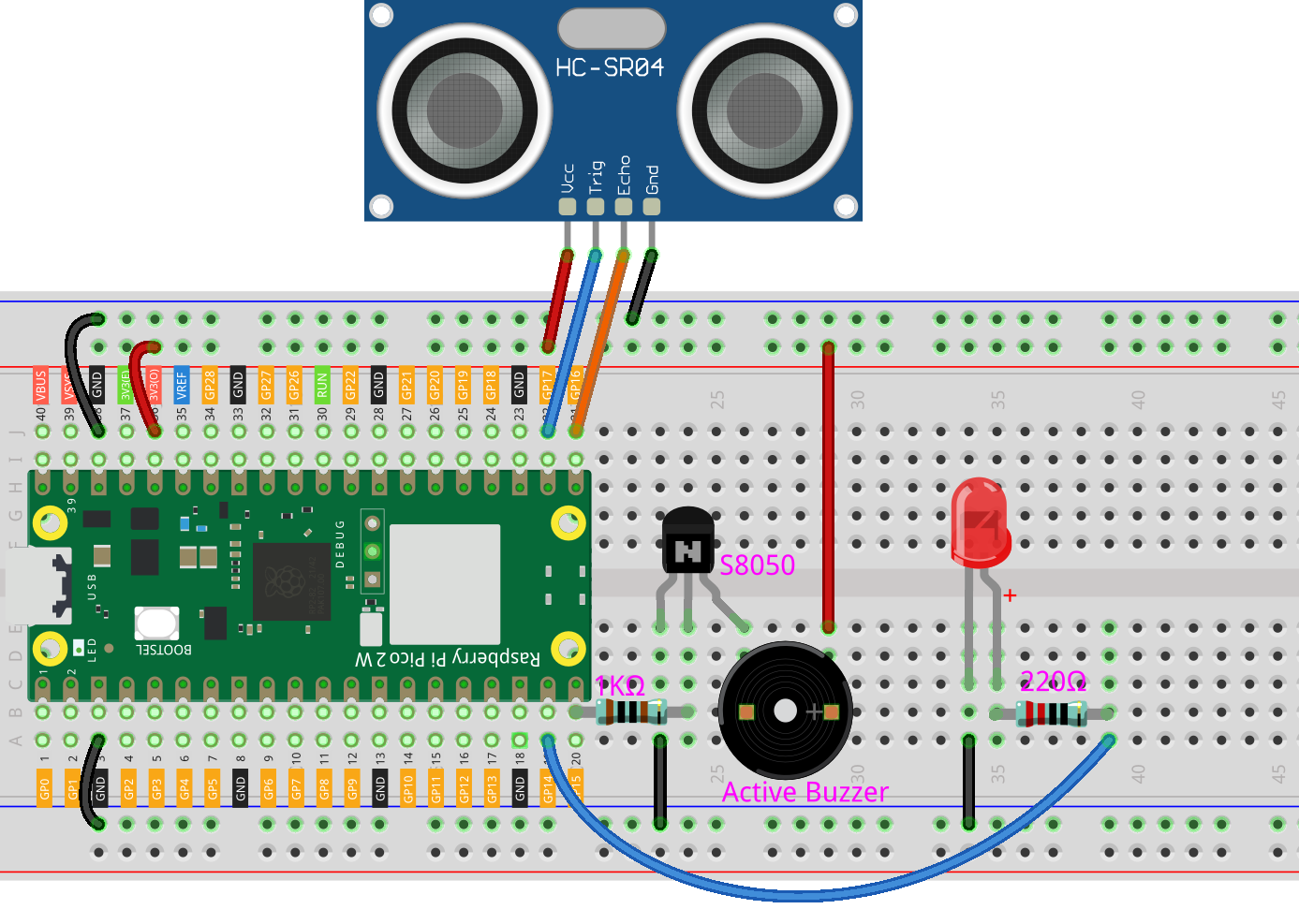
配線
コードの作成
以下のMicroPythonスクリプトを作成します:
超音波センサーを使用して距離を測定します。
距離に応じてブザーの音の頻度とLEDの点滅速度を調整します。
物体が近づいたり遠ざかったりする際に、連続的にフィードバックを提供します。
注釈
pico-2w-kit-main/micropythonから7.10_reversing_aid.pyファイルを開くか、このコードをThonnyにコピーして、「実行」をクリックするか、F5を押して実行します。正しいインタープリター「MicroPython(Raspberry Pi Pico)」が右下に選択されていることを確認してください。
import machine
import utime
# ピンの設定
trigger = machine.Pin(17, machine.Pin.OUT)
echo = machine.Pin(16, machine.Pin.IN)
buzzer = machine.Pin(15, machine.Pin.OUT)
led = machine.Pin(14, machine.Pin.OUT)
# 距離を測定する関数
def measure_distance():
# トリガーを低く設定
trigger.low()
utime.sleep_us(2)
# トリガーに10usパルスを送信
trigger.high()
utime.sleep_us(10)
trigger.low()
# エコーパルスの期間を測定
while echo.value() == 0:
signaloff = utime.ticks_us()
while echo.value() == 1:
signalon = utime.ticks_us()
timepassed = utime.ticks_diff(signalon, signaloff)
distance = (timepassed * 0.0343) / 2 # cmに変換
return distance
# ブザーとLEDを制御する関数
def alert(interval):
buzzer.high()
led.high()
utime.sleep(0.1)
buzzer.low()
led.low()
utime.sleep(interval)
# メインループ
try:
while True:
dist = measure_distance()
print("Distance: {:.2f} cm".format(dist))
if dist < 0:
print("Out of range")
utime.sleep(1)
elif dist <= 10:
alert(0.2) # 非常に近い場合、速くアラート
elif dist <= 20:
alert(0.5) # 近い場合、適度にアラート
elif dist <= 50:
alert(1) # それほど近くない場合、ゆっくりアラート
else:
alert(2) # 遠い場合、稀にアラート
except KeyboardInterrupt:
print("Measurement stopped by User")
コードが実行されると、物体を超音波センサーから異なる距離に置いたときの変化を観察できます。 ブザーの音の頻度とLEDの点滅速度の変化を確認してください。 コンソールには測定された距離が表示されます。
コードの理解
距離の測定:
measure_distance()関数はTRIGピンに10マイクロ秒のパルスを送信します。その後、ECHOピンがHIGHに変わるまでの時間を測定し、再びLOWになるまでの時間を計測します。
超音波パルスが帰ってくるまでの時間を基に距離を計算します。
