Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauche tiefer in die Welt von Raspberry Pi, Arduino und ESP32 ein und tausche dich mit anderen Technikbegeisterten aus.
Warum beitreten?
Expertenunterstützung: Erhalte Hilfe bei technischen Herausforderungen und Fragen nach dem Kauf von unserer Community und unserem Team.
Lernen & Teilen: Tausche Tipps und Tutorials aus, um deine Fähigkeiten zu erweitern.
Exklusive Vorschauen: Erhalte frühzeitigen Zugang zu neuen Produktankündigungen und Sneak Previews.
Spezielle Rabatte: Profitiere von exklusiven Vergünstigungen für unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nimm an Verlosungen und saisonalen Promotions teil.
👉 Bereit, mit uns zu entdecken und zu kreieren? Klicke auf [hier] und tritt noch heute bei!
3.5 Steuerung eines kleinen Lüfters (Gleichstrommotor)
In dieser Lektion lernen wir, wie man einen Gleichstrommotor (z. B. einen kleinen Lüfter) mit dem Raspberry Pi Pico 2 W und einem TA6586-Motortreiber steuert. Der TA6586 ermöglicht die Steuerung der Drehrichtung des Motors – sowohl im Uhrzeigersinn als auch gegen den Uhrzeigersinn.
Da der Gleichstrommotor einen relativ hohen Strom benötigt, verwenden wir zur Sicherheit ein separates Stromversorgungsmodul, um den Motor zu betreiben.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
Es ist praktisch, ein komplettes Kit zu kaufen – hier ist der Link:
Name |
ENTHALTENE ARTIKEL IM KIT |
LINK |
|---|---|---|
Pico 2 W Starter Kit |
450+ |
Alternativ kannst du die Komponenten auch einzeln über die unten stehenden Links erwerben.
SN |
KOMPONENTE |
MENGE |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro-USB-Kabel |
1 |
|
3 |
1 |
||
4 |
Mehrere |
||
5 |
1 |
||
6 |
1 |
||
7 |
1 |
||
8 |
Power Pack |
1 |
Schaltplan
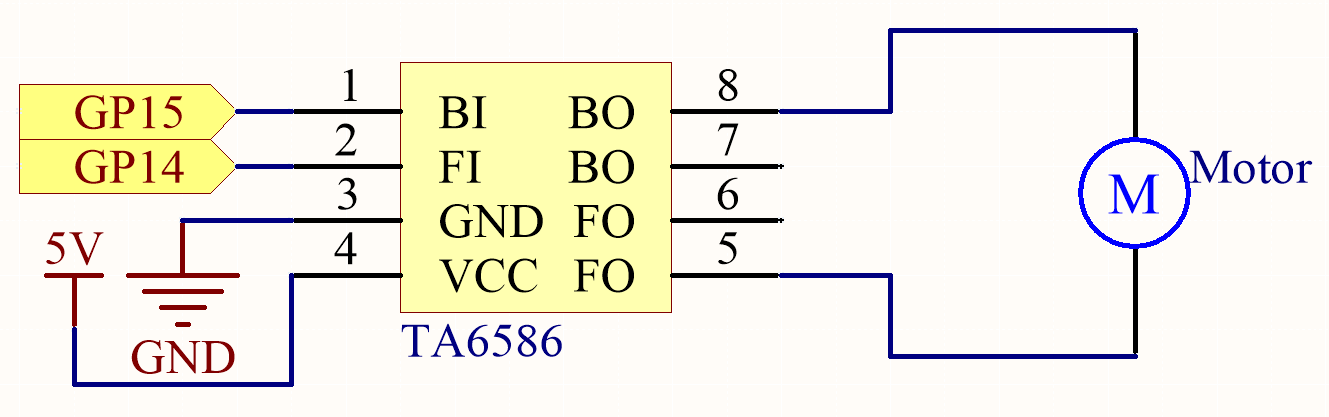
Verkabelung
Bemerkung
Da Gleichstrommotoren einen hohen Strombedarf haben, verwenden wir hier zur Sicherheit ein Li-po-Lademodul zur Stromversorgung des Motors.
