注釈
こんにちは!FacebookのSunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Communityへようこそ!Raspberry Pi、Arduino、ESP32を深く学び、仲間たちと一緒に探求していきましょう。
なぜ参加するのか?
専門的なサポート: コミュニティやチームのサポートで、購入後の問題や技術的な課題を解決できます。
学びと共有: ヒントやチュートリアルを交換し、スキルを向上させましょう。
独占的な先行公開: 新製品の発表や先取り情報に早期アクセスできます。
特別割引: 最新製品の特別割引を楽しめます。
祭りのプロモーションとギブアウェイ: ギブアウェイやホリデープロモーションに参加できます。
👉 私たちと一緒に探索し、創造を始めましょう![ここ]をクリックして、今すぐ参加してください!
3.6 ポンプを動かす
このレッスンでは、Raspberry Pi Pico 2 Wと TA6586モータードライバー を使用して、 小型水ポンプ を制御する方法を学びます。 小型遠心ポンプは、自動植物灌漑システムやミニチュアの水の特徴を作成するプロジェクトに使用できます。 ポンプの制御は、DCモーターの制御と似ており、同じ原理を使用しています。
その動力部品は電動モーターで、通常のモーターとまったく同じ方法で駆動されます。
始める前の重要な注意事項
ポンプのセットアップ: ポンプの出口にチューブを接続します。ポンプをオンにする前に、水に浸しておいてください。
乾走行を避ける: ポンプは常に水中に浸しておく必要があります。ポンプを乾燥状態で運転すると、過熱してモーターが損傷する可能性があります。
詰まりを防ぐ: ポンプを植物に水をやるために使用している場合は、水にゴミが含まれていないことを確認し、詰まりを防いでください。
ポンプのプライミング: 初めて水が出ない場合、チューブ内に空気が溜まっている可能性があります。水を流して空気を取り除くことで、ポンプをプライミングする必要があります。
必要な部品
このプロジェクトで必要な部品は以下の通りです。
全ての部品がセットになったキットを購入するのが便利です。こちらのリンクをご覧ください:
名前 |
このキットのアイテム |
リンク |
|---|---|---|