def measure_distance(): # トリガーを低く設定 trigger.low() utime.sleep_us(2) # トリガーに10usパルスを送信 trigger.high() utime.sleep_us(10) trigger.low() # エコーパルスの期間を測定 while echo.value() == 0: signaloff = utime.ticks_us() while echo.value() == 1: signalon = utime.ticks_us() timepassed = utime.ticks_diff(signalon, signaloff) distance = (timepassed * 0.0343) / 2 # cmに変換 return distance
アラート機能:
alert(interval)関数はブザーとLEDを0.1秒間オンにし、その後オフにします。intervalパラメータは距離に基づいてアラート間の待機時間を調整します。
def measure_distance(): # Ensure trigger is low trigger.low() utime.sleep_us(2) # Send 10us pulse to trigger trigger.high() utime.sleep_us(10) trigger.low() # Measure the duration of the echo pulse while echo.value() == 0: signaloff = utime.ticks_us() while echo.value() == 1: signalon = utime.ticks_us() timepassed = utime.ticks_diff(signalon, signaloff) distance = (timepassed * 0.0343) / 2 # Convert to cm return distance
メインループ:
距離を継続的に測定します。
事前に設定された距離の閾値に基づいてアラートの頻度を調整します。
try: while True: dist = measure_distance() print("Distance: {:.2f} cm".format(dist)) if dist < 0: print("Out of range") utime.sleep(1) elif dist <= 10: alert(0.2) # 非常に近い場合、速くアラート elif dist <= 20: alert(0.5) # 近い場合、適度にアラート elif dist <= 50: alert(1) # それほど近くない場合、ゆっくりアラート else: alert(2) # 遠い場合、稀にアラート except KeyboardInterrupt: print("Measurement stopped by User")
安全に関する考慮事項
電圧レベル:
超音波センサーのECHOピンの電圧(5V使用時)には注意してください。
PicoのGPIOピンを保護するために、電圧分割器やレベルシフターを使用してください。
電源供給:
すべてのコンポーネントの電流要求を処理できる電源を使用してください。
さらに実験してみよう
視覚的な表示:
LCDやOLEDディスプレイを追加して、距離を視覚的に表示しましょう。
複数のセンサー:
追加の超音波センサーを使用して、より多くの方向をカバーしましょう。
高度なアラート:
距離に応じて異なるトーンやパターンのブザーを実装してみましょう。
結論
Raspberry Pi Pico 2 Wを使用してリバースアシストシステムを作成しました!このプロジェクトは、センサーを使ってリアルタイムでフィードバックを提供する方法を示しており、ロボティクスや自動化の基本概念を学べます。