Stelle sicher, dass dein Li-po-Lademodul gemäß dem Schaltplan korrekt angeschlossen ist. Andernfalls kann ein Kurzschluss dein Power Pack und die Schaltung beschädigen.

Code
Bemerkung
Öffne die Datei
3.5_small_fan.pyauspico-2w-kit-main/micropythonoder kopiere den Code in Thonny, klicke auf „Run“ oder drücke F5.Stelle sicher, dass der richtige Interpreter ausgewählt ist: MicroPython (Raspberry Pi Pico).COMxx.
import machine
import utime
motor1A = machine.Pin(14, machine.Pin.OUT)
motor2A = machine.Pin(15, machine.Pin.OUT)
def clockwise():
motor1A.high()
motor2A.low()
def anticlockwise():
motor1A.low()
motor2A.high()
def stopMotor():
motor1A.low()
motor2A.low()
while True:
clockwise()
utime.sleep(1)
stopMotor()
utime.sleep(1)
anticlockwise()
utime.sleep(1)
stopMotor()
utime.sleep(1)
Sobald das Programm läuft, dreht sich der Motor in einem regelmäßigen Muster vorwärts und rückwärts.
Den Code verstehen
Pins initialisieren:
motor1Aundmotor2Asind mit GP14 und GP15 verbunden und steuern die Drehrichtung des Motors.motor1A = machine.Pin(14, machine.Pin.OUT) motor2A = machine.Pin(15, machine.Pin.OUT)
Funktionen definieren:
rotate_clockwise(): Setztmotor1Aauf HIGH undmotor2Aauf LOW, um den Motor im Uhrzeigersinn zu drehen.rotate_counterclockwise(): Setztmotor1Aauf LOW undmotor2Aauf HIGH, um den Motor gegen den Uhrzeigersinn zu drehen.stop_motor(): Setzt sowohlmotor1Aals auchmotor2Aauf LOW, um den Motor zu stoppen.
Hauptschleife:
Der Motor dreht sich eine Sekunde im Uhrzeigersinn, stoppt, dreht sich dann eine Sekunde gegen den Uhrzeigersinn und stoppt erneut. Dieser Ablauf wiederholt sich kontinuierlich.
while True: clockwise() utime.sleep(1) stopMotor() utime.sleep(1) anticlockwise() utime.sleep(1) stopMotor() utime.sleep(1)
Fehlersuche & Tipps
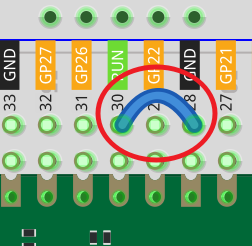
Motor läuft weiter, nachdem das Skript gestoppt wurde:
Falls der Motor nach Beenden des Programms weiterläuft, kann es notwendig sein, den Pico zurückzusetzen. Verbinde dazu kurz den RUN-Pin mit GND, um einen Reset durchzuführen.
Pico trennt sich oder reagiert nicht mehr:
Der Motor kann hohe Ströme ziehen, die Spannungsschwankungen verursachen. Stelle sicher, dass du eine separate Stromversorgung für den Motor verwendest und alle Masseleitungen (GND) verbunden sind.
Fazit
In dieser Lektion hast du gelernt, wie du einen Gleichstrommotor mit dem TA6586-Motortreiber und dem Raspberry Pi Pico 2 W steuerst. Du kannst nun die Drehrichtung des Motors kontrollieren und Projekte wie einen kleinen Lüfter oder ein motorisiertes Gerät realisieren.
Nächste Schritte
Drehzahlregelung: Verwende PWM (Pulsweitenmodulation), um die Drehzahl des Motors zu steuern, indem du den EN1-Pin mit einem PWM-fähigen GPIO-Pin verbindest.
Mehrere Motoren steuern: Nutze die zusätzlichen Kanäle des TA6586, um mehrere Motoren gleichzeitig zu betreiben.
Sensorintegration: Kombiniere Sensoren mit dem Motor, um ihn basierend auf Eingaben zu steuern (z. B. Temperatur- oder Lichtsensoren).