Pico 2 Wスターターキット |
450+ |
また、以下のリンクから部品を個別に購入することもできます。
SN |
コンポーネント |
数量 |
リンク |
|---|---|---|---|
1 |
1 |
||
2 |
マイクロUSBケーブル |
1 |
|
3 |
1 |
||
4 |
数本 |
||
5 |
1 |
||
6 |
1 |
||
7 |
Power Pack |
1 |
|
8 |
1 |
始める前の重要な注意事項
ポンプのセットアップ: ポンプの出口にチューブを接続します。ポンプをオンにする前に、水に浸しておいてください。
乾走行を避ける: ポンプは常に水中に浸しておく必要があります。ポンプを乾燥状態で運転すると、過熱してモーターが損傷する可能性があります。
詰まりを防ぐ: ポンプを植物に水をやるために使用している場合は、水にゴミが含まれていないことを確認し、詰まりを防いでください。
ポンプのプライミング: 初めて水が出ない場合、チューブ内に空気が溜まっている可能性があります。水を流して空気を取り除くことで、ポンプをプライミングする必要があります。
回路図
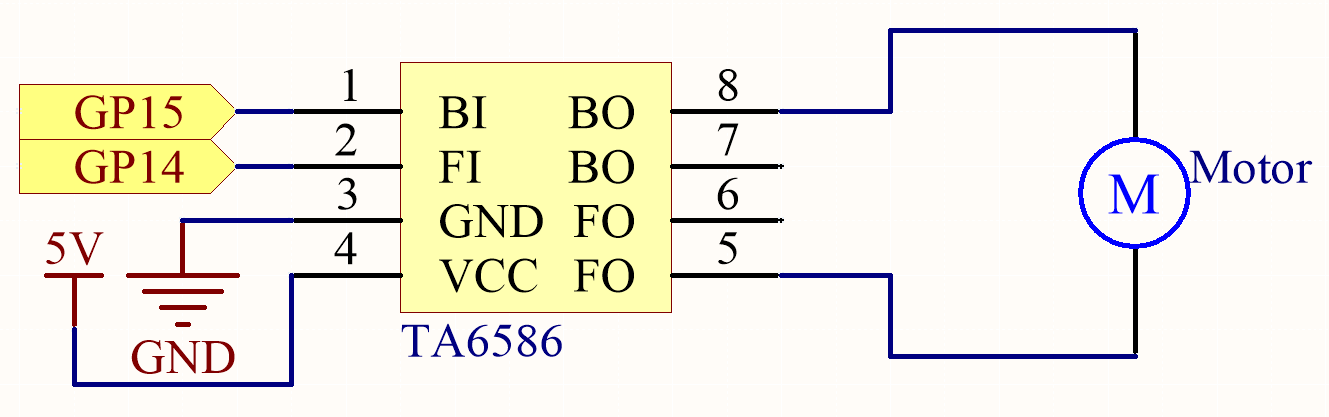
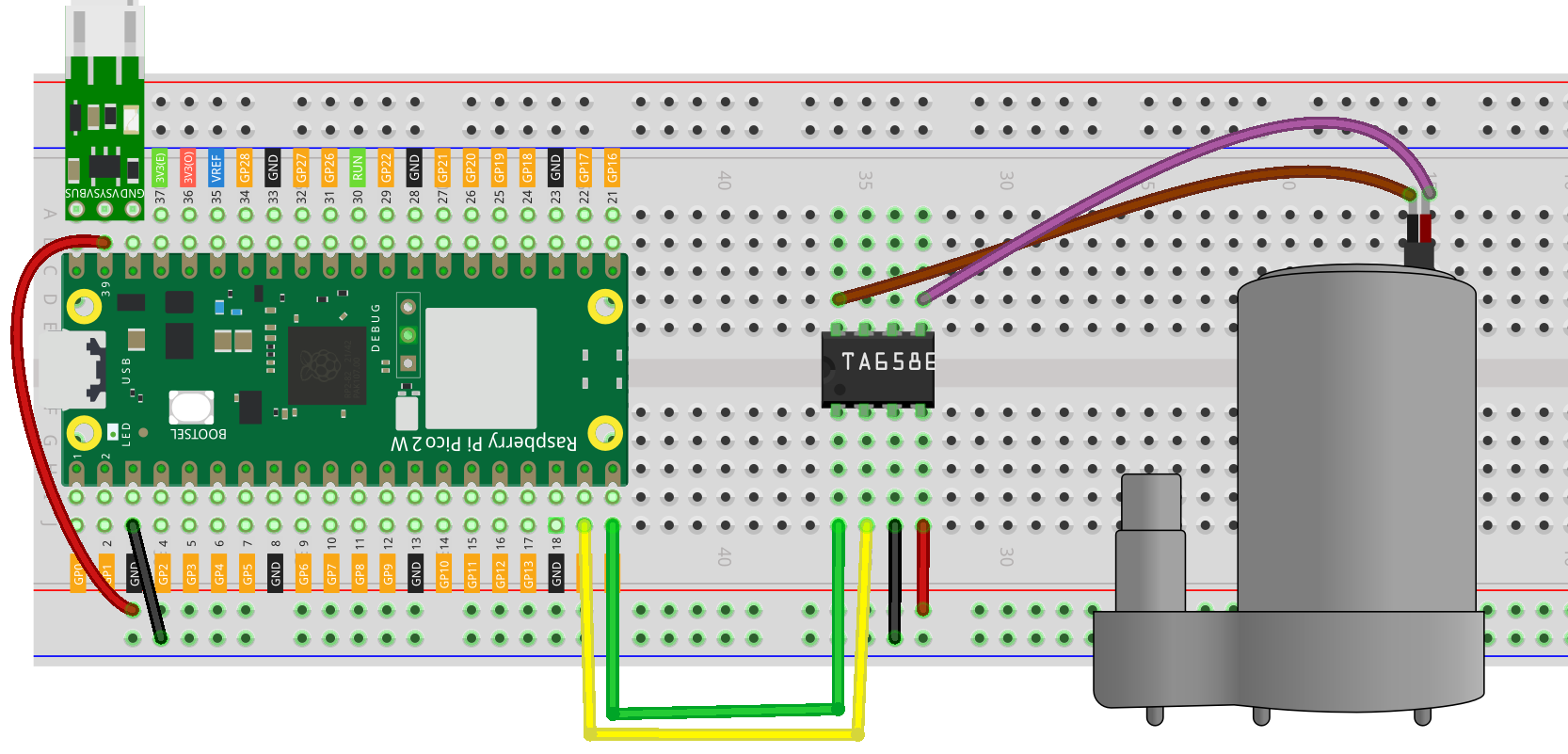
配線
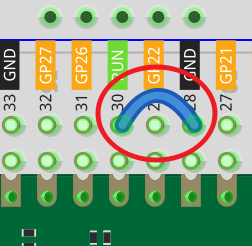
この回路では、ボタンがRUNピンに接続されています。これは、モーターが過剰な電流で動作しており、Picoがコンピューターから切断される可能性があるため、ボタンを押すことでPicoの RUN ピンが低レベルを受け取り、リセットが行われるようになっています。
コードの記述
注釈
pico-2w-kit-main/micropythonの3.6_pumping.pyファイルを開くか、このコードをThonnyにコピーして、「実行」をクリックするか、F5を押して実行します。Thonnyの右下に「MicroPython(Raspberry Pi Pico)」のインタープリタが選択されていることを確認してください。
詳細なチュートリアルについては コードを開いて直接実行 を参照してください。
import machine
import utime
# TA6586に接続された制御ピンを定義
motor1A = machine.Pin(14, machine.Pin.OUT)
motor2A = machine.Pin(15, machine.Pin.OUT)
# ポンプを起動するためにmotor1Aを高、motor2Aを低に設定
while True:
motor1A.high()
motor2A.low()
コードを実行すると、ポンプが動作を開始し、同時にチューブから水が流れ出るのが確認できます。
コードの理解
モジュールのインポート:
machine: ハードウェア関連の関数にアクセスします。utime: 遅延に使用する時間関連の関数です。
制御ピンの初期化:
motor1Aとmotor2Aは、TA6586を介してポンプを制御します。motor1A = machine.Pin(14, machine.Pin.OUT) motor2A = machine.Pin(15, machine.Pin.OUT)
ポンプの起動:
高信号をmotor1Aに、低信号をmotor2Aに適用して、ポンプを一方向に動かします。
motor1A.high() motor2A.low()
トラブルシューティングのヒント
ポンプが動作しない:
配線接続を確認してください。
ポンプが水中に浸されていることを確認してください。
Picoが応答しなくなる:
Picoが切断されたりプログラムが停止した場合、リセットする必要があります。
RUNピンをGNDに接続してリセットを行ってください。
スクリプト停止後もポンプが動き続ける:
スクリプトを停止した後、GPIOピンの最後の状態は変更されません。
RUNをGNDに接続してPicoをリセットし、ポンプを停止させてください。
安全対策
電気安全:
水と電子機器を取り扱う際は十分に注意してください。
Picoや他の電子部品を水から遠ざけて、損傷や怪我を防いでください。
ポンプの取り扱い:
ポンプを乾燥状態で運転しないでください。
水に粒子が含まれている場合は、ポンプを定期的に清掃してください。
結論
このレッスンでは、Raspberry Pi Pico 2 WとTA6586モータードライバーを使用して、小型水ポンプを制御する方法を学びました。このセットアップは、自動植物灌漑システムやミニチュアの噴水などのプロジェクトの基礎となります。